Изобретение относится к области гидроманипуляторной техники и других грузоподъемных машин со стреловым оборудованием и может быть использовано при оценке прочности элементов конструкции, динамической устойчивости, эксплуатационных возможностей и безопасности в целом машин указанного класса.
Указанные оценки обычно осуществляются расчетно-аналитическим путем, либо базируются на результатах экспериментального определения динамических сил, реализуемых в конструкции стреловых гидроманипуляторов в периоды неустановившегося движения, например, при экстренном торможении опускаемого, либо перемещаемого в поперечном направлении, груза.
Из технической литературы известны методы расчетного и экспериментального определения динамических сил, действующих в условиях эксплуатации на элементы конструкции стреловых гидроманипуляторов и других грузоподъемых машин (см., например, "Справочник по кранам", том 1, 2, под общей редакцией д-ра техн. наук проф. М. М. Гохберга, М., "Машиностроение", 1988 г. ББК 34.42Я2. С74, УДК 621.873/.875 (031); "Теория, конструкция и расчет строительных и дорожных машин". Под редакцией Л.А. Гобермана. М., "Машиностроение", 1979 г.; "Динамика мостовых кранов", авт. Казак С.А., М., "Машиностроение", 1968 г. ; "Динамика грузоподъемных машин", авт. Катаров М.С., Москва-Киев, "Машгиз", 1962 г. ; "Динамика грузоподъемных кранов", авт. Н.А. Лобов, М., "Машиностроение", 1987 г. и др.).
При этом характерным для большинства из указанных известных методов является общий подход, при котором основные параметры элементов конструкции машин, влияющие на динамические нагрузки, при выполнении вышеупомянутых оценок берутся, как правило, в их наихудшем сочетании и по максимальным величинам.
На практике это приводит к необходимости повышения прочности ряда элементов конструкции машин с существенным изменением в ряде случаев их исполнения и весового совершенства.
Из числа известных аналогов изобретения ближайшим (прототипом) может служить способ определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом по пат. RU 2133453, G 01 L 1/00, В 66 С 23/86, за 1999 год, основанный на использовании аналитических зависимостей, связывающих параметры элементов конструкции с уровнем определяемых нагрузок.
В соответствии с указанным известным способом в качестве параметров элементов конструкции гидроманипулятора используют предварительно определенные экспериментально фактические значения их массовых, геометрических, жесткостных и скоростных характеристик, а динамические силы определяют по соответствующим аналитическим зависимостям.
Однако и этому известному способу присущи те же самые недостатки, обусловленные вышеупомянутыми подходами, используемыми при оценках прочности элементов конструкции, динамической устойчивости, эксплуатационных возможностей и безопасности гидроманипуляторов в целом.
Так, например, в случае определения по аналитическим зависимостям динамических сил, реализуемых при экстренном торможении опускаемого груза, в качестве соответствующих исходных данных обычно принимают предельные значения грузового момента и скорости перемещения груза, а также максимально резкий характер его торможения (с "бросанием" ручки управления золотника гидрораспределителя). При аналогичном останове поворотной стойки гидроманипулятора учитывают соответственно предельную скорость вращения и максимально резкий характер ее торможения (с "бросанием" ручки управления золотника гидрораспределителя), реализуемый преимущественно на начальном участке работы внутреннего тормозного устройства, встроенного в гидроцилиндр поворота стойки. В этом случае имеют место максимальные значения соответствующих динамических сил.
В реальных условиях эксплуатации гидроманипуляторов все вышеперечисленные параметры элементов конструкции могут меняться в определенных диапазонах случайным образом.
Указанное обстоятельство в равной степени относится и к случаю совмещенного движения, когда происходит одновременное перемещение стрелы с грузом в двух плоскостях (вертикальной и горизонтальной), поскольку при резком торможении рабочий процесс характеризуется динамическими инерционными силами стрелы и груза, имеющими колебательный характер. Поэтому совместное действие амплитуд этих сил, принимаемое в расчетах при совмещенном движении, может быть реализовано только при определенных значениях фаз колебаний в каждой из указанных плоскостей.
Очевидно реализация крайнего случая нагружения конструкции гидроманипулятора при его эксплуатации является крайне редким событием. Это объясняется тем, что такие параметры как скорость движения груза, его масса, силы со стороны гидроцилиндров при торможении груза, момент торможения при повороте стойки, фазы колебаний груза в вертикальной и горизонтальной плоскостях являются случайными величинами.
Редкое событие характеризуется малой вероятностью его появления. Это соответствует избыточно большой вероятности при эксплуатации непревышения нагрузки, рассчитанной по максимальным значениям влияющих на нее параметров.
Указанный вывод может быть проиллюстрирован двумя гипотетическими примерами, в которых известны законы распределения двух случайных величин х и у и зависящей от них функционально случайной величины z:
1) z=x•y
Примем допущение, что х и у случайные величины, распределенные по нормальному закону с нулевыми математическими ожиданиями, а xmax 3σx, ymax = 3σy, где σx, σy - среднеквадратичные отклонения х и у.
Тогда:
распределение случайной величины z реализуется по закону Лапласа;
плотность распределения
функция распределения
где е=2,718 (трансцендентное число)
Дисперсия D[z]=2В2, где B = σx•σy.
Оценки показывают, что при указанных допущениях вероятность непревышения максимальной величины zmax= xmах•ymах, (если х=у) имеет избыточно большую величину (Р= 0,9999), хотя на практике достаточно P(Z<z)=0,99, что соответствует z≈0,5 xmах•ymах.
2) z=x+y, zmах=xmax+ymах,
Допущения те же, что и в предыдущем примере. Закон распределения величины z - нормальный, поэтому величина
имеет вероятность непревышения P(Z<z)≈0,997. В то же время вероятность непревышения P(Z<zmax)≈0,99999..., т.е. имеет еще более избыточно величину, чем в рассмотренном выше примере 1.
Вышеизложенное однозначно подтверждает необходимость учета при определении динамических сил случайного характера влияющих на них параметров.
В связи с этим в ряде известных нормативных документах (например, РД 24.225.03-90. Краны стреловые самоходные. Металлические конструкции. Нормы расчета. М. , ВНИИстройдормаш, 1988 г.) рекомендуется использовать нормативные и случайные составляющие соответствующих нагрузок. При этом случайные составляющие определяются с помощью различного рода коэффициентов, зависящих от группы режима работы крана и от других аналогичных параметров (например, от класса ответственности крана) и никак не связаны с конструктивными и схемными особенностями крана.
В "Справочнике по кранам" (т. 1, под общей ред. д-ра техн. наук, проф. М. М. Гохберга, М., "Машиностроение", 1968 г.) приводятся данные по коэффициентам, позволяющим определить математическое ожидание [R] и среднеквадратичное отклонение σR эксплуатационных нагрузок для плавучих и портальных кранов, если известна максимальная нагрузка для экстремальных режимов эксплуатации крана.
Там же отмечено, что характеристики [R] и σR могут быть определены посредством соответствующих расчетов на ЭВМ процесса нагружения за время одного типового цикла работы крана. При этом для определения нагрузок по типовому циклу составляется расчетная схема крана или механизма и соответствующие ей дифференциальные уравнения движения, которые решаются на ЭВМ. Результаты решения дифференциальных уравнений также обрабатываются на ЭВМ и используются для расчета вероятности безотказной работы крана при однократном нагружении.
Для определения подобных характеристик для стреловых гидроманипуляторов потребуется проведение большого объема вычислительных работ и соответствующего времени. Помимо этого, для их проведения необходимы данные по типовому циклу работы гидроманипулятора.
Задачей настоящего изобретения является оптимизация способа определения действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом динамических сил, используемых при соответствующих прочностных расчетах, с обеспечением снижения их до уровня, позволяющего избежать излишнего переутяжеления конструкции и существенно повысить скоростные характеристики указанных гидроманипуляторов.
В соответствии с изобретением поставленная задача достигается тем, что вышеупомянутые динамические силы определяют по соответствующим аналитическим зависимостям с учетом случайного характера входящих в них параметров элементов конструкции стрелового гидроманипулятора.
Сущность изобретения поясняется чертежом, где изображены
на фиг. 1 - схема, иллюстрирующая опускание груза с последующим экстренным торможением;
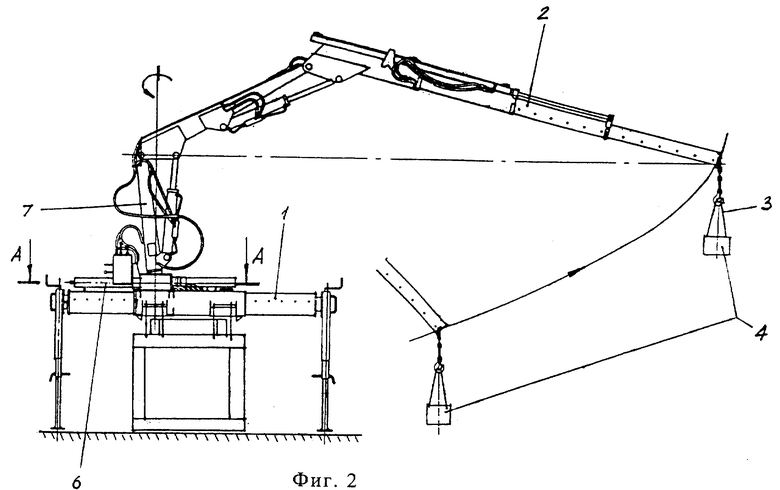
на фиг. 2 - схема, иллюстрирующая поворот груза в горизонтальной плоскости с последующим экстренным торможением его;
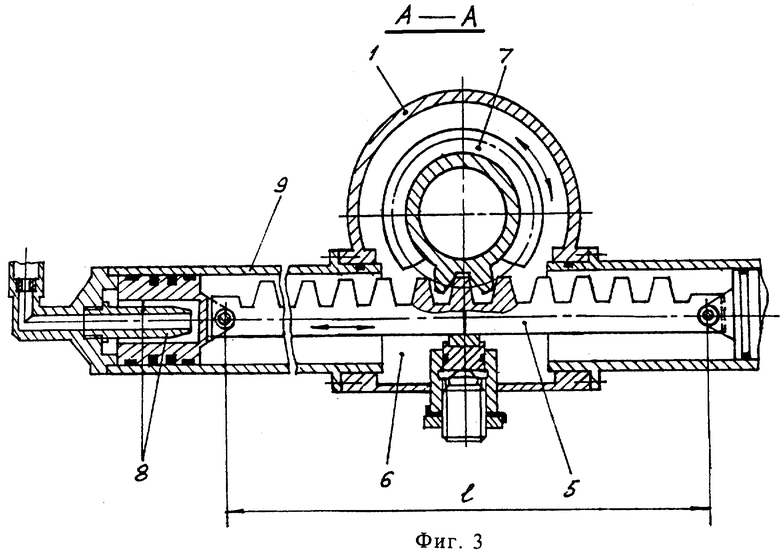
на фиг. 3 - поперечное сечение А-А стрелового гидроманипулятора с изображением механизма поворота стойки (конец работы внутреннего тормозного устройства, встроенного в гидроцилиндр указанного механизма поворота);
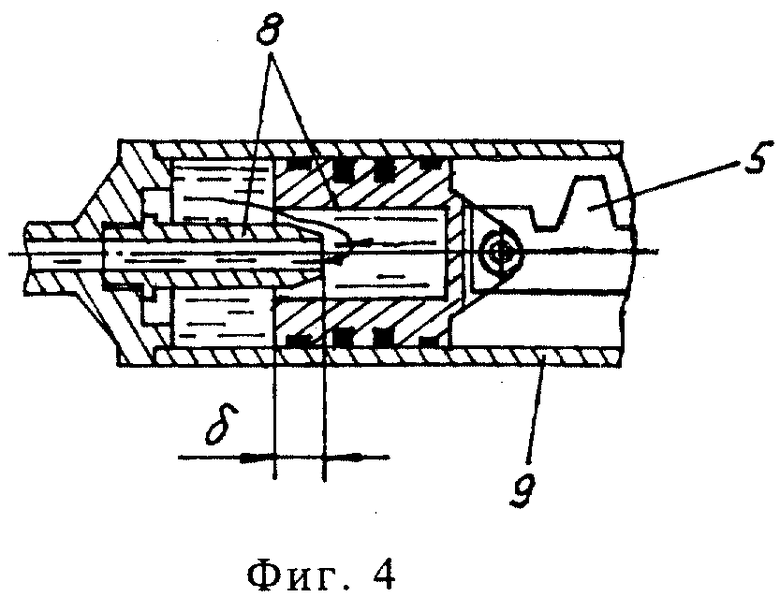
на фиг. 4 - фрагмент механизма поворота стойки стрелового гидроманипулятора (начало работы внутреннего тормозного устройства, встроенного в гидроцилиндр указанного механизма поворота стойки).
Заявляемый способ определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов 1 при резком изменении скорости движения стрелы 2 с подвешенным на ней при помощи гибкого звена 3 грузом 4, основан на использовании аналитических зависимостей, связывающих предварительно определенные фактические значения массовых, геометрических, жесткостных, скоростных и других параметров элементов конструкции с уровнем определяемых нагрузок.
В соответствии с заявляемым способом динамические силы, реализуемые при экстренном торможении опускаемого и перемещаемого в поперечном направлении грузов (см. фиг. 1-4) определяют по следующим аналитическим зависимостям с учетом случайного характера входящих в них параметров элементов конструкции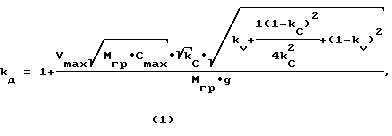
где kд - коэффициент динамичности;
Vmax - максимальное значение скорости груза, определяемое экспериментально, м/с;
Мгр - масса груза с учетом приведенной к грузу массы стрелы, кг;
Cmax - максимальная величина динамической жесткости конца стрелы, определяемая экспериментально, [Cmax= (Мгр•xmax)/x, где х, xmax - замеренные значения соответственно перемещения и ускорения груза при резком торможении с бросанием ручки управления золотником гидрораспределителя, Н/м];
kc - отношение математического ожидания динамической жесткости к ее максимальному значению;
kv - отношение математического ожидания скорости груза к ее максимальному значению;
g - ускорение земного тяготения, м/с2.
Выражение (1) получено из известной формулы для коэффициента динамичности  путем применения процедуры определения матожидания и дисперсии с линеаризацией функции
путем применения процедуры определения матожидания и дисперсии с линеаризацией функции  от случайных величин V и С (Е.С. Вентцель "Теория вероятностей", Наука, 1964 г.).
от случайных величин V и С (Е.С. Вентцель "Теория вероятностей", Наука, 1964 г.).
Матожидания С и V определяются экспериментально путем изменения темпа торможения (для определения С) и величины расхода рабочей жидкости в гидросистеме стрелового гидроманипулятора (для определения V) в пределах, соответствующих условиям эксплуатации, с последующим осреднением полученных данных.
В принципе, матожидания С и V могут быть определены и расчетным путем с соответствующим варьированием влияющих на них параметров и использованием соответствующих экспериментальных данных.
F = Fmax(1-p)•l/δ•(Fmax-Fmin), (2)
где F - усилие на рейке 5 механизма поворота 6 стойки 7 гидроманипулятора, Н;
Fmax, Fmin - определенные экспериментально или соответствующим расчетом с использованием экспериментальных данных максимальное и минимальное значения усилия на рейке 5 при работе внутреннего тормозного устройства 8, встроенного в гидроцилиндр 9 механизма 6 поворота стойки 7 гидроманипулятора 1, Н;
p - заданная или нормативная вероятность непревышения усилия F;
l - общая длина рейки 5, м;
δ - рассогласование между началом работы внутреннего тормозного устройства, встроенного в гидроцилиндр механизма поворота стойки гидроманипулятора и включением внешнего торможения ее посредством резкого бросания управляющей ручки гидрораспределителя (определяет пространственное положение поршня гидроцилиндра относительно игловидного плунжера внутреннего тормозного устройства в момент включения внешнего торможения), м.
Выражение (2) получено с использованием формулы полной вероятности, приведенной, например, в книге "Теория вероятностей", авторы Е.С. Вентцель, П.А. Овчаров, изд. Наука, Москва 1979 г.).
Закон распределения усилия F принят равномерным в диапазоне Fmin-Fmax.
Проведенные ЗАО "НК Уралтерминалмаш" расчетно-теоретические и экспериментальные работы подтверждают возможность получения, при осуществлении изобретения, соответствующего технического эффекта, заключающегося в снижении действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом, динамических сил, используемых при соответствующих прочностных расчетах, до уровня, позволяющего избежать излишнего переутяжеления конструкции и существенно (в 1,5-2 раза) повысить скоростные характеристики указанных гидроманипуляторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 2003 |
|
RU2269751C2 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК | 1999 |
|
RU2159415C2 |
| МОБИЛЬНЫЙ ПЕРЕНОСНОЙ КОПЕР | 2000 |
|
RU2203359C2 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2124446C1 |
| СТОЙКА ПОВОРОТНАЯ ОПОРНО-ПОВОРОТНОГО УСТРОЙСТВА КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2001 |
|
RU2213043C2 |
| ГРУЗОВАЯ ПЛАТФОРМА СОРТИМЕНТОВОЗНОГО КРАНА-МАНИПУЛЯТОРА | 1996 |
|
RU2122498C1 |
| СОРТИМЕНТОВОЗНЫЙ КРАН-МАНИПУЛЯТОР | 1996 |
|
RU2124447C1 |
Изобретение относится к области грузоподъемных машин со стреловым оборудованием и может быть использовано при оценке прочности элементов конструкции, динамической устойчивости, эксплуатационных возможностей и безопасности в целом машин указанного класса. Способ определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом, основан на использовании аналитических зависимостей, связывающих предварительно определенные фактические значения массовых, геометрических, жесткостных, скоростных и других параметров элементов конструкции с уровнем определяемых нагрузок. При этом динамические силы определяют с учетом случайного характера (возможного отклонения от средних значений) входящих в указанные зависимости параметров элементов конструкции, влияющих на уровень нагрузок. Технический результат - повышение достоверности определения динамических сил. 4 ил.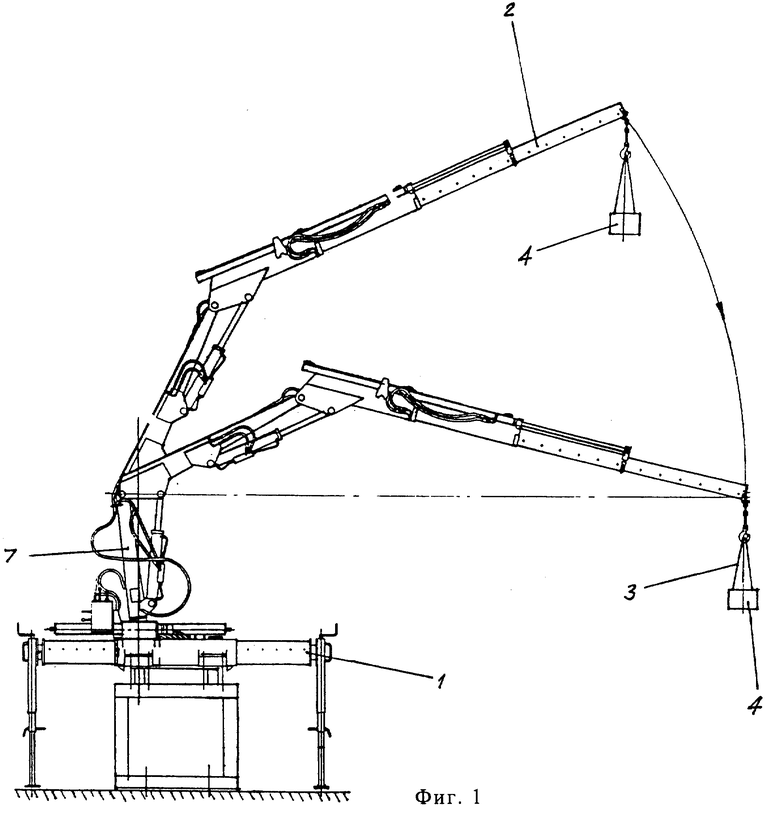
Способ определения динамических сил, действующих на элементы конструкции стреловых гидроманипуляторов при резком изменении скорости движения стрелы с подвешенным на ней при помощи гибкого звена грузом, основанный на использовании аналитических зависимостей, связывающих предварительно определенные фактические значения массовых, геометрических, жесткостных, скоростных и других параметров элементов конструкции с уровнем определяемых нагрузок, отличающийся тем, что динамические силы, реализуемые при экстренном торможении опускаемого и перемещаемого в поперечном направлении груза определяют по следующим аналитическим зависимостям с учетом случайного характера входящих в них параметров элементов конструкции: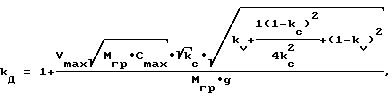
где kд - коэффициент динамичности;
Vmax - максимальное значение скорости груза, определяемое экспериментально, м/с;
Мгр - масса груза с учетом приведенной к грузу массы стрелы, кг;
Сmax - максимальная величина динамической жесткости конца стрелы, определяемая экспериментально [Cmax= (Мгр•хmax)/х, где x, хmax - замеренные значения соответственно перемещения и ускорения груза при резком торможении с бросанием ручки управления золотником гидрораспределителя, Н/м] ;
kc - отношение математического ожидания динамической жесткости к ее максимальному значению;
kv - отношение математического ожидания скорости груза к ее максимальному значению;
g - ускорение земного тяготения, м/с2;
F = Fmax(1-p)•l/δ•(Fmax-Fmin),
где F - ускорение на рейке 5 механизма поворота 6 стойки 7 гидроманипулятора, Н;
Fmax и Fmin - определенные экспериментально или соответствующим расчетом с использованием экспериментальных данных максимальные и минимальные значения усилия на рейке при работе внутреннего тормозного устройства, встроенного в гидроцилиндр механизма поворота стойки гидроманипулятора, Н;
р - заданная или нормативная вероятность непревышения усилия F;
l - общая длина рейки, м;
δ - рассогласование между началом работы внутреннего тормозного устройства, встроенного в гидроцилиндр механизма поворота стойки гидроманипулятора, и включением внешнего торможения ее посредством резкого бросания управляющей ручки гидрораспределителя (определяет пространственное положение поршня гидроцилиндра относительно игловидного плунжера внутреннего тормозного устройства в момент включения внешнего торможения), м.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИЛ | 1997 |
|
RU2133453C1 |
| RU 99100199 А, 20.10.2000 | |||
| RU 97113348 А, 20.06.1999. | |||

