Изобретение относится к области крано-манипуляторных установок и других грузоподъемных машин со стреловым оборудованием и может быть использовано при оценке прочности элементов конструкции входящих в их состав навесных грузозахватных устройств грейферного типа и выборе их материала, геометрических, массово-инерционных и силовых параметров.
Указанные грузозахватные устройства представляют собой шарнирно подвешиваемые на конце стрелы крано-манипуляторной установки специальные гидрофицированные механизмы с двумя поворачивающимися вокруг своих осей челюстями, используемыми для дистанционного захвата длинномерных материалов, типа сортиментов либо хлыстов, удержания их при переносе в пространстве и разгрузки в местах складирования.
Проектирование грейферов, и в частности оценка их прочности при выборе материала, геометрических, массово-инерционных и силовых параметров, во многом зависит от уровня соответствующих динамических сил и моментов, передаваемых на грейфер в процессе выполнения указанных операций, и характера совместного действия их на него.
Один из наиболее тяжелых видов нагружения перемещаемого в пространстве грейфера с удерживаемым его челюстями сортиментом реализуется при резком изменении скорости движения стрелы крано-манипуляторной установки в окружном направлении, осуществляемом посредством соответствующего поворота колонны вокруг собственной оси с последующим экстренным ее остановом, когда сортимент ориентирован по касательной к траектории его движения.
При такой ориентации сортимента в момент экстренного останова колонны могут иметь место достаточно большие колебания его относительно точки подвеса грейфера на конце стрелы в вертикальной плоскости, проходящей через продольную ось сортимента, приводящие к его нагружению инерционным моментом, обусловленным особенностями перемещаемого груза и зависящим от собственного момента инерции последнего относительно поперечной оси. Особенностью указанного момента является то, что он действует только на грейфер и практически не передается на конструкцию крано-манипуляторной установки. Помимо этого на грейфер передается и соответствующая центробежная сила, зависящая от тех же параметров, что и инерционный момент, и действующая совместно с ним.
Из отечественной и зарубежной технической литературы и других информационных источников известен ряд экспериментальных и расчетно-аналитических способов определения динамических нагрузок, действующих в условиях эксплуатации на элементы конструкции крано-манипуляторных установок и других грузоподъемных машин при резком изменении скорости движения стрелы с подвешенным на ней грузом (см., например, "Справочник по кранам", т.1, 2, под общ. ред. д-ра техн. наук проф. М.М. Гохберга, М., «Машиностроение», 1988, ББК 34.42Я2, С 74, УДК 621.873(031), ББК 39.12Я2, С 74, УДК 621.873/.875(031); "Вероятностные методы расчета грузоподъемных машин", авт. Б.И. Брауде, Л., «Машиностроение», Ленинградское отделение, 1978, УДК 519.241.2:621.873/.875; "Теория, конструкция и расчет строительных и дорожных машин", под ред. Л.А.Гобермана, М., «Машиностроение», 1979; пат. RU 2133453, G 01 L 1/00, В 66 С 23/86, 20.07.99 г.; RU 2159415, G 01 L 1/00, В 66 С 23/86, 20.11.2000 г.; RU 2194258, G 01 L 1/00, 5/00, 10.12.2002 г. и др.).
Однако многие из них сложны и трудоемки в реализации. И, практически, во всех из перечисленных аналогов рассматриваются соответствующие перемещения стрелы крано-манипуляторной установки, либо другой грузоподъемной машины подобного типа, с подвешенным на ней при помощи гибкого звена грузом обычных размеров (малой длины).
Из числа известных аналогов изобретения ближайшим (прототипом) является способ определения динамических нагрузок, а именно соответствующих сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом малой длины, основанный на использовании аналитических зависимостей, связывающих параметры элементов конструкции с уровнем определяемых нагрузок (см. пат. RU 2133453, G 01 L 1/00, В 66 С 23/86, 20.07.99 г.).
Однако прототип не позволяет определить инерционный момент, так как в нем не рассматриваются длинномерные грузы. Кроме того, величина вертикальной динамической силы не связывается с параметрами углового движения поворотной колонны крано-манипуляторной установки и соответствующими геометрическими размерами (длиной) груза, а определяется только по фактическим (замеренным) значениям вертикальной скорости груза и жесткости стрелы. Поскольку в прототипе не затрагивается проблема определения передаваемых на элементы конструкции крано-манипуляторной установки, и в частности на грейфер, динамических моментов, то он, естественно, имеет несколько ограниченные возможности применения на практике.
Задачей настоящего изобретения является устранение недостатков прототипа, а именно расширение возможностей применения заявленного способа определения действующих на элементы конструкции крано-манипуляторной установки, и в частности на грейфер, при резком изменении скорости движения стрелы с перемещаемым в окружном направлении при повороте колонны установки вокруг собственной оси с последующим ее экстренным торможением длинномерным грузом сортиментного типа, динамических сил и моментов, основанного на использовании аналитических зависимостей, связывающих их соответствующие геометрические, массово-инерционные и кинематические параметры с уровнем определяемых сил и моментов.
В соответствии с изобретением поставленная задача достигается тем, что согласно заявляемому способу определения динамических нагрузок, а именно соответствующих сил и моментов, действующих на элементы конструкции крано-манипуляторной установки при резком изменении скорости движения ее стрелы с подвешенным на ней грузом, реализуемом, преимущественно, при экстренном останове поворотной колонны установки, заключающемуся в использовании аналитических зависимостей, связывающих их соответствующие геометрические, массово-инерционные и кинематические параметры с величиной определяемых сил и моментов, для случая удержания перемещаемого в окружном направлении длинномерного груза типа сортимента, при помощи грейферного грузо-захватного устройства, когда груз ориентирован по касательной к траектории его движения, геометрические и массово-инерционные параметры определяют расчетным путем либо посредством соответствующих измерений, предварительно с учетом текущих значений угловой скорости колонны и времени ее поворота графически определяют максимальное значение угловой скорости колонны перед ее торможением и время снижения указанной скорости на участке торможения, а максимальные и текущие значения динамических силы и момента, передаваемых на грузозахватное устройство, определяют по соответствующим аналитическим зависимостям, приведенным ниже по тексту.
Достижению поставленной задачи способствует также то, что при определении угловой скорости колонны и времени снижения указанной скорости на участке торможения согласно заявляемому способу используют груз, эквивалентный по массе длинномерному.
Сущность изобретения поясняется чертежами, где изображены:
На фиг.1 - общий вид крано-манипуляторной установки со стрелой, оснащенной двухчелюстным грейфером, удерживающим груз типа сортимента при перемещении его в окружном направлении посредством соответствующего поворота колонны установки вокруг собственной оси с последующим ее экстренным остановом (О - точка подвеса грейфера на конце стрелы, L - вылет стрелы в м, l - длина груза в м, ω - угловая скорость поворотной колонны установки в с-1, МT - тормозной момент колонны в Н·м, А - начало торможения колонны, Б - останов колонны);
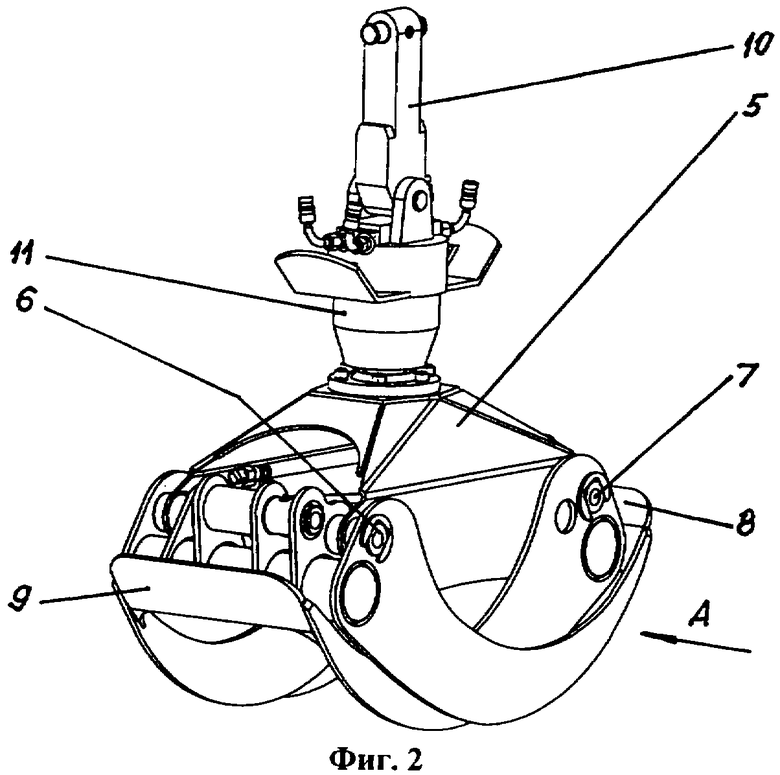
На фиг.2 - общий вид двухчелюстного грейфера с сомкнутыми челюстями (аксонометрическая проекция);
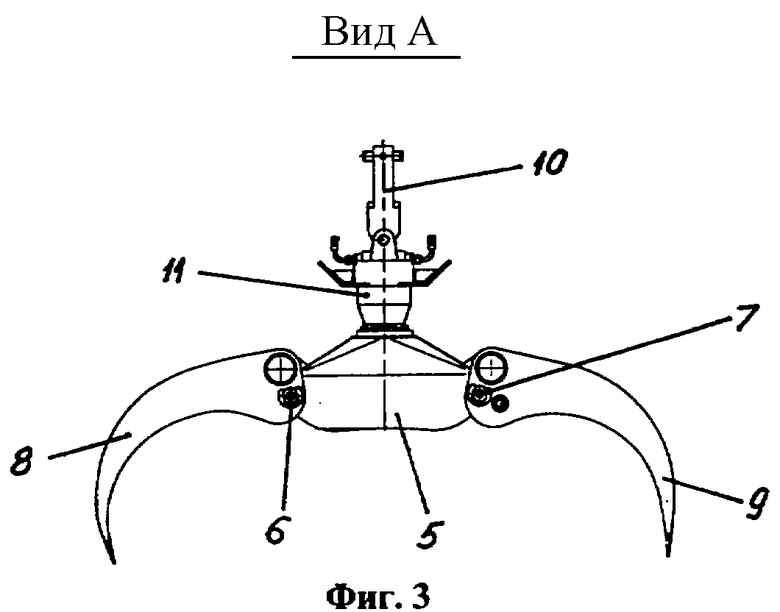
На фиг.3 - вид А спереди на грейфер с разомкнутыми челюстями (ортогональная проекция);
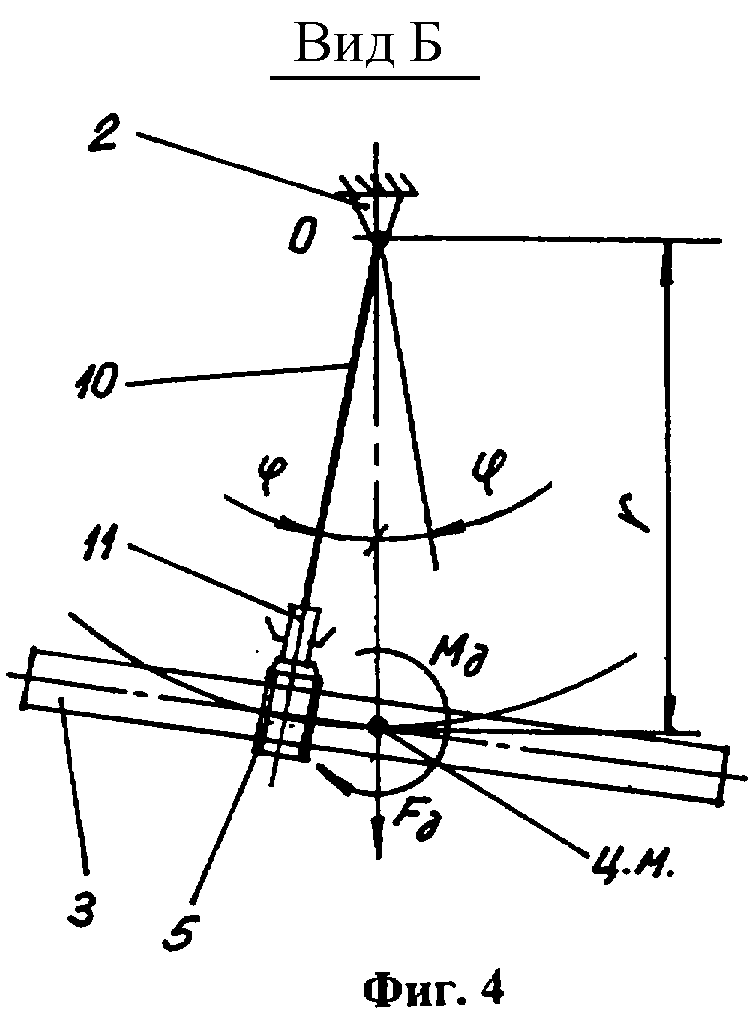
На фиг.4 - вид Б спереди на стрелу (схема, поясняющая характер совместного действия на грейфер динамических силы и момента, реализуемых при перемещении удерживаемого им сортимента на участке торможения поворотной колонны крано-манипуляторной установки, О - точка подвеса грейфера на конце стрелы, L - вылет стрелы в м, r - длина подвеса грейфера (груза) в м, ϕ - угловое перемещение груза относительно точки подвеса О в рад, ц.м. - центр масс сортимента, F∂ - динамическая сила, действующая на грейфер, в Н, М∂ - динамический момент, действующий на грейфер, в Н·м);
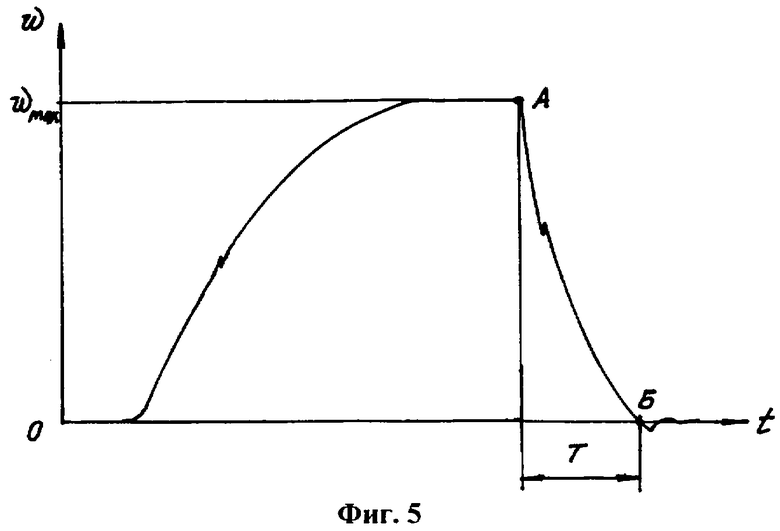
На фиг.5 - кривая, поясняющая характер изменения угловой скорости ω поворотной колонны крано-манипуляторной установки с момента трогания ее до момента останова при экстренном торможении (t - текущее время, с; ω - угловая скорость поворотной колонны крано-манипуляторной установки, с-1; А - начало торможения поворотной колонны; Б - останов поворотной колонны; ωmax - максимальное значение угловой скорости поворотной колонны перед ее торможением, с-1; Т - время снижения угловой скорости поворотной колонны на участке торможения, с).
Заявляемый способ определения динамических нагрузок, а именно соответствующих сил и моментов, действующих на элементы конструкции крано-манипуляторной установки 1 при резком изменении скорости движения ее стрелы 2 с подвешенным на ней грузом 3, реализуемом, преимущественно, при экстренном останове поворотной колонны 4 установки, заключается в использовании аналитических зависимостей, связывающих их соответствующие геометрические, массово-инерционные и кинематические параметры с величиной определяемых сил и моментов.
В соответствии с заявляемым способом для случая удержания перемещаемого в окружном направлении длинномерного груза 3 типа сортимента, при помощи грейферного грузозахватного устройства 5, когда груз ориентирован по касательной к траектории его движения, геометрические и массово-инерционные параметры определяют расчетным путем либо посредством соответствующих измерений (см. «Основы метрологии и электрические измерения»: Учебник для вузов, Б.Я. Авдеев и др., 6-е изд, перераб. и доп. - Л.: «Энергоатомиздат», Ленингр. Отд-ние, 1987, стр.455-457; «Лазерные и оптические методы контроля в самолетостроении», Е.Т. Вагнер и др., М.: «Машиностроение», 1977; «Взаимозаменяемость, стандартизация и технические измерения», 5-е изд., перераб. и доп. М.: «Машиностроение», 1979, стр.83, 84; «Справочник по математике», А.А. Рывкин и др., изд. 3-е, стереотипное, М.: «Высшая школа», 1975, стр.196, пат. RU 2133453, G 01 L 1/00, В 66 С 23/86, 20.07.99 г. - применительно к определению геометрических параметров, характеризующих линейные размеры соответствующих элементов конструкции крано-манипуляторной установки, перемещаемого груза и его подвеса, например, таких как вылет стрелы указанной установки, длина, диаметр и объем груза, а также длина подвеса последнего и «Справочник по физике» для инженеров и студентов вузов, Б.М. Яворский, А.А. Детлаф, изд. 2-е, испр., М.: «Наука», 1964, стр.35, 65 и 66; «Словарь-справочник по механизмам», Крайнев А.Ф., изд. 2-е, перераб. и доп. М.: «Машиностроение», 1987, стр.226; «Краткий курс теоретической механики», Тарг С.М., изд. 7-е, стереотипное, 1970, стр.333, 334, 335, 337, 338 и 394; «Физический энциклопедический словарь», М.: «Советская энциклопедия», 1984, стр.437 - применительно к определению массово-инерционных параметров).
После этого предварительно с учетом текущих значений угловой скорости колонны 4 крано-манипуляторной установки 1 и времени ее поворота графически определяют максимальное значение угловой скорости колонны перед ее торможением и время снижения указанной скорости на участке торможения АВ (см. фиг.5).
Максимальные и текущие значения динамических силы и момента, передаваемых на грузозахватное устройство, определяют по приведенным ниже по тексту аналитическим зависимостям.
Захват и удержание груза 3 типа сортимента в процессе перемещения его в окружном направлении (см. фиг.1-3) осуществляются двумя поворачивающимися вокруг своих осей 6, 7 челюстями 8, 9 грейфера 5, шарнирно подвешенного при помощи тяги 10 на конце стрелы 2 крано-манипуляторной установки 1 через специальное поворотное устройство 11 (ротатор), представляющее собой гидродвигатель поворотного действия с ограниченным или бесконечным углом его выходного вала, жестко скрепляемого с корпусом грейфера.
Для случая перемещения указанного груза 3 в окружном направлении, осуществляемого посредством соответствующего поворота колонны 4 крано-манипуляторной установки 1 с закрепленной на верхнем конце ее стрелой 2, когда груз ориентирован по касательной к траектории его движения, дифференциальное уравнение движения груза относительно точки подвеса имеет следующий вид:

где J - момент инерции груза относительно точки подвеса, кг·м2;
J=Jс+mгрr2;
 - угловое ускорение груза относительно точки подвеса, с-2;
- угловое ускорение груза относительно точки подвеса, с-2;
Jc - собственный момент инерции груза (сортимента) относительно поперечной оси, проходящей через его центр масс;
mгр - масса груза, кг;
g - ускорение свободного падения, м/с2;
r - длина подвеса груза, м (см. фиг.4);
ϕ - угловое перемещение груза относительно точки подвеса, рад (см. фиг.4);
L - вылет стрелы, м (см. фиг.4);
l - длина груза, м;
ε - угловое замедление колонны в процессе торможения, с-2;
Т - время снижения угловой скорости колонны на участке торможения, с;
t - текущее время, с.
На фиг.5 приведена типичная запись изменения текущей угловой скорости колонны во времени при торможении колонны с грузом, эквивалентным по массе длинномерному. В этом случае изменение указанной угловой скорости по времени может быть аппроксимировано выражением:

где ω(t) - текущая угловая скорость поворотной колонны, с-1;
ωmax - максимальное значение угловой скорости колонны перед ее торможением, с-1.
Решение, посредством интегрирования, дифференциального уравнения движения (1) при замене ε его значением из выражения (2), позволяет получить соответствующие аналитические зависимости для определения действующих на грейфер динамической силы (в вертикальном направлении) и момента для любых из их промежуточных (не экстремальных) значений

где F∂ - текущая или переменная динамическая сила, H;
М∂ - текущий или переменный динамический момент, Н·м;

μ - коэффициент динамичности или соответствующего увеличения центробежной силы с учетом колебаний стрелы;
 - угловая скорость груза относительно точки подвеса, с-1.
- угловая скорость груза относительно точки подвеса, с-1.
Применительно к рассматриваемому случаю максимальное значение указанного коэффициента μ для внешней силы в виде полуволны синусоиды принято равным 1,75.
Тогда максимальные значения вышеуказанных динамических сил и моментов составят соответственно:
Момент относительно точки подвеса груза на стреле (точка О, фиг.1,4).
где G - вес груза, Н.
Это однозначно подтверждает то, что момент не передается на другие элементы конструкции крано-манипуляторной установки.
Ниже по тексту в табличной форме приведены определенные по вышеуказанным аналитическим зависимостям (5) и (6) максимальные значения F∂max и M∂max для режимов нагружения, соответствующим трем значениям масс и вылетов стрелы одной из разрабатываемых ЗАО "НК Уралтерминалмаш" крано-манипуляторных установок. При вычислениях использовались следующие данные:
l=6м, r=1,5м, ωmax=0,44с-1, T=0,5с.
При полученных моментах уровень динамических сил и моментов, действующих на грейфер, превышает усилия от веса груза более чем на 40%.
Из выражений (3) и (4) для динамической силы и момента следует, что максимум динамической силы достигается при равенстве нулю момента, и наоборот.
Определенные в соответствии с заявляемым способом по вышеперечисленным аналитическим зависимостям динамические силы и моменты, действующие на грейфер, в последующем используются при выборе материала, геометрических размеров и массово-инерционных параметров металлоконструкции основных несущих элементов и силовых характеристик его гидропривода, а также выполнении соответствующих прочностных расчетов.
Предлагаемый способ определения вышеуказанных динамических сил и моментов несложен в реализации и не требует больших материальных затрат. В практическом плане он апробирован при создании ЗАО "НК Уралтерминалмаш" одного из опытных образцов двухчелюстного грейфера для погрузки и разгрузки длинномерных материалов.
Проведенные ЗАО "НК Уралтерминалмаш" при создании указанного грейфера расчетно-теоретические и экспериментальные работы подтверждают возможность получения при осуществлении изобретения вышеупомянутого технического эффекта, заключающегося в расширении возможностей применения заявленного способа определения действующих на элементы конструкции крано-манипуляторной установки, и в частности на грейфер, при резком изменении скорости движения стрелы с перемещаемым в окружном направлении при повороте колонны установки вокруг собственной оси с последующим ее экстренным торможением длинномерным грузом сортиментного типа, динамических сил и моментов, основанного на использовании аналитических зависимостей, связывающих их соответствующие геометрические, массово-инерционные и кинематические параметры с величиной определяемых сил и моментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 2000 |
|
RU2194258C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ И СКОРОСТИ ПЕРЕМЕЩЕНИЯ ГРУЗА ПО ТРЕБУЕМОЙ ТРАЕКТОРИИ ГРУЗОПОДЪЕМНЫМ КРАНОМ МОСТОВОГО ТИПА | 2014 |
|
RU2564560C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 1999 |
|
RU2159415C2 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| СИСТЕМА РЕГИСТРАЦИИ МАССЫ ГРУЗА, ВИСЯЩЕГО НА ПОДЪЕМНОМ КАНАТЕ КРАНА | 2010 |
|
RU2537728C2 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
Изобретение относится к области крано-манипуляторных установок и других грузоподъемных машин со стреловым оборудованием и может быть использовано при оценке прочности элементов конструкции входящих в их состав навесных грузозахватных устройств грейферного типа и выборе их материала, геометрических, массово-инерционных и силовых параметров. Способ заключается в использовании аналитических зависимостей, связывающих геометрические, массово-инерционные и кинематические параметры элементов конструкции крано-манипуляторной установки и груза с величиной определяемых сил и моментов. Технический результат заключается в повышении точности определения динамических нагрузок, действующих на элементы конструкции крано-манипуляторной установки при работе с длинномерными грузами. 1 з.п. ф-лы, 5 ил., 1 табл.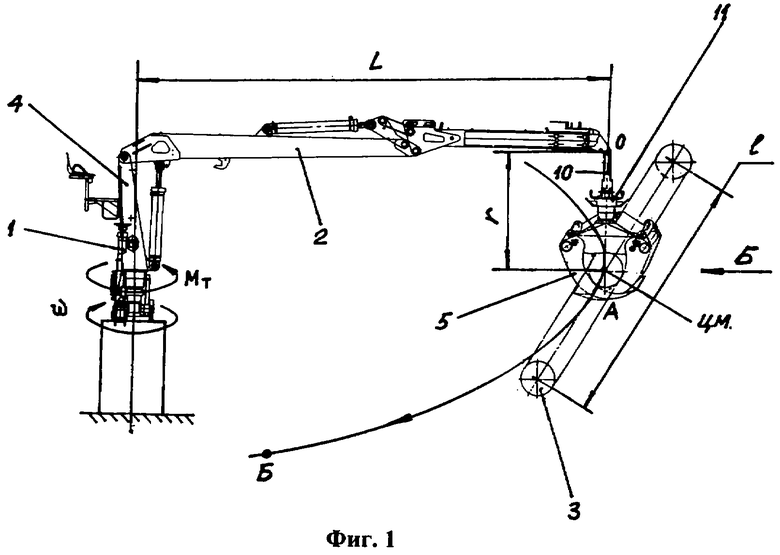





где F∂ - текущая или переменная динамическая сила, Н;
M∂ - текущий или переменный динамический момент, Н·м;
F∂max - максимальное значение динамической силы, Н;
∂max - максимальное значение динамического момента, Н·м;
L - вылет стрелы, м;
μ - коэффициент динамичности или соответствующего увеличения центробежной силы с учетом колебаний стрелы;
 - угловая скорость груза относительно точки подвеса, с-1;
- угловая скорость груза относительно точки подвеса, с-1;
 - угловое ускорение груза относительно точки подвеса, с-2;
- угловое ускорение груза относительно точки подвеса, с-2;
L - вылет стрелы, м;
ωmax - максимальное значение угловой скорости поворотной колонны перед ее торможением, с-1,
 - масса груза, кг;
- масса груза, кг;
r - длина подвеса груза, м;
Т - время снижения угловой скорости колонны на участке торможения, с;
 - ускорение земного тяготения, м/с2;
- ускорение земного тяготения, м/с2;
J - момент инерции груза относительно точки подвеса, 

Jc - собственный момент инерции груза (сортимента) относительно поперечной оси, проходящей через его центр масс, 

 -длина груза, м;
-длина груза, м;

 - текущее время, с;
- текущее время, с;
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |

