Изобретение относится к области измерительной техники и может быть использовано для измерения координатных составляющих смещений торцов лопаток ротора относительно статора турбомашины.
Известен способ измерения радиальных смещений торцов лопаток ротора при одновременном измерении осевых смещений ротора турбомашины, при котором на статоре турбомашины устанавливают два вихретоковых преобразователя, смещенных друг относительно друга и возбуждаемых импульсами, синхронизируемыми с ее вращением, и по их сигналам оценивают координатные составляющие смещения торцов лопаток относительно указанных преобразователей в течение нескольких периодов вращения ротора турбомашины (патент РФ №2138012 «Способ измерения параметров движения лопаток ротора турбомашины», кл. G01B 7/14, 1999).
Недостатком этого способа является низкая информативность измерения из-за невозможности определения смещения торцов лопаток в направлении вращения ротора турбомашины, обусловленных изгибом пера лопатки.
Наиболее близким по технической сущности к предлагаемому изобретению является способ измерения, при котором на статоре турбомашины устанавливают кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, распределенными по статорной оболочке и расположенными на трех участках ее поверхности, на каждом из которых выбирают по одной точке, названной «виртуальным» геометрическим центром, причем точки смещены друг относительно друга в направлении вращения ротора, два из трех преобразователей включают в дифференциальную измерительную цепь с меняющимся от оборота к обороту ротора составом преобразователей или их функциями в измерительной цепи, возбуждаемой в моменты прохождения замками лопаток выбранных точек последовательностью импульсов, синхронизируемой с вращением турбомашины, преобразуют индуктивность чувствительных элементов в напряжение и фиксируют соответствующие выходному напряжению измерительной цепи цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей (Беленький Л.Б., Боровик С.Ю., Логвинов А.В., Райков Б.К., Скобелев О.П., Секисов Ю.Н., Тулупова В.В. Методы измерения смещений торцов лопаток в компрессорах и турбинах на основе распределенных кластеров датчиков. Часть 1. Обоснование предлагаемых методов и их описание. // Мехатроника, автоматизация, управление. 2009, №4, с.16-19; Беленький Л.Б., Боровик С.Ю., Райков Б.К., Скобелев О.П., Секисов Ю.Н., Тулупова В.В. Методы измерения смещений торцов лопаток в компрессорах и турбинах на основе распределенных кластеров датчиков. Часть 2. Реализуемость методов. // Мехатроника, автоматизация, управление. 2009, №5, с.21-30).
Недостатком способа является низкое быстродействие, связанное с тем, что сбор данных, необходимых для определения смещений торцов лопаток ротора, происходит в три этапа, каждый из которых занимает один оборот ротора. Кроме того, возможная в продолжении трех оборотов ротора нестабильность ранее найденного периода его вращения, которым определяется периодичность и моменты возбуждения измерительной цепи, приводит к дополнительной динамической погрешности измерения смещений торцов лопаток ротора.
Цель изобретения - повышение быстродействия и точности.
Указанная цель достигается тем, что в известном способе, при котором во взаимодействие с торцами лопаток работающей турбомашины вводят кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, распределенными по статорной оболочке и расположенными на трех участках ее поверхности, на каждом из которых выбирают по одной точке, причем точки смещены друг относительно друга в направлении вращения ротора, два из трех преобразователей включают в дифференциальную измерительную цепь с меняющимся составом преобразователей или их функциями в измерительной цепи, возбуждаемой в моменты прохождения замками лопаток выбранных точек последовательностью импульсов, синхронизируемой с вращением турбомашины, преобразуют индуктивность чувствительных элементов в напряжение и фиксируют соответствующие выходному напряжению измерительной цепи цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей, отличающийся тем, что первая, вторая и третья точки последовательно смещены друг относительно друга на угол, составляющий четыре третьих угловых шага установки лопаток контролируемого колеса ротора, а очередной импульс синхронизируемой последовательности формируется при повороте колеса на одну треть углового шага установки лопаток, причем с приходом каждого импульса функция преобразователя в измерительной цепи меняется с рабочей на компенсационную так, что в пределах триады импульсов каждый преобразователь по одному разу выполняет функции рабочего и компенсационного.
На фиг.1 представлены схематическое изображение рабочего колеса турбомашины 1, взаимное расположение точек 01, 02 и 03, при прохождении которых замками лопаток производят преобразования индуктивностей чувствительных элементов в напряжение и фиксацию результирующих кодов, и систем отсчета (показаны оси координат Y и Z, оси Х направлены перпендикулярно плоскости чертежа) с началами отсчета, совпадающими с точками 01, 02 и 03. Угловые расстояния между точками 01 и 02 и 02 и 03 составляют 4/3·Δψл угловых шага установки лопаток (Δψл) на колесе ротора 2. Здесь же представлены статор 3, датчик синхронизации 4 и метка 5 на валу ротора 6.
На фиг.2 представлена плоская развертка фрагмента лопаточного венца, где в идеализированном виде изображены замки и торцы лопаток под номерами n-1, n, 1, 2. На том же рисунке жирными линиями показаны чувствительные элементы (ЧЭ) распределенного кластера одновитковых вихретоковых датчиков (ОВТД) (ЧЭ1, ЧЭ2, ЧЭ3), топология размещения которых и ориентация ЧЭ относительно торцов лопаток аналогичны тем, что приведены в работе (Беленький Л.Б., Боровик С.Ю., Райков Б.К., Скобелев О.П., Секисов Ю.Н., Тулупова В.В. Методы измерения смещений торцов лопаток в компрессорах и турбинах на основе распределенных кластеров датчиков. Часть 2. Реализуемость методов. // Мехатроника, автоматизация, управление. 2009, №5, с.21-30) (для большей наглядности распределенный кластер представлен в сосредоточенном виде в правой верхней части рисунка).
На фиг.3 представлены временные диаграммы, на которых показаны импульсы возбуждения измерительной цепи с периодом Т0=ТР/3·nЛ, где ТР - период вращения ротора, а nЛ - число лопаток ступени, М - импульсы синхронизации, поступающие от стандартного датчика частоты вращения (эпюра 1), моменты прохождения замками лопаток точек в зонах чувствительности первого, второго и третьего чувствительных элементов преобразователей распределенного кластера, в которых происходит преобразование их индуктивностей (эпюры 2, 3 и 4), и моменты фиксации результирующих кодов Сj-i, используемых для вычисления координатных составляющих смещения i-ой лопатки после того, как с ней взаимодействовали в качестве рабочего каждый из j=1, 2, 3 одновитковых вихретоковых преобразователей (эпюра 5), а также функции преобразователей в дифференциальной измерительной цепи при взаимодействии с лопатками - рабочего (Р) и компенсационного (К) ЧЭ.
На фиг.4 представлена Таблица 1, в которую объединены порядковые номера очередных перемещений лопаточного колеса, лопаток и чувствительных элементов датчиков.
Измерение искомых координат смещения торцов лопаток ротора турбомашины предлагаемым способом осуществляется следующим образом.
Получению информации с распределенного кластера одновитковых вихретоковых преобразователей предшествует этап измерения периода вращения ротора турбомашины (ТР). С этой целью используют датчик частоты вращения промышленного изготовления и метку на валу ротора.
Найденные значения периода вращения ТР используют для вычисления моментов прохождения замками лопаток точек O1, О2 и О3 в зонах чувствительности рабочих ЧЭ распределенного кластера, а также для определения периода тактовых импульсов Т0, причем период Т0 строго соответствует повороту колеса на угол Δψл/3.
Согласно предлагаемому способу импульсы возбуждения с периодом Т0 подаются в измерительную цепь (ИЦ) всякий раз, когда замок любой лопатки проходит мимо одного из ЧЭ.
При прохождении замка лопатки под номером 2 точки 01 ЧЭ1 в дифференциальной ИЦ выполняет рабочую функцию (ЧЭ1-P), а ЧЭ2 - компенсационную (ЧЭ2-К) (следует отметить, что для роли компенсационного возможен выбор и ЧЭ3, но его положение по отношению к ближайшей лопатке под номером n-1 менее благоприятно, чем у ЧЭ2 по отношению к лопатке под номером 11. (1 В идеале в зоне чувствительности компенсационного датчика не должны находиться торцы лопаток (или они должны находиться на максимально возможном расстоянии от ЧЭ).)
В рассматриваемом положении лопаточного колеса (фиг.2) контуры замков и торцов лопаток обведены сплошными линиями и дополнительно обозначены римскими цифрами I.
Очередные угловые перемещения лопаточного колеса на Δψл/3 вызывают соответствующие изменения положения: замков и торцов лопаток: на фиг.2 они занимают теперь вторую и третью позиции, на которых их контуры обведены линиями, выполненными в виде пунктира и квадратных точек и дополнительно обозначены римскими цифрами II и III соответственно. При этом вторая позиция характеризуется прохождением замком лопатки под номером 1 точки 02. В дифференциальной ИЦ функции рабочего выполняет ЧЭ2 (ЧЭ2-Р), а компенсационного - ЧЭ3 (ЧЭ3-К). И, наконец, третья позиция характеризуется прохождением замком лопатки под номером n точки 03. В ИЦ функции рабочего выполняет ЧЭ3 (ЧЭ3-Р), а компенсационного - ЧЭ1 (ЧЭ1-К).
В Таблицу 1 сведены результаты анализа, иллюстрированные на фиг.2 тремя позициями лопаточного колеса, а также результаты анализа для всех последующих позиций на протяжении полного периода вращения лопаточного колеса. При этом в колонке 1 даны порядковые номера очередных перемещений лопаточного колеса (на угол Δψл/3), а в колонках 2-4 порядковые номера лопаток, рабочих и компенсационных ЧЭ (соответственно).
Как следует из Таблицы 1, после девятого по счету перемещения лопаточного колеса, т.е. после его поворота на 3Δψл, для лопатки под номером 2 будет сформирована информация, достаточная для вычисления координат смещений торцов этой лопатки.
Затем аналогичная информация будет получена для лопатки под номером 1 и т.д. согласно Таблице 1. Если при этом после каждого поворота лопаточного колеса на угол 3Δψл будут вычисляться искомые координаты, то к моменту окончания периода вращения будут завершены вычисления координат для всех лопаток.
Значения координат смещений в радиальном (Y), осевом (X) направлениях и в направлении вращения (Z) для i-ой лопатки находятся путем решения системы из трех уравнений, полученных на основе снятых экспериментально семейств градуировочных характеристик измерительных каналов, связывающих коды аналого-цифрового преобразования и координаты смещений. При подстановке конкретных значений кодов, полученных в моменты прохождения замком i-ой лопатки точек преобразования индуктивностей ЧЭ и фиксации кодов 01, 02 и 03 (C1-i, С2-i, С3-i) и благодаря незначительности изменений смещений торца i-ой лопатки за время получения кодов С1-i, C2-i, C3-i система уравнений для i-ой лопатки принимает вид:
и решается относительно координат ее смещения X, Y, Z.
Очевидно, что при выбранном расстоянии (4Δψл/3) между точками, при похождении которых замками лопаток производят преобразования индуктивностей чувствительных элементов в напряжение, в процессе вращения лопаточного колеса в зоне чувствительности одного из пары ЧЭ через каждые Δψл/3 будет появляться торец лопатки, а это означает, что получение искомой информации по всем лопаткам станет возможным в течение одного периода вращения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2008 |
|
RU2390723C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2009 |
|
RU2431114C2 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ РАБОЧИХ ЛОПАТОК ТУРБИНЫ | 2013 |
|
RU2556297C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБИНЫ | 2010 |
|
RU2457432C1 |
| ВИХРЕТОКОВЫЙ ДАТЧИК СО СМЕЩЕННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2021 |
|
RU2778031C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОГО ЗАЗОРА МЕЖДУ ТОРЦАМИ РАБОЧИХ ЛОПАТОК И СТАТОРОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2016 |
|
RU2648284C2 |
| СПОСОБ ОБНАРУЖЕНИЯ КРУТИЛЬНЫХ И ИЗГИБНЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ОСЕВОГО КОМПРЕССОРА ПРИ ИССЛЕДОВАНИЯХ СРЫВНЫХ ЯВЛЕНИЙ | 2006 |
|
RU2320957C1 |
| СПОСОБ ОЦЕНКИ ДЕФОРМАЦИИ СТАТОРА И ПАРАМЕТРОВ БИЕНИЯ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2379626C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2258902C2 |
Использование: для измерения координатных составляющих смещений торцов лопаток колеса ротора относительно статора турбомашины. Сущность: производят раздельное определение смещений торцов лопаток в радиальном, осевом направлениях и в направлении вращения ротора с помощью трех высокотемпературных одновитковых вихретоковых преобразователей. Преобразователи размещают на статорной оболочке в пределах трех участков ее поверхности. На каждом участке выбирают по одной точке, находящейся в зоне чувствительности соответствующего преобразователя. Точки отстоят друг от друга на четыре третьих угловых шага установки лопаток на контролируемом колесе ротора. Преобразование индуктивностей чувствительных элементов в напряжения и фиксацию соответствующих цифровых кодов проводят за один оборот ротора. При этом функции рабочего и компенсационного преобразователи выполняют, чередуясь с приходом каждого импульса синхронизируемой последовательности, формируемого при повороте ротора на угол, равный одной трети углового шага установки лопаток. Технический результат: повышение быстродействия за счет сокращения времени сбора информации и точности за счет снижения динамической погрешности от возможной нестабильности периода вращения ротора за уменьшившееся время сбора информации. 4 ил.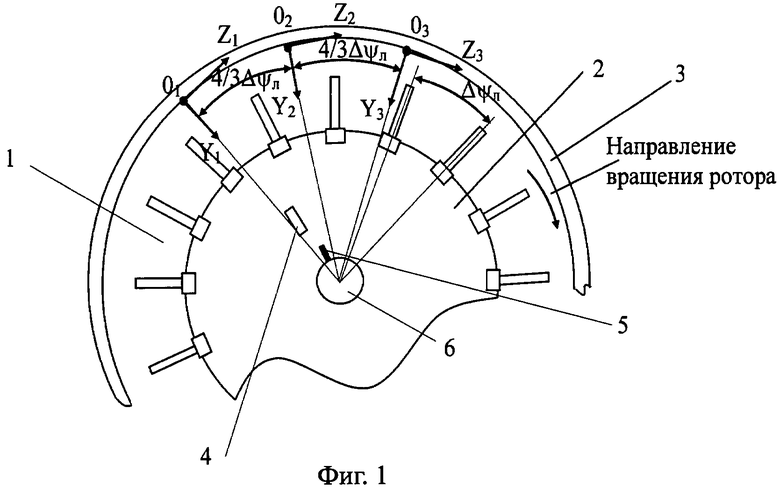
Способ измерения координатных составляющих смещений торцов лопаток ротора турбомашины, при котором во взаимодействие с торцами лопаток работающей турбомашины вводят кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, распределенными по статорной оболочке и расположенными на трех участках ее поверхности, на каждом из которых выбирают по одной точке, причем точки смещены относительно друг друга в направлении вращения ротора, два из трех преобразователей включают в дифференциальную измерительную цепь с меняющимся составом преобразователей или их функциями в измерительной цепи, возбуждаемой в моменты прохождения замками лопаток выбранных точек последовательностью импульсов, синхронизируемой с вращением турбомашины, преобразуют индуктивность чувствительных элементов в напряжение и фиксируют соответствующие выходному напряжению измерительной цепи цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей, отличающийся тем, что первая, вторая и третья точки последовательно смещены относительно друг друга на угол, составляющий четыре третьих угловых шага установки лопаток контролируемого колеса ротора, а очередной импульс синхронизируемой последовательности формируется при повороте колеса на одну треть углового шага установки лопаток, причем с приходом каждого импульса функция преобразователя в измерительной цепи меняется с рабочей на компенсационную так, что в пределах триады импульсов каждый преобразователь по одному разу выполняет функции рабочего и компенсационного.
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 1996 |
|
RU2138012C1 |
| US 4970670 А, 13.11.1990 | |||
| US 5365663 A, 22.11.1994 | |||
| US 7424823 B2, 16.09.2008. | |||

