Изобретение относится к измерительной технике и может быть использовано для бесконтактного автоматического контроля параметров движения лопаток ротора турбомашины в процессе испытаний и эксплуатации.
Известен способ измерения зазоров между статором и торцами лопаток ротора, основанный на возбуждении переменным магнитным полем вихретокового преобразователя в зоне измерения зазора и фиксация максимальных значений измеряемых сигналов преобразователей в момент прохождения лопаток центра преобразователя [А.с. СССР N 1201672, МПК G 01 В 7/08, 1984].
Недостатком указанного способа является низкая чувствительность и точность измерения, что объясняется ограничением на величину электрической мощности, "прикладываемой" к преобразователю вследствие непрерывного возбуждения электромагнитного поля в зоне измерения зазора.
Наиболее близким по технической сущности к предлагаемому изобретению является способ измерения радиальных зазоров в турбомашинах, заключающийся в том, что с торцами лопаток работающей турбомашины вводят во взаимодействие синхронизированный с ее вращением вихретоковый преобразователь, возбуждаемый последовательностями из групп импульсов, и по его сигналам оценивают радиальные зазоры между лопатками и указанным преобразователем [А.с. СССР N 1779908, МПК G 01 В 7/08, 1992].
Недостатком известного способа являются низкая точность и информативность измерения из-за невозможности учета влияния осевого смещения лопаток ротора турбомашины.
Предлагаемое изобретение решает задачу повышения точности и информативности измерения параметров движения лопаток ротора турбомашины, что позволит оптимизировать элементы ее конструкции и, следовательно, создавать более экономичные образцы турбомашин.
Поставленная задача решается так, что в известном способе, заключающемся в том, что с торцами лопаток работающей турбомашины вводят во взаимодействие синхронизированный с ее вращением вихретоковый преобразователь, возбуждаемый последовательностями из групп импульсов, выбираемых по числу лопаток в колесе турбомашины, а число импульсов в каждой группе выбирают из условия допустимой неравномерности огибающей выходного сигнала вихретокового преобразователя, и по его сигналам оценивают радиальные зазоры между лопатками и указанным преобразователем, введен дополнительный преобразователь, преобразователи размещают на таком расстоянии вдоль оси турбомашины, когда при всех возможных осевых смещениях контролируемый торец лопатки не выходит из зоны чувствительности каждого преобразователя; учитывая конечные размеры преобразователей, второй преобразователь смещают по образующей статора относительно первого; возбуждают первый и второй преобразователи последовательностями импульсов, причем последовательность импульсов для второго преобразователя смещают на время, определяемое оборотами ротора турбомашины и углом смещения между преобразователями; по найденным значениям выходных сигналов обоих преобразователей путем решения системы двух уравнений, полученных на основе семейств градуировочных характеристик преобразователей, определяют значения радиального зазора и осевого смещения.
На фиг. 1 представлена схема, поясняющая размещение преобразователей на статоре турбомашины, где показаны лопатки 1 и 2, установленные на колесе ротора 3, преобразователи 4 и 5, размещенные на статоре 6, датчик синхронизации 7, метка 8 на валу 9 ротора.
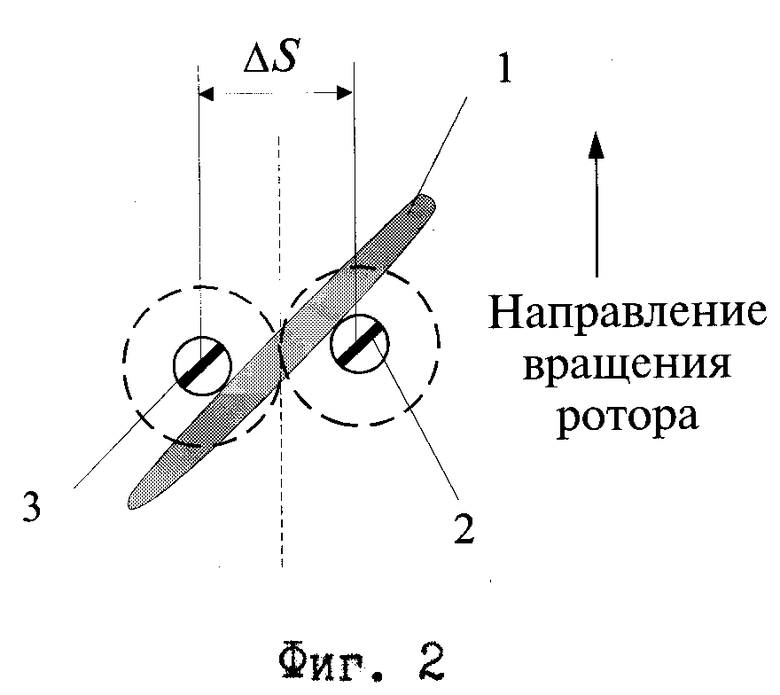
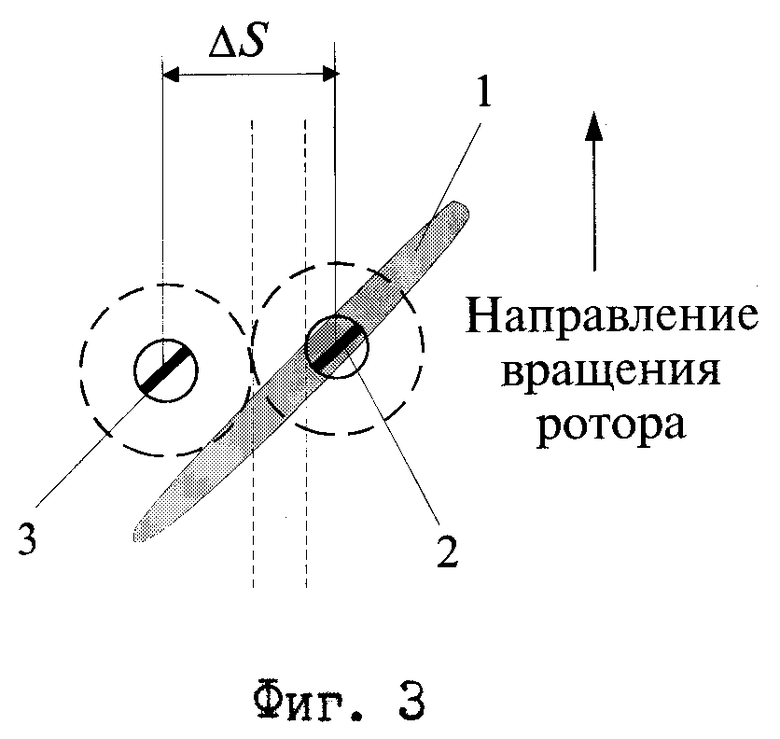
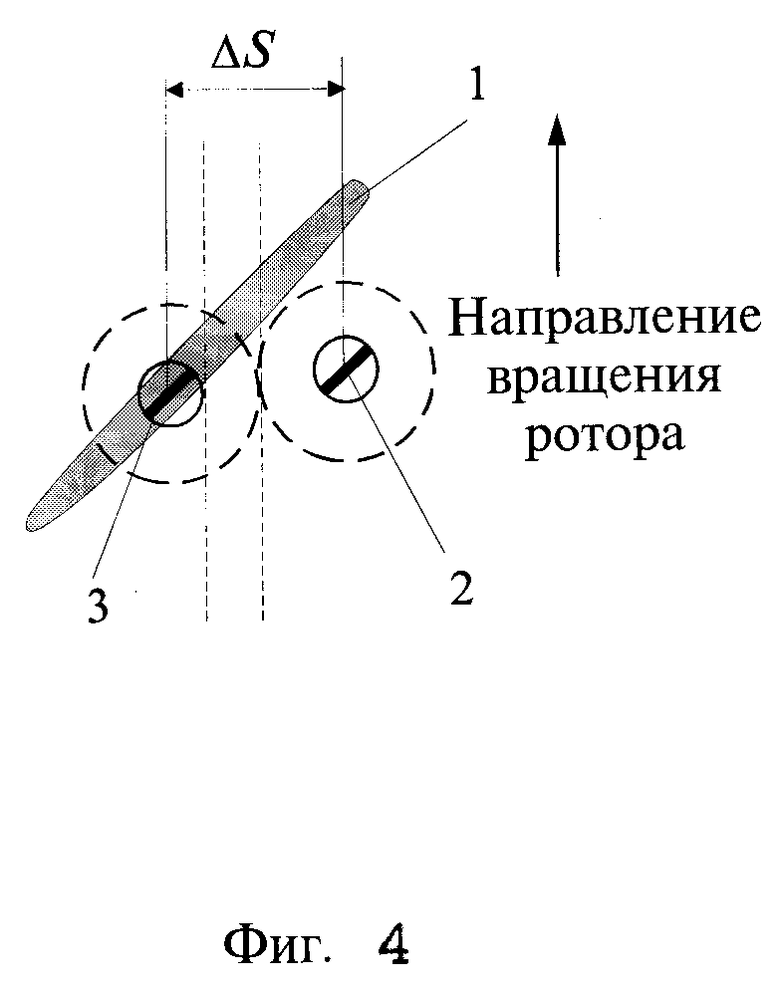
На фиг. 2-4 представлена схема, поясняющая сущность способа измерения параметров движения лопаток ротора турбомашины:
фиг.2 - для случая, когда нет смещения лопаток ротора турбомашины;
фиг.3 - лопатки ротора турбомашины смещены вправо;
фиг.4 - лопатки ротора турбомашины смещены влево.
На фиг.2-4 показаны лопатка 1 и преобразователи 2, 3. Опрос преобразователей производится при фиксированном угловом положении лопатки. При отсутствии осевого смещения (фиг.2) чувствительность преобразователей 2, 3 будет одинаковой, при осевом смещении лопатки 1 вправо (фиг.3) чувствительность преобразователя 2 увеличивается, а чувствительность преобразователя 3 уменьшается. Аналогично, при осевом смещении лопатки 1 влево (фиг.4) возрастает чувствительность преобразователя 3, а чувствительность преобразователя 2 уменьшается.
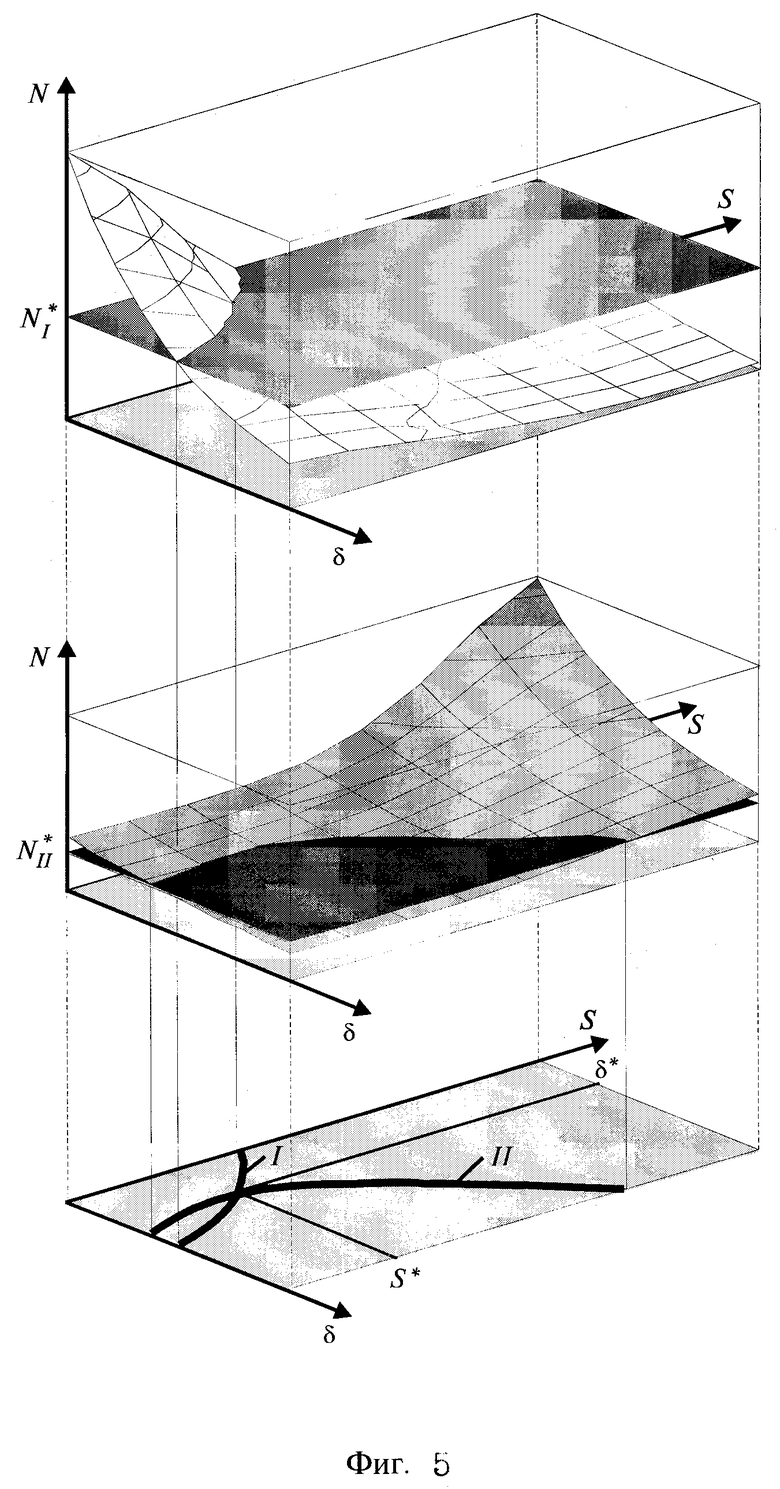
На фиг.5 представлены диаграммы, поясняющие алгоритм определения радиального зазора и осевого смещения.
Измерение радиальных зазоров между статором и торцами лопаток колеса ротора и осевых смещений лопаток предлагаемым способом производится следующим образом. По временному интервалу между двумя соседними синхроимпульсами (импульсами датчика синхронизации) определяют величину периода Tоб вращения ротора турбомашины. Определяют интервалы времени до появления первой лопатки под обоими преобразователями:
tн2= tн1+tϕ,
где tн1, tн2 - временной интервал от появления синхроимпульса до момента появления первой лопатки под первым и вторым преобразователем соответственно;
Tоб - период вращения ротора турбомашины;
αн - угол между первым преобразователем и серединой ближайшей лопатки в момент выдачи синхроимпульса; время, затраченное на прохождение лопатки от первого преобразователя до второго (ϕ - угол смещения между преобразователями).
время, затраченное на прохождение лопатки от первого преобразователя до второго (ϕ - угол смещения между преобразователями).
Отсчитывают полученные интервалы времени от момента появления очередного синхроимпульса и производят опрос преобразователей группами импульсов, число которых выбирается из условия допустимой неравномерности огибающей выходного сигнала преобразователей.
Затем отсчитывают интервал до следующей лопатки
tл = Tоб/Nл,
где Nл - число лопаток на колесе ротора,
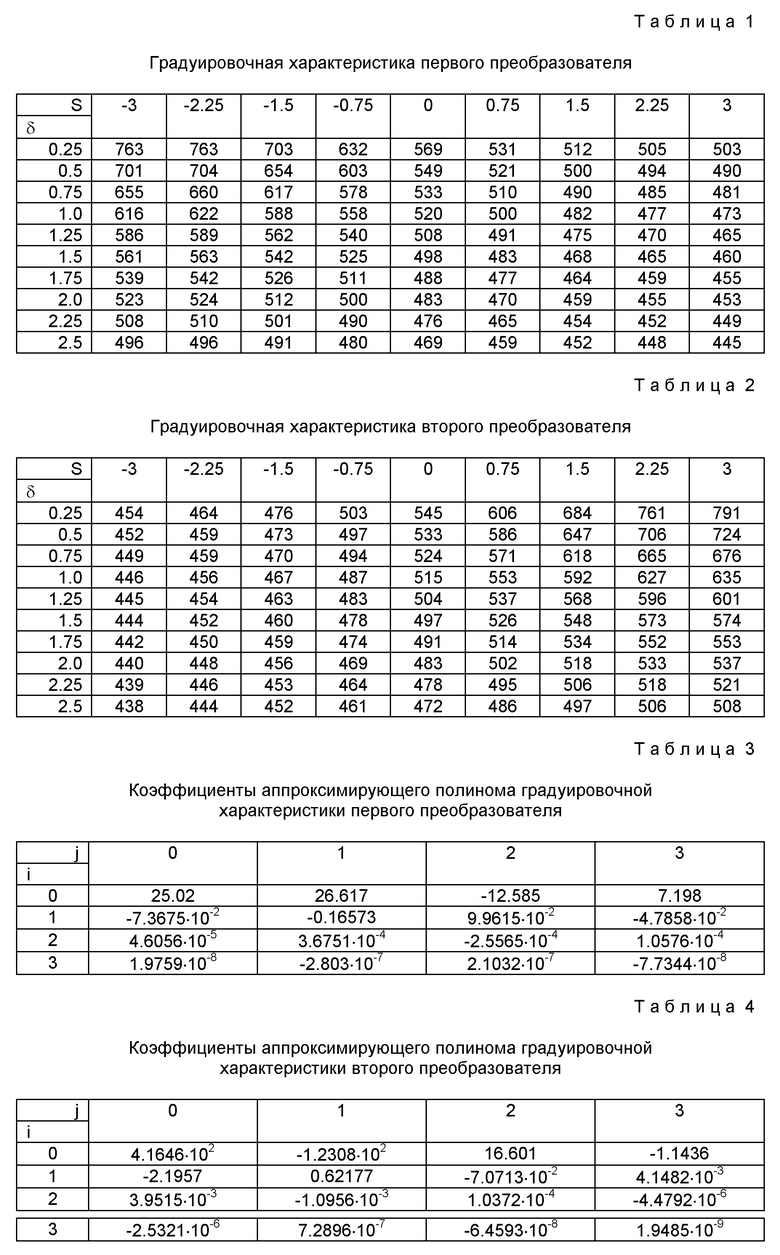
и повторяют вышеописанные действия до тех пор, пока не будут опрошены все лопатки. По завершению опроса для каждой лопатки производят определение кодов NI и NII, соответствующих максимумам огибающих выходных сигналов преобразователей, и по их значениям определяют радиальный зазор δ и осевое смещение S путем решения системы из двух уравнений, полученных на основе градуировочных характеристик преобразователей:
Градуировочная характеристика каждого преобразователя представляет собой собранные в таблицы значения цифровых кодов, соответствующих максимумам огибающих выходных сигналов преобразователя, как функции радиального зазора при фиксированных значениях осевого смещения. Графически такая характеристика может быть интерпретирована в виде поверхности (фиг.5), координаты которой по вертикали характеризуют цифровой код, а в прямоугольных координатах - радиальный зазор и осевое смещение.
На фиг.5 NI * и NII * - горизонтальные плоскости, отличающиеся вертикальными координатами, соответствующие максимумам огибающих выходного сигнала первого и второго преобразователей. Пересечение плоскости NI * с поверхностью, соответствующей градуировочной характеристике для первого преобразователя, происходит в пространстве по кривой, проекции I которой на прямоугольную плоскость ЗАЗОР-СМЕЩЕНИЕ соответствует множество значений радиальных зазоров и осевых смещений. Аналогично, пересечением плоскости NII * с поверхностью, соответствующей градуировочной характеристике для второго преобразователя, является другая кривая в пространстве, проекции II которой на плоскость ЗАЗОР-СМЕЩЕНИЕ также соответствует множество значений радиальных зазоров и осевых смещений.
Определить единственную пару значений радиального зазора ((δ*) *) и осевого смещения (S*) для фиксированных кодов NI * и NII * можно путем поиска точки пересечения проекций указанных кривых. Для этого можно использовать, например, метод Ньютона [Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся ВТУЗОВ, М.- "Наука", 1986, с.497].
В качестве примера конкретной реализации способа рассмотрим измерение вихретоковыми преобразователями с чувствительными элементами в виде отрезка проводника [Патент 1394912 СССР, МКИ G 01 N 27/90. Высокотемпературный вихретоковый преобразователь /Скобелев О. П. , Секисов Ю.Н., Хритин А.А.] зазора δмежду торцами лопаток 1, 2 колеса ротора 8 и статором 6 турбомашины и осевого смещения лопаток S (фиг.1). Преобразователи 4, 5 располагают на статоре 6 вдоль оси турбомашины со смещением Δ S = 6 мм, при этом второй преобразователь сдвинут по образующей статора относительно первого на угол ϕ = 0.5o.
После подачи команды, инициирующей процесс измерения, на первом обороте определяется период вращения poтopa турбомашины. В течение последующих двух оборотов производится расчет интервала времени от появления синхроимпульса до момента появления первой лопатки под первым преобразователем и интервала времени до следующей лопатки.
Далее производится формирование последовательности групп импульсов питания первого вихретокового преобразователя. В каждой группе формируем по 3 импульса исходя из условия допустимой неравномерности огибающей выходного сигнала преобразователя. В ответ на каждый импульс питания вихретоковый преобразователь возбуждает электромагнитное поле, взаимодействующее с лопаткой в зоне чувствительности. В результате индуктивность преобразователя изменяется в зависимости от осевого смещения лопатки в зоне чувствительности и от зазора между торцами лопаток и статором турбомашины. Выходной параметр вихретокового преобразователя преобразуется в электрический сигнал и код, пропорциональный зазору между датчиком и лопаткой.
Аналогично производится опрос второго преобразователя.
После опроса преобразователей путем аппроксимаций отсчетов в каждой группе определяют коды, соответствующие максимумам огибающих выходных сигналов преобразователей. В рассматриваемом примере для первой лопатки NI * = 588 и NII * = 467.
Градуировочные характеристики для преобразователей, полученные экспериментальным путем, представлены в табл.1 и табл.2.
В результате аппроксимации градуировочных характеристик преобразователей полиномом третьей степени система уравнений (1) примет вид
где α
В результате решения системы уравнений (2) методом Ньютона получим искомые значения радиального зазора и осевого смещения, равные
δ = 1 мм, S = -1.5 мм.
Таким образом, по сравнению с прототипом предлагаемый способ дает более точную информацию о радиальном зазоре между статором и торцами лопаток ротора путем учета дополнительного влияющего фактора-осевого смещения, а также позволяет определить само осевое смещение лопаток ротора турбомашины, что повышает информативность и точность измерений параметров движения лопаток ротора турбомашины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОПАСТЕЙ ВИНТОВЕНТИЛЯТОРА | 1996 |
|
RU2146038C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБИНЫ | 2010 |
|
RU2457432C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2258902C2 |
| СПОСОБ ОБНАРУЖЕНИЯ КРУТИЛЬНЫХ И ИЗГИБНЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ОСЕВОГО КОМПРЕССОРА ПРИ ИССЛЕДОВАНИЯХ СРЫВНЫХ ЯВЛЕНИЙ | 2006 |
|
RU2320957C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2008 |
|
RU2390723C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СИЛЫ ТЯГИ ВИНТА ЗАКАПОТИРОВАННОЙ ВИНТОВЕНТИЛЯТОРНОЙ СИЛОВОЙ УСТАНОВКИ | 2007 |
|
RU2351905C1 |
| СПОСОБ УСКОРЕННОГО ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2010 |
|
RU2454626C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2009 |
|
RU2431114C2 |
Изобретение может быть использовано для бесконтактного автоматического контроля параметров движения лопаток ротора турбомашины в процессе испытаний и эксплуатации. На статоре турбомашины устанавливают два вихретоковых преобразователя. Расстояние между преобразователями вдоль оси турбомашины выбирают таким, чтобы торец лопатки не выходил из зоны чувствительности преобразователей. Преобразователи смещают относительно друг друга в плоскости вращения ротора турбомашины на некоторый угол. Преобразователи возбуждаются последовательностями групп импульсов. Число групп импульсов равно числу лопаток турбомашины. Временное смещение последовательностей, возбуждающих первый и второй преобразователи друг относительно друга соответствует угловому смещению преобразователей. По сигналам преобразователей определяют радиальные зазоры между лопатками и преобразователями. Способ позволяет также определять осевое смещение ротора турбомашины. 5 ил., 4 табл.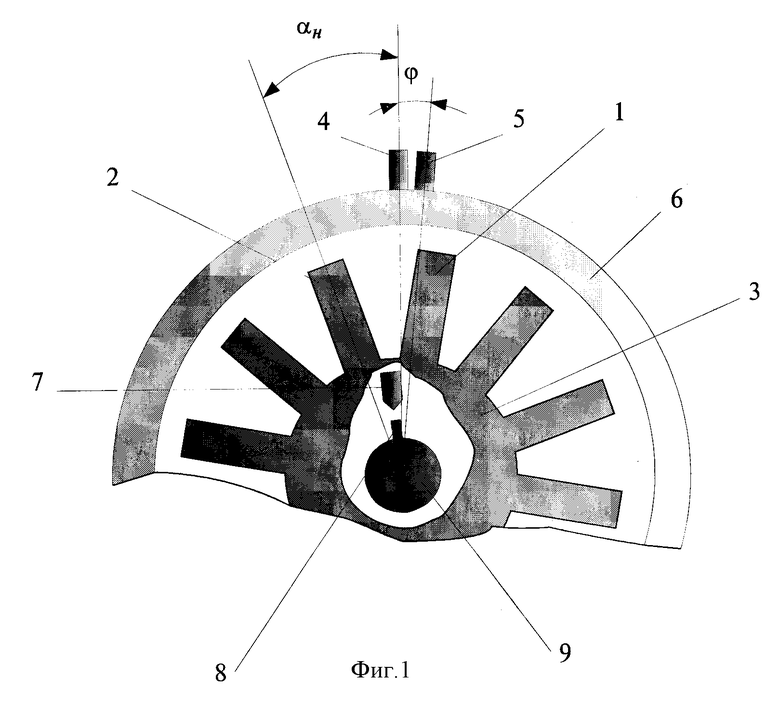
Способ измерения параметров движения лопаток ротора турбомашины, заключающийся в том, что с торцами лопаток работающей турбомашины вводят во взаимодействие синхронизированный с ее вращением вихретоковый преобразователь, возбуждаемый последовательностями из группы импульсов, выбираемых по числу лопаток в колесе турбомашины, а число импульсов в каждой группе выбирают из условия допустимой неравномерности огибающей выходного сигнала вихретокового преобразователя и по его сигналам оценивают радиальные зазоры между лопатками и указанными преобразователями, отличающийся тем, что для решения задачи повышения точности и информативности измерения используют два преобразователя, которые размещают на таком расстоянии вдоль оси турбомашины, когда при всех возможных осевых смещениях контролируемый торец лопатки не выходит из зоны чувствительности каждого преобразователя, возбуждают первый и второй преобразователи последовательностями импульсов, причем последовательность импульсов для второго преобразователя смещают на время, определяемое оборотами ротора турбомашины и углом смещения между преобразователями, по найденным значениям выходных сигналов обоих преобразователей путем решения системы двух уравнений, полученных на основе семейств градуировочных характеристик преобразователей определяют значения радиального зазора и осевого смещения.
| Способ измерения радиальных зазоров в турбомашинах | 1990 |
|
SU1779908A1 |
| US 4934192 A, 19.06.90 | |||
| US 4518917 A, 21.05.85. | |||
