Изобретение относится к робототехнике и может быть использовано в качестве манипулятора роботизированного комплекса для нанесения различных покрытий на плоские поверхности, в частности при нанесении штукатурных, малярных покрытий, а также при производстве монолитных полов в строительстве.
В последнее время в связи и роботизацией практически всех сфер деятельности человека с целью устранения наиболее сложных и трудоемких операций большое внимание уделяется автоматизации операций манипулирования, в частности операций воспроизведения точных прямолинейных движений выходного звена манипулятора (схватов, рабочего инструмента). В зависимости от выполняемых манипулятором технологических процессов к точности движения предъявляют различные требования. Так, для нанесения различных покрытий на плоские поверхности необходимо осуществлять точное прямолинейной движение рабочего органа манипулятора для получения ровного и гладкого покрытия.
Для воспроизведения точной прямолинейной траектории точки конечного модуля манипулятора применяют прямолинейно-направляющие точные механизмы различных конструкций. Кинематические схемы этих механизмов разработаны таким образом, что воспроизводимая ими точная прямая проходит через точку, принадлежащую механизму, что, в свою очередь, ограничивает область их применения.
Конструкции прямолинейно-направляющих точных механизмов манипулятора исчерпывающе представлены в [1].
Наиболее близким к заявляемому техническому решению является прямолинейно-направляющий точный механизм, кинематическая схема которого приведена на рис. d, с.212 [1]. Данный механизм содержит ползун, размещенный в корпусе с возможностью перемещения, шарнирно связанное одним концом с ползуном коромысло и ролик, установленный с возможностью перемещения по направляющей поверхности кулачка.
Данной конструкции, также как и другим используемым в манипуляторах прямолинейно-направляющим точным механизмам, присущ указанный выше недостаток, состоящий в том, что точная прямая траектория точки конечного модуля манипулятора проходит через точку, принадлежащую механизму манипулятора, что влечет за собой ограниченность диапазона прямолинейного движения.
Задачами настоящего изобретения являются упрощение конструкции прямолинейно-направляющего точного механизма, увеличение диапазона прямолинейного движения точки конечного модуля манипулятора, а также осуществление возможности воспроизведения им точной прямой через точку, не принадлежащую собственно механизму.
Указанные задачи достигаются тем, что в конструкцию устройства вводится кулачковый механизм с качающимся коромыслом. При этом один конец коромысла, на котором находится конечный модуль, продлен, а другой конец шарнирно закреплен на ползуне. Тем самым, точка соприкосновения манипулятора и обрабатываемой поверхности выносится за пределы механизма, а профиль кулачка, выполненный в виде криволинейной поверхности, изогнутой в сторону обрабатываемой поверхности, позволяет увеличить диапазон прямолинейного движения точки конечного модуля. Т.к. при достижении мертвой точки механизма, т.е. положения, когда коромысло находится на одной прямой с осью ползуна, под действием сил инерции коромысло продолжит свое движение.
Существенными отличиями предлагаемого изобретения являются:
- выполнение кулачка в форме круговой направляющей поверхности, имеющей радиус R = a - d/2, где a - половина длины коромысла, d - диаметр ролика, и изогнутой в сторону обрабатываемой поверхности;
- кулачок выполнен с дополнительной круговой направляющей поверхностью для перемещения ролика;
- круговая направляющая поверхность кулачка выполнена с концами, изогнутыми по радиусу, равному радиусу ролику, в сторону, противоположную обрабатываемой поверхности;
- ползун выполнен в виде механической системы: ходовой винт-гайка, связанной посредством зубчатой передачи с электродвигателем, а один конец коромысла соединен с вышеуказанной механической системой с помощью шарнира Гука, при этом коромысло выполнено с дополнительным роликом, смонтированным в его средней части, а кулачок - с дополнительной круговой направляющей поверхностью для перемещения дополнительного ролика, причем основная и дополнительная направляющие поверхности расположены между основным и дополнительным роликами.
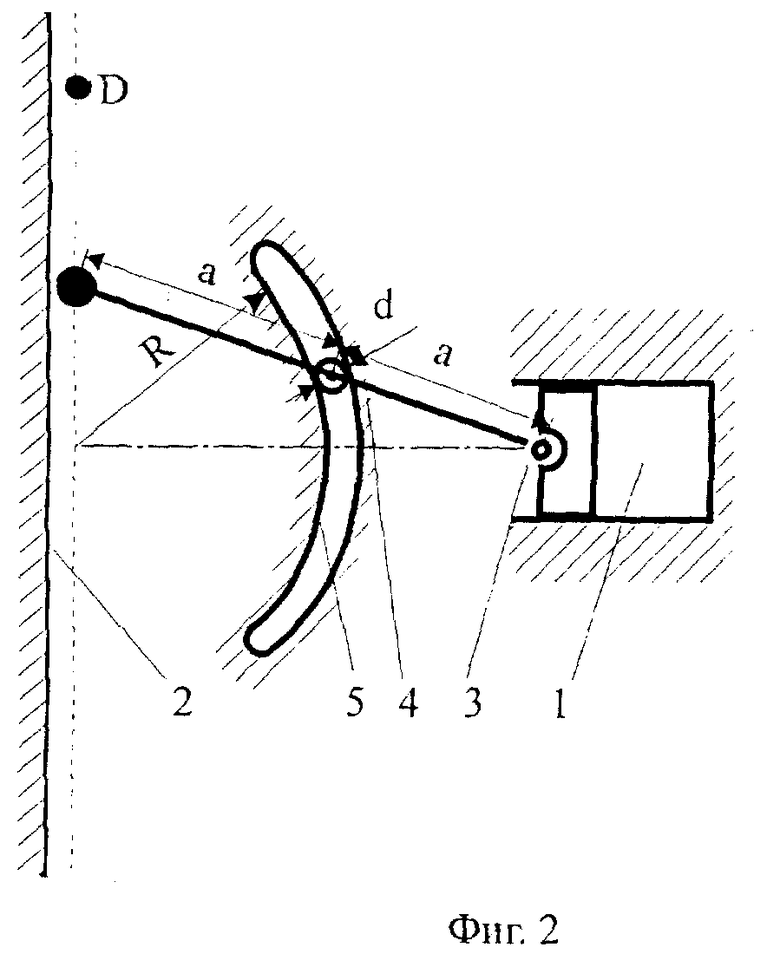
Сущность изобретения поясняется чертежами. На фиг. 1 представлена кинематическая схема устройства для нанесения покрытий на плоские вертикальные поверхности. Устройство состоит из ползуна 1, перемещающегося по оси, направленной перпендикулярно к вертикальной обрабатываемой поверхности 2, коромысла 3, один конец которого закреплен на ползуне 1 с помощью шарнира, а другой конец представляет собой конечный модуль робота, перемещающийся параллельно обрабатываемой поверхности по точной прямой. В середине коромысла 3 закреплен ролик 4, опирающийся на круговую поверхность неподвижного кулачка 5, изогнутой в сторону обрабатываемой поверхности 2 радиусом R = a - d/2, где a - половина длины коромысла 3, d - диаметр ролика 4.
Работает прямолинейно-направляющий точный механизм манипулятора следующим образом. При перемещении ползуна 1 вдоль оси, перпендикулярной обрабатываемой поверхности 2, коромысло 3 перемещается в плоскости чертежа, описывая своими концами прямые, перпендикулярные друг другу. Ролик 4, находящийся в середине коромысла 3, будет перемещаться воль кулачка 5. При условии, что ролик 4 плотно прижат к кулачку 5, незакрепленный конец коромысла 3 будет описывать точную прямую, параллельную обрабатываемой поверхности 2. При достижении мертвой точки механизма, т.е. когда коромысло 3 будет находиться на прямой, перпендикулярной обрабатываемой поверхности, ролик 4 под действием сил инерции продолжит свое движение. Тем самым, диапазон прямолинейного движения увеличится вдвое.
Кроме того, предлагается три варианта конструктивного исполнения заявляемого прямолинейно-направляющего механизма.
На фиг. 2 показана конструктивная разновидность описанного механизма, имеющая кулачок 5, который имеет дополнительную круговую направляющую поверхность для перемещения ролика 4.
Работает механизм аналогично вышеописанному.
На фиг. 3 представлен прямолинейно-направляющий точный механизм манипулятора, позволяющий наносить покрытия на плоские горизонтальные поверхности. Данный механизм состоит из ползуна 1, перемещающегося по оси, перпендикулярной плоскости горизонтальной обрабатываемой поверхности 2, коромысла 3, один конец которого шарнирно закреплен на ползуне 1, а на другом находится конечный модуль. В середине коромысла 3 закреплен ролик 4, который перемещается по кулачку 5. Кулачок 5 представляет собой направляющую, изогнутую в сторону обрабатываемой поверхности 2, в концы направляющей загнуты в обратном направлении на радиус, равный радиусу ролика 4, для предотвращения соскальзывания ролика с поверхности кулачка 5.
Работает данный механизм аналогично вышеописанному механизму, показанному на фиг. 1, но ролик 4 будет скользить и перекатываться по одной направляющей кулачка 5.
На фиг. 4 представлен прямолинейно-направляющий точный механизм манипулятора, включающий в себя механическую систему ходовой винт 4 - гайка 3. Гайка 3 кинематически связана через зубчатую передачу 2 с электродвигателем 1, а ходовой винт 4 с помощью шарнира Гука 5 сообщен с одним концом коромысла 6. На другом незакрепленном конце коромысла находится конечный модуль манипулятора. В середине коромысла 6 закреплены два ролика 7 и 8, которые охватывают с двух сторон поверхность кулачка 9. Кулачок 9 представляет собой направляющую, изогнутую в сторону обрабатываемой поверхности 10.
Работает устройство следующим образом. При включении двигателя 1 вращение через зубчатую передачу 2 передается гайке 3. При этом винт 4 начинает вывинчиваться, передавая тем самым с помощью шарнира Гука 5 коромыслу 6 качательное движение. Ролики 7 и 8 перемещаются по соответствующим поверхностям кулачка 9. Концы коромысла 6 при его перемещении описывают прямые, перпендикулярные друг другу. При условии плотного прижатия роликов 7 и 8 к кулачку 9 незакрепленный конец коромысла 6, на котором находится конечный модуль, будет описывать точную прямую, параллельную обрабатываемой поверхности, лежащей вне конструкции механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |
| КОНВЕЙЕР ДЛЯ ТРАНСПОРТИРОВАНИЯ СЫПУЧИХ И КУСКОВЫХ МАТЕРИАЛОВ | 1996 |
|
RU2102304C1 |
| КРЕПЕУСТАНОВЩИК | 1995 |
|
RU2078935C1 |
| СЕЙСМОСТОЙКОЕ СООРУЖЕНИЕ | 1997 |
|
RU2122093C1 |
| ПРОХОДЧЕСКИЙ АГРЕГАТ | 1998 |
|
RU2144138C1 |
| СМЕСИТЕЛЬ-РАСТИРАТЕЛЬ | 1995 |
|
RU2104865C1 |
| КОМПЛЕКС ДЛЯ РЕМОНТА ГОРНЫХ ВЫРАБОТОК | 1995 |
|
RU2098632C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2097569C1 |
| АДАПТИВНАЯ ЩЕКОВАЯ ДРОБИЛКА | 1996 |
|
RU2112596C1 |
| АДАПТИВНАЯ СИСТЕМА ГИДРОПРИВОДА МЕХАНИЗМА ПОДАЧИ ОЧИСТНОГО КОМБАЙНА | 1996 |
|
RU2098621C1 |


Изобретение относится к робототехнике и может быть использовано в манипуляторах роботизированных комплексов для нанесения различных покрытий на плоские поверхности. В корпусе подвижно установлен ползун, шарнирно связанный с одним концом коромысла. В средней части коромысла смонтирован ролик, перемещающийся по направляющей поверхности неподвижного кулачка. Последняя изогнута в сторону обрабатываемой поверхности и имеет радиус R = a - d/2, где a - половина длины коромысла, d - диаметр ролика. Кулачок может быть выполнен с дополнительной круговой направляющей поверхностью для ролика. Упомянутая поверхность может иметь концы, изогнутые по радиусу, равному радиусу ролика, в сторону, противоположную обрабатываемой поверхности. В результате обеспечивается упрощение конструкции механизма, увеличение диапазона прямолинейного движения точки конечного модуля манипулятора и воспроизведение им точной прямой через точку, не принадлежащую собственно механизму. 3 з.п. ф-лы, 4 ил.
| Крайнев А.В | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
| Робот к листоштамповочному прессу | 1978 |
|
SU795935A1 |
| Пространственный механизм | 1990 |
|
SU1726232A1 |
| Плоский механизм | 1991 |
|
SU1779575A1 |
| СПОСОБ МАГНИТНОЙ РЕДУКЦИИ И ПРЕОБРАЗОВАТЕЛЬ УГОЛ - КОД, РЕАЛИЗУЮЩИЙ ЕГО | 1994 |
|
RU2115228C1 |
| US 4749330 A, 07.06.88 | |||
| ШТАММ БАКТЕРИЙ GLUCONOBACTER OXYDANS - ПРОДУЦЕНТ БАЛИЗА | 1992 |
|
RU2026351C1 |
