Изобретение относится к области измерительной техники и может быть использовано для измерения координатных составляющих смещений торцов лопаток ротора относительно статора турбомашины.
Известен способ измерения радиальных смещений торцов лопаток ротора при одновременном измерении осевых смещений ротора турбомашины, при котором на статоре турбомашины устанавливают кластер из двух высокотемпературных вихретоковых преобразователей, смещенных друг относительно друга и возбуждаемых импульсами, синхронизируемыми с ее вращением, и по их сигналам оценивают координатные составляющие смещения торцов лопаток относительно указанных преобразователей в течение нескольких периодов вращения ротора турбомашины [патент РФ №2138012 «Способ измерения параметров движения лопаток ротора турбомашины», кл. G01B 7/14, 1999].
Недостатком этого способа является низкая информативность измерения из-за невозможности определения смещения торцов лопаток в направлении вращения ротора турбомашины, обусловленных изгибом пера лопатки.
Наиболее близким по технической сущности к предлагаемому изобретению является способ измерения, при котором на статоре турбомашины устанавливают кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, смещенных друг относительно друга и возбуждаемых последовательностями импульсов, синхронизируемых с ее вращением, и по значениям выходных сигналов всех преобразователей путем решения системы из трех уравнений, полученных на основе семейств градуировочных характеристик преобразователей, в течение нескольких периодов вращения ротора турбомашины определяют координатные составляющие смещения торцов лопаток [патент РФ №2272990 «Способ измерения многомерных перемещений и обнаружения колебаний торцов лопаток ротора турбомашины», кл. G01B 7/14, 2002]. В то же время в известных высокотемпературных одновитковых вихретоковых преобразователях (Райков Б.К, Секисов Ю.Н., Скобелев О.П., Хритин А.А. Вихретоковые датчики зазоров с чувствительными элементами в виде отрезка проводника // Приборы и системы управления, 1996, №8, с.27 и патент РФ №2150676) не предусмотрены конструктивные меры снижения влияния больших изменений температур в компрессорах и турбинах, что вызывает необходимость использования дифференциальных измерительных цепей и дополнительных идентичных преобразователей, компенсирующих температурные воздействия на рабочие преобразователи. Компенсационные преобразователи устанавливаются на статоре таким образом, чтобы торцы лопаток в момент измерения находились в наибольшем отдалении от чувствительных элементов вне зоны чувствительности к смещениям торцов лопаток, но в температурных условиях, аналогичных температурным условиям чувствительных элементов рабочих преобразователей. Компенсационные преобразователи требуют трех дополнительных отверстий, число которых в конечном итоге возрастает вдвое (Методы и средства измерения многомерных перемещений элементов конструкций силовых установок. Под ред. Секисова Ю.Н., Скобелева О.П. - Самара: Самарский научный центр РАН, 2001, 188 с.).
Таким образом, недостатком способа является аппаратная избыточность, связанная со значительным числом преобразователей, и, как следствие, ведущая к необходимости соответствующего числа установочных отверстий, т.е. к снижению прочности статора.
Следует также отметить, что сосредоточение преобразователей на ограниченной площади поверхности статора сужает возможности размещения чувствительных элементов с требуемой топологией. Это ограничение также является недостатком известного способа, причем этот недостаток является общим для всех возможных вариантов топологии размещения чувствительных элементов в сосредоточенных кластерах (Методы и средства измерения многомерных перемещений элементов конструкций силовых установок. Под ред. Секисова Ю.Н., Скобелева О.П. - Самара: Самарский научный центр РАН, 2001, 188 с., (с.29-31), С.Ю.Боровик, Б.К.Райков, Ю.Н.Секисов, О.П.Скобелев, В.В.Тулупова. Метод измерения радиальных смещений лопастей винтовентилятора с использованием каналов физической и виртуальной коррекции // Проблемы управления и моделирования в сложных системах: Труды V международной конференции (Самара, 17-21 июня 2003 г). - Самара: Самарский НЦ РАН, 2003. - с.512-520).
Цель изобретения - снижение аппаратных затрат при сохранении информативности измерения.
В предположении медленных (квазистатических) изменений искомых координат смещений торцов лопаток в течение несколько оборотов ротора, которыми можно пренебречь ввиду их малости, указанная цель достигается тем, что в известном способе, при котором во взаимодействие с торцами контролируемых лопаток вводят кластер из высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, включенных в дифференциальные измерительные цепи, которые возбуждают последовательностями импульсов, синхронизируемыми с ее вращением, преобразуют индуктивности всех чувствительных элементов в напряжения и фиксируют соответствующие цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей, отличающемся тем, что с целью снижения аппаратных затрат при сохранении информативности измерения три высокотемпературных одновитковых вихретоковых преобразователя размещают распределенно на статорной оболочке в пределах трех участков ее поверхности, в каждом из которых выбирают по одной точке, находящейся в зоне чувствительности соответствующего преобразователя, причем первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток контролируемого колеса ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора; преобразование индуктивностей чувствительных элементов в напряжения и фиксацию соответствующих кодов проводят в три этапа: на первом - результаты преобразований фиксируют в моменты прохождения замками всех лопаток колеса первой точки, на втором - второй и на третьем - третьей точки; при этом на первом этапе функции рабочего и компенсационного выполняют первый и второй чувствительные элементы соответственно, на втором -второй и первый, а на третьем - третий и первый чувствительные элементы соответственно.
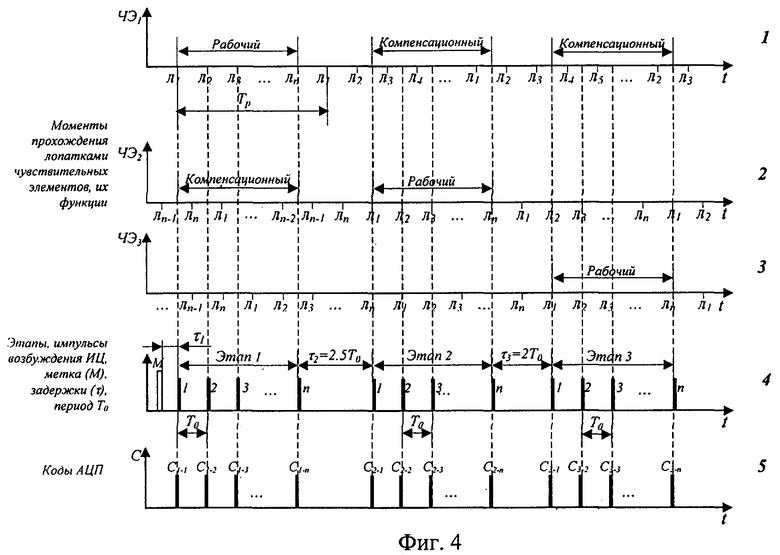
На фиг.1 представлены схематическое изображение ступени турбомашины 1, взаимное расположение точек преобразования индуктивностей чувствительных элементов в напряжение и фиксации результирующих кодов 01, 02 и 03 и систем отсчета (показаны оси координат Y и Z, оси Х направлены перпендикулярно плоскости чертежа) с началами отсчета, совпадающими с точками 01, 02 и 03. Угловые расстояния между точками 01 и 02 составляют полтора угловых шага (Δψ) установки лопаток на колесе ротора 2, а между точками 02 и 03 - один шаг, что с учетом реальных размеров преобразователей позволяет не слишком увеличивая по сравнению с прототипом размеры зоны установки преобразователей, избежать их взаимное электромагнитное влияние, сохранить им одинаковые температурные условия и иметь в качестве компенсационного преобразователь, максимально удаленный от смежных лопаток на момент поступления возбуждающего импульса и результирующего отсчета. Здесь же представлены статор 3, датчик синхронизации 4 и метка 5 на валу ротора 6.
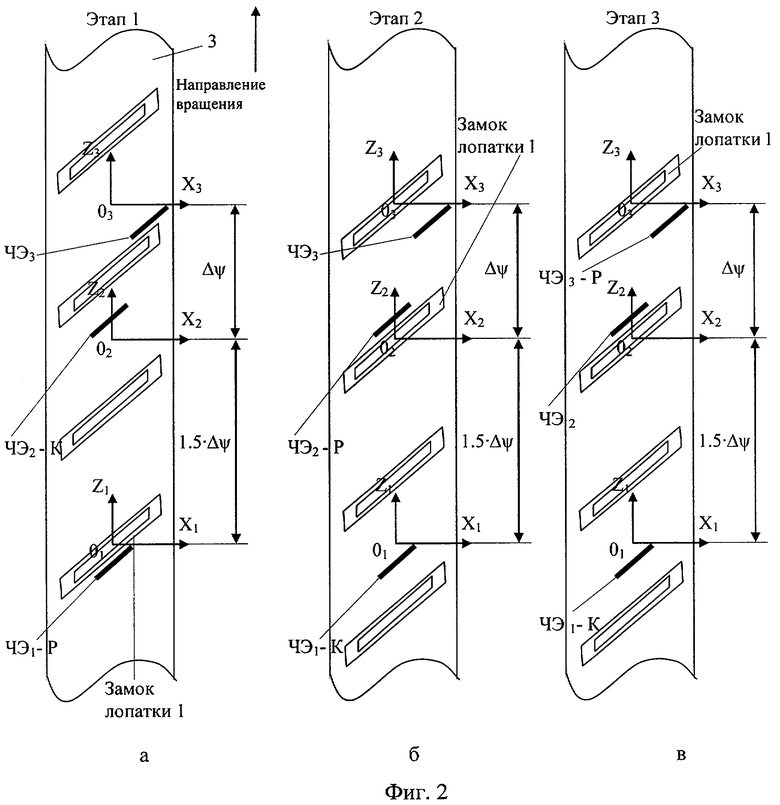
На фиг.2 представлена схема, поясняющая расположение чувствительных элементов (ЧЭ) распределенного кластера, сформированные пары рабочих (Р) и компенсационных (К) ЧЭ: на этапе 1 - пара ЧЭ1-Р и ЧЭ2-К (фиг.2а), на этапе 2 - пара ЧЭ2-Р-ЧЭ1-К (фиг.2б), на этапе 3 - пара ЧЭ3-Р-ЧЭ1-К (фиг.2в), а также точки 01, 02 и 03 и системы отсчета на различных этапах преобразования (показаны оси X, Z, оси У направлены перпендикулярно плоскости чертежа).
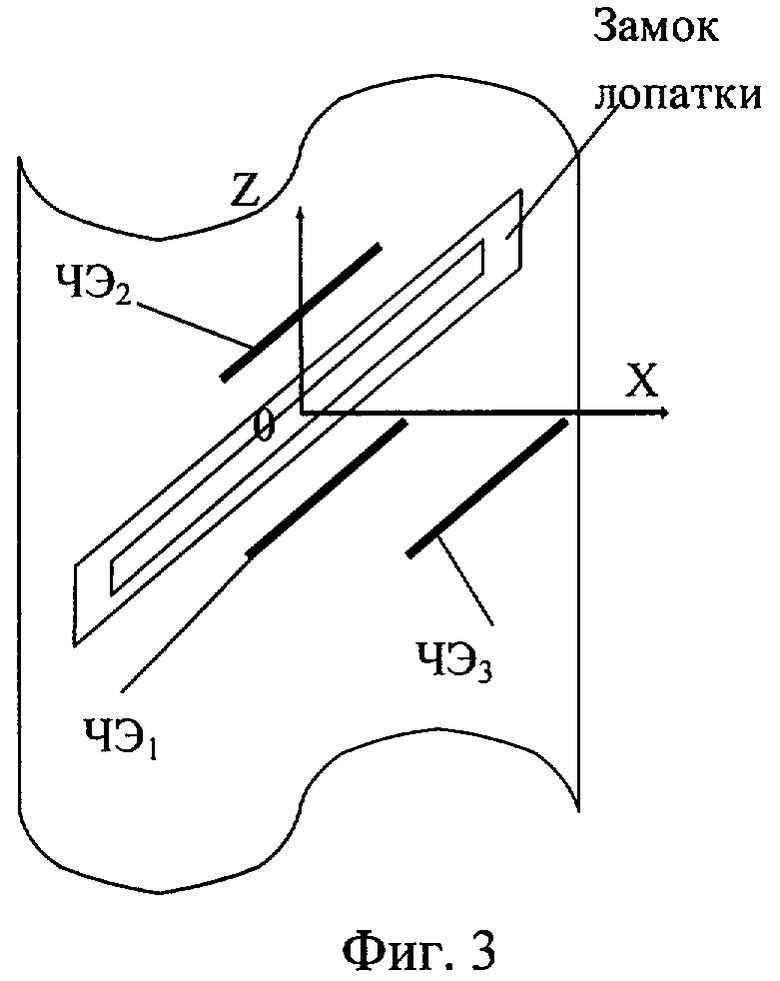
На фиг.3 представлены виртуальная совмещенная система отсчета (0XYZ), к которой приводятся искомые координатные составляющие, и виртуальный сосредоточенный кластер, что оказывается возможным благодаря квазистатическому характеру изменения смещений торцов лопаток во времени (это имеет место в реально существующих турбомашинах).
На фиг.4 представлены временные диаграммы, на которых показаны моменты прохождения замками лопаток первого, второго и третьего чувствительных элементов распределенного кластера и их функции в дифференциальной измерительной цепи (ИЦ) - рабочего и компенсационного (эпюры 1, 2 и 3), этапы преобразования (эпюра 4) и импульсы возбуждения измерительной цепи с периодом  , где Tp - период вращения ротора, а n - число лопаток ступени (эпюры 1, 2, 3), τ1, τ2, τ3 - задержки последовательностей импульсов возбуждения измерительной цепи на этапах 1, 2, 3, М - импульс синхронизации от стандартного датчика частоты вращения, Cj-i - коды, полученные в результате преобразования естественных выходных сигналов (индуктивностей) вихретоковых преобразователей и используемые для вычисления координат смещения i-й лопатки после того, как с ней взаимодействовали в качестве рабочего каждый из трех (j=1, 2, 3) одновитковых вихретоковых преобразователей.
, где Tp - период вращения ротора, а n - число лопаток ступени (эпюры 1, 2, 3), τ1, τ2, τ3 - задержки последовательностей импульсов возбуждения измерительной цепи на этапах 1, 2, 3, М - импульс синхронизации от стандартного датчика частоты вращения, Cj-i - коды, полученные в результате преобразования естественных выходных сигналов (индуктивностей) вихретоковых преобразователей и используемые для вычисления координат смещения i-й лопатки после того, как с ней взаимодействовали в качестве рабочего каждый из трех (j=1, 2, 3) одновитковых вихретоковых преобразователей.
Измерение искомых координат смещения торцов лопаток ротора турбомашины предлагаемым способом осуществляется следующим образом. Получению информации с распределенного кластера одновитковых вихретоковых преобразователей предшествует измерение периода вращения ротора турбомашины (Tp). С этой целью используют датчик частоты вращения промышленного изготовления и метка на валу ротора.
Найденные значения периода вращения Tp используют для вычисления моментов прохождения замками лопаток точек 01, 02 и 03 в зонах действия электромагнитных полей рабочих чувствительных элементов распределенного кластера (фиг.4, эпюры 1-3), а также для определения периода тактовых импульсов Т0, временных задержек τ1, τ2 τ3 и этапов функционирования измерительной цепи в соответствии с предлагаемым способом (фиг.4, эпюра 4). При этом каждый из трех этапов завершается после получения информации о координатах смещений торца последней лопатки (номер n) а длительность каждого этапа соответствует периоду вращения ротора.
Согласно предлагаемому способу на этапе 1 функционирует пара ЧЭ1-Р и ЧЭ2-К (фиг.2а). Благодаря задержке τ1 импульсы управления с периодом Т0 появляются в момент прохождения замка лопатки 1 ЧЭ1 (в этот момент ЧЭ2 удален от смежных лопаток, которые находятся вне зоны его чувствительности, и ЧЭ2 функционирует в качестве компенсационного, фиг.4). Эти импульсы возбуждают ИЦ и запускают процесс преобразования индуктивностей преобразователей в напряжение и далее в цифровые коды C1-1, C1-2, …, С1-n.
На этапе 2 используют ту же пару ЧЭ, но их функции меняются (фиг.2б). Благодаря задержке τ2 импульсы управления появляются в момент прохождения замка лопатки 1 ЧЭ2 (в этот момент ЧЭ1 удален от смежных лопаток, которые находятся вне зоны его чувствительности, и ЧЭ1 функционирует в качестве компенсационного, фиг.4). Преобразования завершают формированием кодов C2-1, C2-2, …, C2-n.
На этапе 3 функционирует другая пара ЧЭ (фиг.2в), причем компенсационные функции в этой паре по-прежнему выполняет ЧЭ1 (ЧЭ1-К), а рабочим становится ЧЭ3 (ЧЭ3-Р). С задержкой τ3 появляются импульсы возбуждения и соответствующие коды C3-1, C3-2…C3-n. Таким образом, длительность получения информации о координатах смещения составляет около трех периодов вращения ротора (≈3Tp).
По завершении формирования триады кодов по каждой лопатке осуществляется вычисление координатных составляющих.
Значения координат смещений в радиальном (Y), осевом (X) направлениях и в направлении вращения (Z) для i-й лопатки находятся путем решения системы из трех уравнений, полученных на основе снятых экспериментально семейств градуировочных характеристик измерительных каналов, связывающих коды аналого-цифрового преобразования и координаты смещений. При подстановке конкретных значений кодов, полученных в моменты прохождения замком i-й лопатки точек преобразования индуктивностей ЧЭ и фиксации кодов 01, 02 и 03 (C1-i, C2-i, C3-i) и благодаря квазистатическому характеру изменения смещений торцов лопаток во времени система уравнений для i-й лопатки принимает вид
и решается относительно координат ее смещения X, Y, Z.
Таким образом, по сравнению с прототипом предлагаемый способ позволяет получить информацию о координатах смещений торцов лопаток, уменьшив вдвое общее число используемых преобразователей и соответственно число установочных отверстий, что в сочетании с их распределенностью по статорной оболочке обеспечивает меньшую потерю прочности. Кроме того, распределенность преобразователей по статорной оболочке облегчает ориентацию чувствительных элементов для получения требуемой топологии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2009 |
|
RU2431114C2 |
| СПОСОБ УСКОРЕННОГО ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2010 |
|
RU2454626C2 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ РАБОЧИХ ЛОПАТОК ТУРБИНЫ | 2013 |
|
RU2556297C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБИНЫ | 2010 |
|
RU2457432C1 |
| СПОСОБ ОБНАРУЖЕНИЯ КРУТИЛЬНЫХ И ИЗГИБНЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ОСЕВОГО КОМПРЕССОРА ПРИ ИССЛЕДОВАНИЯХ СРЫВНЫХ ЯВЛЕНИЙ | 2006 |
|
RU2320957C1 |
| СПОСОБ ИЗМЕРЕНИЯ С ЗАДАННОЙ ТОЧНОСТЬЮ РАДИАЛЬНЫХ ЗАЗОРОВ МЕЖДУ ТОРЦАМИ ЛОПАТОК РАБОЧЕГО КОЛЕСА И СТАТОРНОЙ ОБОЛОЧКОЙ ТУРБОМАШИНЫ ПРИ ДИСКРЕТНОМ ПОСТУПЛЕНИИ ИНФОРМАЦИИ С ДАТЧИКА | 2016 |
|
RU2651628C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СИЛЫ ТЯГИ ВИНТА ЗАКАПОТИРОВАННОЙ ВИНТОВЕНТИЛЯТОРНОЙ СИЛОВОЙ УСТАНОВКИ | 2007 |
|
RU2351905C1 |
| ВИХРЕТОКОВЫЙ ДАТЧИК СО СМЕЩЕННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2021 |
|
RU2778031C1 |
| СПОСОБ ОЦЕНКИ ДЕФОРМАЦИИ СТАТОРА И ПАРАМЕТРОВ БИЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2379626C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения координатных составляющих смещений торцов лопаток колеса ротора относительно статора турбомашины. Сущность: проводят раздельное определение смещений торцов лопаток в радиальном, осевом направлениях и направлении вращения ротора с помощью трех высокотемпературных одновитковых вихретоковых преобразователей. Преобразователи размещают распределенно на статорной оболочке в пределах трех участков ее поверхности. На каждом участке выбирают по одной точке, находящейся в зоне чувствительности соответствующего преобразователя. Первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток на колесе ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора. Преобразование индуктивностей чувствительных элементов в напряжения и фиксацию соответствующих кодов проводят в три этапа: на первом результаты преобразований фиксируют в моменты прохождения замками всех лопаток колеса первой точки, на втором - второй и на третьем - третьей точки. При этом на первом этапе функции рабочего и компенсационного выполняют первый и второй чувствительные элементы соответственно, на втором - второй и первый, а на третьем - третий и первый чувствительные элементы соответственно. Технический результат: снижение аппаратных затрат при сохранении информативности измерения. 4 ил.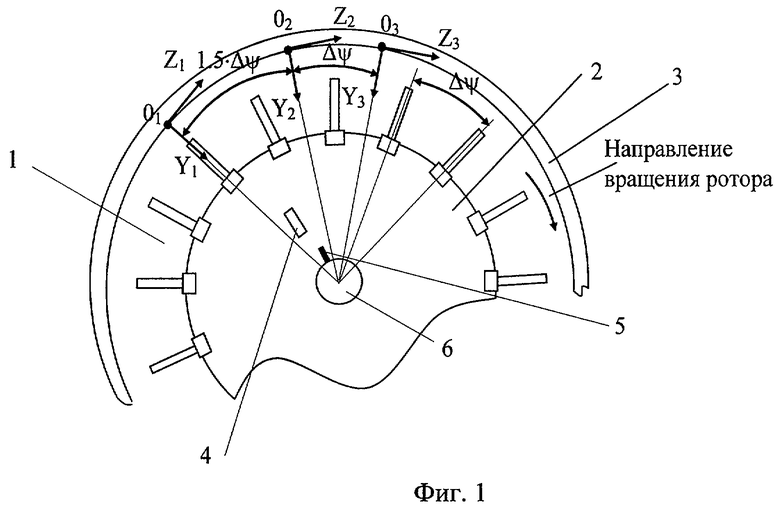
Способ измерения координатных составляющих смещений торцов лопаток ротора работающей турбомашины, при котором во взаимодействие с торцами контролируемых лопаток вводят кластер из высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, включенных в дифференциальные измерительные цепи, которые возбуждают последовательностями импульсов, синхронизируемыми с ее вращением, преобразуют индуктивности всех чувствительных элементов в напряжения и фиксируют соответствующие цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей, отличающийся тем, что, с целью снижения аппаратных затрат при сохранении информативности измерения, три высокотемпературных одновитковых вихретоковых преобразователя размещают распределение на статорной оболочке в пределах трех участков ее поверхности, в каждом из которых выбирают по одной точке, находящейся в зоне чувствительности соответствующего преобразователя, причем первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток контролируемого колеса ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора; преобразование индуктивностей чувствительных элементов в напряжения и фиксацию соответствующих кодов проводят в три этапа: на первом - результаты преобразований фиксируют в моменты прохождения замками всех лопаток колеса первой точки, на втором - второй и на третьем - третьей точки; при этом на первом этапе функции рабочего и компенсационного выполняют первый и второй чувствительные элементы соответственно, на втором - второй и первый, а на третьем - третий и первый чувствительные элементы соответственно.
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 1996 |
|
RU2138012C1 |
| US 4970670 A, 13.11.1990 | |||
| US 5365663 A, 22.11.1994 | |||
| US 7424823 B2, 16.09.2008. | |||

