(54) РОБОТ К ЛИСТОШТАМПОВОЧНОМУ ПРЕССУ
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Устройство для отделения листовых заготовок от стены и подачи в рабочую зону машины-орудия | 1982 |
|
SU1061899A1 |
| Манипулятор | 1978 |
|
SU774940A1 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| Промышленный робот | 1984 |
|
SU1268252A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1301531A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
| Робот к листоштамповочному прессу | 1979 |
|
SU863329A1 |
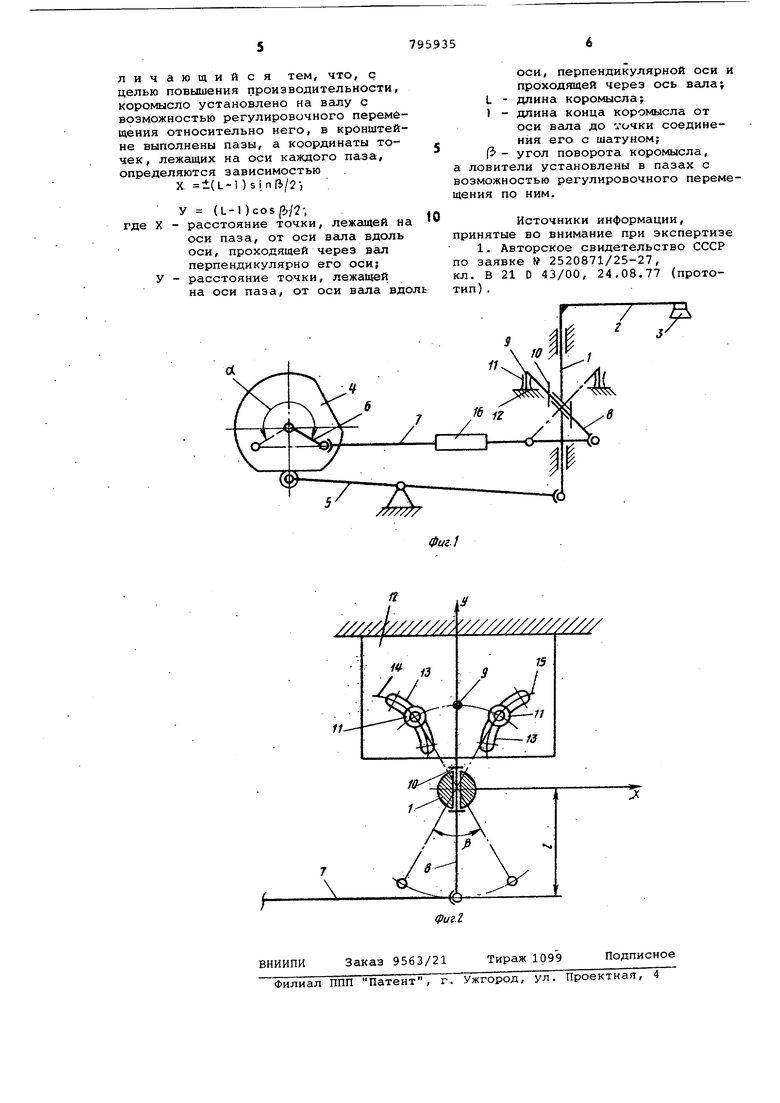
Изобретение относится к оборудова нию для автоматизации листоштамповоч ного производства и может быть испол зовано для подачи в рабочую зону пре са штучных листовых заготовок и удаления отштампованных деталей и отходов. Известен робот к листоштамповочному прессу, содержащий смонтированный на станине подъемно-поворотный вертикальный вал , жестко соединенный с плечом руки, на котором закреплен захват, привод Лодъема и поворота вертикального вала, на выходном валу которого закреплен диско вый кулачок с рабочими канавками, связанный с помощью кривошипа, шатуна, коромысла (четырехэвенного механизма) и двухплечего рычага с вертикальным валом. Шатун имеет демпферное устройство, коромысло жестко закреплено на вертикальном вешу и установлено с возможностью взаимодей ствия с упорами на станине при подходе руки в процессе поворота к край нему положению. Кривошип и коромысло выполнены без возможности регулировки по длине, чем определяется постоянство угла поворота руки L1. Работа известного робота осуществляется следующим образом. От привода приводится во вращение дисковый кулачок. С помощью двухплечего рычага и четырехзвенного механизма при вращении дискового кулачка осуществляется последовательно подъем вертикального вала, поворот в исходное положение, опускание в исходное положение и т.д.; вместе с валом перемещается захват, закрепленный, на плече руки. Заготовка захватывается на позиции загрузки захватом, переносится и опускается в штамп. Величина горизонтального перемещения руки зависит от длины руки, кривошипа и коромысла. Длина руки в роботе при настройке может быть изменена. Необходимая величина вылета руки определяется размерами стола обслуживаемого пресса. Однако, максимальную производительность робота (наибольшее число циклов работы в минуту) можно получить при любой длине руки при определенном угле поворота руки, что в каждом случае будет определяться размерами штампа. Ввиду того, что кривошип и коромысло в роботе не имеют возможности регулироваться по длине, отсутствует возможность настройки робота на оптимальный режим работы, что сни жает производительность робота. Цель изобретения - повышение производительности робота. Поставленная цель достигается тем, что коромысло установлено на валу с возможностью регулировочного перемещения относительно него, в кронштейне вьшолнены пазы, а координаты точек, лежащих на оси каждого паза, определяются зависимостьюX ±(L-l)(3/Z; Y (L-I)cos(/2; где X - расстояние точки, лежащей на оси паза, от оси вала вдо оси, проходящей через вал перпендикулярно его оси; У - расстояние точки, лежащей на оси паза,от оси вала вдоль л оси, проходящей через ось вала перпендикулярно оси X; L - длина коромысла; 1 - длина конца коромысла от ос вала до соединения его с ша туном; (5 - угол поворота коромысла, а ловители установлены в пазах с во можностью регулировочного перемещения по ним. На фиг. 1 и 2 изображена кинемат ческая схема описываемого робота. Робот к листоштамповочному пресс содержит смонтированный на станине (не изображена) вертикальный подъем но-поворотный вал 1, на одном из концов которого жестко закреплена рука 2 с захватом 3, дисковый кулач 4, связанный с приводом (не изображ На станине робота шарнирно закрепле двуплечий рычаг 5, взаимодействукш и одним концом с дисковым кулачком 4. Другой конец рычага 5 щарнирно связ с валом 1. Поворот вала 1 вокруг оси осущес вляется от привода через кривсшип 6 шатун 7 и коромысло 8. На конце коромысла 8 закреплен фиксатор 9. Сам коромысло установлено в отверстии, полненном в валу 1, и фиксируется относительно вала 1 гайками 10, установленными на коромысле 8 по обе стороны- вала 1. На станине робота смонтированы ловители 11, которые крепятся на кр штейне 12 с возможностью перемещения по пазам 13, выполненным в крон штейне 12. Координаты пазов точек по осевым линиям 14 и 15 соответствуют зависимостиX ± (L-1 ) S inA/2; Y (L-l)cosp/2; где У - расстояние ловителя (точек лежащих на оси паза) от оси вала 1 вдоль оси, проходяще через ось вала 1; X - расстояние (точек, лежащих на оси паза) ловителя от оси вала 1 вдоль оси, проходящей через ось вала 1 перпендикулярно оси У; I - длина коромысла от шарнирного соединения с шатуном 7 до оси вала 1; L т длина коромысла; - угол поворота коромысла. Оси X и .У расположены в плоскости, перпендикулярной оси вала 1. Шатун 7 снабжен демпфером 16. Кулачок 4 и двуплечий рычаг 5 образуют механизм подъема вала 1, а шатун 7, кривошип б и коромысло 8 образуют четырехзвеннйй механизм поворота вала 1 вокруг его оси. Робот к листоштампованному прессу работает следующим образом. При реверсивном вращении кулачка . 4 от привода на угол (Х в результате взаимодействия его с двуплечим рычагом 5 механизма подъема и четырехзвенным механизмом поворота происходит последовательный подъем руки поворот и опускание. При подъеме руки фиксаторы 9 выходят из контакта с ловителями 11. . Для настройки робота на оптимальные режимы по производительности (числу циклов рабочих в минуту) длина коромысла 8 с помощью контргаек 10 относительно оси вала 1 может быть изменена в сторону увеличения или уменьшения, этим самым изменяется угол поворота руки 2, и, следовательно, величина перемещения детали, скорость перемещения и соответственно ускорения и инерционные нагрузки. С изменением радиуса коромысла 8 изменяется и радиус положения фиксатора 9, Дпя согласования фиксатора 9 с ловителями 11 последние достаточно переставить по пазам 13. Технико-экономический эффект предлагаемого манипулятора заключается в повьвиеник производительности за счет возможности настройки оптимального угла поворота руки. Формула изобретения Робот к листоштамповочному прессу, содержащий смонтированный на станине и несущий руку с захватом вертикальный вал, приводимый в.возвратнопоступательное движение от приводного вала через закрепленный на нем кулачок и шарнирно закрепленный на станине двуплечий рычаг, и приводимый в возвратно-вращательное движение от приводного вала через кривошип, шатун с демпферным устройством и коромысло с фиксатором, поочередно взаимодействующим с ловителями , установленными на кронштейне, закрепленном на станине, о тличающийся тем, что, с целью повышения производительности, коромысло установлено на валу с возможностью регулировочного перемещения относительно него, в кронштейне выполнены пазы, а координаты точек, лежгицих на оси каждого паза, определяются зависимостью X ±(L--l)sinft/2-, У (L-l)cos,/2-, где X - расстояние точки, лежащей н оси паза, от оси вала вдоль оси, проходящей через вал перпендикулярно его оси; У - расстояние точки, лежащей на оси паза, от оси вала вд
ОС оси, перпендикулярной оси и проходящей через ось вала; L - длина коромысла; 1 - длина конца коромысла от оси вала до лочки соединения его с шатуном; (5 - угол поворота коромысла, а ловители установлены в пазах с возможностью регулировочного перемещения по ним. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2520871/25-27, кл. В 21 D 43/00, 24,08.77 (прототип) ,
