Изобретение относится к области измерительной техники и может быть использовано для измерения координатных составляющих смещений торцов лопаток ротора относительно статора турбомашины.
Известен способ измерения радиальных смещений торцов лопаток ротора при одновременном измерении осевых смещений ротора турбомашины, при котором на статоре турбомашины устанавливают два вихретоковых преобразователя, смещенных друг относительно друга и возбуждаемых импульсами, синхронизируемыми с ее вращением, и по их сигналам оценивают координатные составляющие смещения торцов лопаток относительно указанных преобразователей в течение нескольких периодов вращения ротора турбомашины (патент РФ №2138012 «Способ измерения параметров движения лопаток ротора турбомашины», кл. G01B 7/14, 1999).
Недостатком этого способа является низкая информативность измерения из-за невозможности определения смещения торцов лопаток в направлении вращения ротора турбомашины, обусловленных изгибом пера лопатки.
Наиболее близким по технической сущности к предлагаемому изобретению является способ измерения, при котором на статоре турбомашины устанавливают кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, распределенными по статорной оболочке и расположенными на трех участках ее поверхности, на каждом из которых выбирают по одной точке, названной «виртуальным» геометрическим центром, причем первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток контролируемого колеса ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора, два из трех преобразователей включают в дифференциальную измерительную цепь с меняющимся от оборота к обороту ротора составом преобразователей или их функциями в измерительной цепи, возбуждаемой в моменты прохождения замками лопаток выбранных точек последовательностью импульсов, синхронизируемой с вращением турбомашины, преобразуют индуктивность чувствительных элементов в напряжение и фиксируют соответствующие выходному напряжению измерительной цепи цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей (Беленький Л.Б., Боровик С.Ю., Логвинов А.В., Райков Б.К., Скобелев О.П., Секисов Ю.Н., Тулупова В.В. Методы измерения смещений торцов лопаток в компрессорах и турбинах на основе распределенных кластеров датчиков. Часть 1. Обоснование предлагаемых методов и их описание. // Мехатроника, автоматизация, управление, 2009, №4, с.16-19; Беленький Л.Б., Боровик С.Ю., Райков Б.К., Скобелев О.П., Секисов Ю.Н., Тулупова В.В. Методы измерения смещений торцов лопаток в компрессорах и турбинах на основе распределенных кластеров датчиков. Часть 2. Реализуемость методов. // Мехатроника, автоматизация, управление, 2009, №5, с.21-30).
Недостатком способа является низкое быстродействие, связанное с тем, что сбор данных, необходимых для определения смещений торцов лопаток ротора, происходит в три этапа, каждый из которых занимает один оборот ротора. Кроме того, возможная в продолжении трех оборотов ротора нестабильность ранее найденного периода его вращения, которым определяется периодичность и моменты возбуждения измерительной цепи, приводит к дополнительной динамической погрешности измерения смещений торцов лопаток ротора.
Цель изобретения - повышение быстродействия и точности.
Указанная цель достигается тем, что в известном способе, при котором во взаимодействие с торцами лопаток работающей турбомашины вводят кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, распределенными по статорной оболочке и расположенными на трех участках ее поверхности, на каждом из которых выбирают по одной точке, причем первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток контролируемого колеса ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора, два из трех преобразователей включают в дифференциальную измерительную цепь с меняющимся от оборота к обороту ротора составом преобразователей измерительной цепи, возбуждаемой в моменты прохождения замками лопаток выбранных точек последовательностью импульсов, синхронизируемой с вращением турбомашины, преобразуют индуктивность чувствительных элементов в напряжение и фиксируют соответствующие выходному напряжению измерительной цепи цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей, согласно изобретению преобразования индуктивностей чувствительных элементов в цифровые коды выполняют в два этапа, длительностью каждого в один оборот ротора; частоту импульсов синхронизируемой последовательности увеличивают вдвое, на первом этапе функции рабочего и компенсационного первый и второй преобразователи выполняют, чередуясь с приходом каждого импульса синхронизируемой последовательности, на втором этапе на протяжении всего оборота функцию рабочего и компенсационного преобразователей выполняют третий и первый преобразователи соответственно.
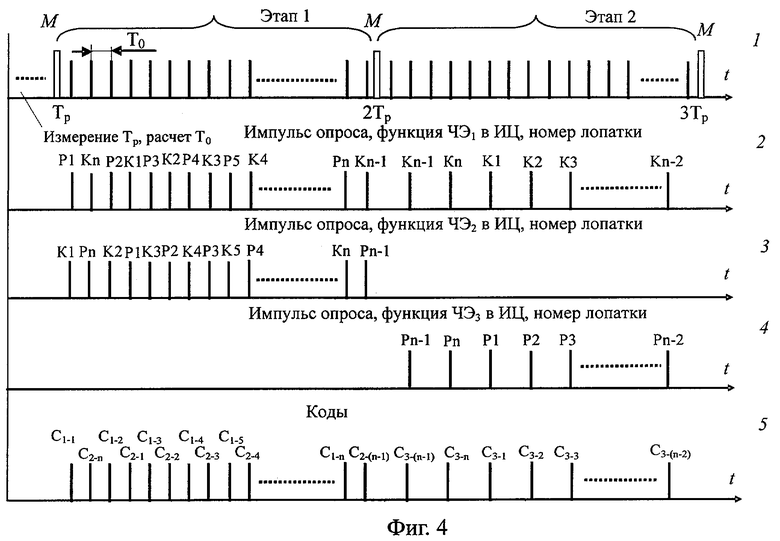
На фиг.1 представлены схематическое изображение рабочего колеса турбомашины 1, взаимное расположение точек 01, 02 и 03, при прохождении которых замками лопаток производят преобразования индуктивностей чувствительных элементов в напряжение и фиксацию результирующих кодов, и систем отсчета (показаны оси координат Y и Z, оси Х направлены перпендикулярно плоскости чертежа) с началами отсчета, совпадающими с точками 01, 02 и 03. Угловые расстояния между точками 01 и 02 составляют полтора угловых шага (Δψ) установки лопаток на колесе ротора 2, а между точками 02 и 03 - один шаг. Здесь же представлены статор 3, датчик синхронизации 4 и метка 5 на валу ротора 6.
На фиг.2 представлена схема, поясняющая (на примере трех лопаток для моментов времени, в которые происходит преобразование) расположение чувствительных элементов (ЧЭ) распределенного кластера, сформированные пары рабочих (Р) и компенсационных (К) ЧЭ на этапе 1 сбора данных: пара ЧЭ1-Р и ЧЭ2-К (фиг.2, а) при контроле 1-й лопатки, пара ЧЭ2-Р - ЧЭ1-К (фиг.2, б) при контроле n-й лопатки, пара ЧЭ1-Р - ЧЭ2-К (фиг.2, в) при контроле 2-й лопатки, а также точки 01, 02 и 03 и системы отсчета на различных этапах преобразования (показаны оси Х, Z, оси Y направлены перпендикулярно плоскости чертежа).
На фиг.3 представлена схема, поясняющая (на примере трех лопаток для моментов времени, в которые происходит преобразование) расположение чувствительных элементов (ЧЭ) распределенного кластера, сформированные пары рабочих (Р) и компенсационных (К) ЧЭ на этапе 2 сбора данных.
На фиг.4 представлены временные диаграммы, на которых показаны импульсы возбуждения измерительной цепи с периодом  , где Тр - период вращения ротора, а n - число лопаток ступени, М - импульсы синхронизации, поступающие от стандартного датчика частоты вращения (эпюра 1), моменты прохождения замками лопаток точек в зонах чувствительности первого, второго и третьего чувствительных элементов преобразователей распределенного кластера, в которых происходит преобразование их индуктивностей (эпюры 2, 3 и 4), и моменты фиксации результирующих кодов Сj-i, используемых для вычисления координатных составляющих смещения i-й лопатки после того, как с ней взаимодействовали в качестве рабочего каждый из j=1, 2, 3 одновитковых вихретоковых преобразователей, (эпюра 5), а также функции преобразователей в дифференциальной измерительной цепи при взаимодействии с лопатками - рабочего (Р) и компенсационного (К) ЧЭ.
, где Тр - период вращения ротора, а n - число лопаток ступени, М - импульсы синхронизации, поступающие от стандартного датчика частоты вращения (эпюра 1), моменты прохождения замками лопаток точек в зонах чувствительности первого, второго и третьего чувствительных элементов преобразователей распределенного кластера, в которых происходит преобразование их индуктивностей (эпюры 2, 3 и 4), и моменты фиксации результирующих кодов Сj-i, используемых для вычисления координатных составляющих смещения i-й лопатки после того, как с ней взаимодействовали в качестве рабочего каждый из j=1, 2, 3 одновитковых вихретоковых преобразователей, (эпюра 5), а также функции преобразователей в дифференциальной измерительной цепи при взаимодействии с лопатками - рабочего (Р) и компенсационного (К) ЧЭ.
Измерение искомых координат смещения торцов лопаток ротора турбомашины предлагаемым способом осуществляется следующим образом. Получению информации с распределенного кластера одновитковых вихретоковых преобразователей предшествует этап измерения периода вращения ротора турбомашины (Tр). С этой целью используют датчик частоты вращения промышленного изготовления и метку на валу ротора.
Найденные значения периода вращения Тр используют для вычисления моментов прохождения замками лопаток точек 01, 02 и 03 в зонах действия электромагнитных полей рабочих чувствительных элементов распределенного кластера, а также для определения периода тактовых импульсов Т0.
Согласно предлагаемому способу на первом этапе сбора данных длительностью в один оборот ротора измерительную цепь образует пара преобразователей с ЧЭ1 и ЧЭ2 (фиг.4, эпюры 2 и 3). Импульсы возбуждения с периодом Т0 подаются в измерительную цепь всякий раз, когда замок каждой лопатки проходит мимо одного из ЧЭ. В это время другой ЧЭ удален от смежных лопаток, которые находятся вне зоны его чувствительности, и функционирует в качестве компенсационного. Таким образом, смена функции прреобразователя в измерительной цепи с рабочей на компенсационную происходит по приходу каждого импульса. Указанные импульсы запускают процесс преобразования индуктивностей преобразователей в напряжение и далее в формирующиеся за оборот цифровые коды C1-1, С2-n, С1-2, C2-1, C1-3, .., C2-(n-1) (фиг.4, эпюра 5).
На втором этапе сбора данных также длительностью в один оборот ротора функционирует другая пара ЧЭ (фиг.4, эпюры 2 и 4), причем компенсационные функции в этой паре на протяжении всего оборота выполняет ЧЭ1 (ЧЭ1-К), а рабочим становится ЧЭ3 (ЧЭ3-Р). Преобразования завершают формированием кодов С3-(n-1), С3-n, С3-1,…, С3-(n-2) (фиг.4, эпюра 5).
Таким образом, длительность получения информации о координатах смещения составляет два периода вращения ротора (2Тр).
По завершении формирования триады кодов по каждой лопатке осуществляется вычисление координатных составляющих.
Значения координат смещений в радиальном (Y), осевом (X) направлениях и в направлении вращения (Z) для i-й лопатки находятся путем решения системы из трех уравнений, полученных на основе снятых экспериментально семейств градуировочных характеристик измерительных каналов, связывающих коды аналого-цифрового преобразования и координаты смещений. При подстановке конкретных значений кодов, полученных в моменты прохождения замком i-й лопатки точек преобразования индуктивностей ЧЭ и фиксации кодов 01, 02 и 03 (C1-i, C2-i, С3-i), и благодаря квазистатическому характеру изменения смещений торцов лопаток во времени, система уравнений для i-й лопатки принимает вид:
и решается относительно координат ее смещения X, Y, Z.
Таким образом, по сравнению с прототипом предлагаемый способ позволяет получить информацию о координатах смещений торцов лопаток, затратив на ее сбор время, соответствующее продолжительности двух, а не трех оборотов ротора. Сокращение длительности сбора информации с трех до двух оборотов ротора ведет также к повышению точности за счет снижения динамической погрешности от возможной нестабильности периода вращения ротора за уменьшившееся время сбора информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УСКОРЕННОГО ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2010 |
|
RU2454626C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТНЫХ СОСТАВЛЯЮЩИХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2008 |
|
RU2390723C1 |
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ РАБОЧИХ ЛОПАТОК ТУРБИНЫ | 2013 |
|
RU2556297C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ И ОСЕВЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ТУРБИНЫ | 2010 |
|
RU2457432C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ СИЛЫ ТЯГИ ВИНТА ЗАКАПОТИРОВАННОЙ ВИНТОВЕНТИЛЯТОРНОЙ СИЛОВОЙ УСТАНОВКИ | 2007 |
|
RU2351905C1 |
| ВИХРЕТОКОВЫЙ ДАТЧИК СО СМЕЩЕННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2021 |
|
RU2778031C1 |
| СПОСОБ ОБНАРУЖЕНИЯ КРУТИЛЬНЫХ И ИЗГИБНЫХ СМЕЩЕНИЙ ТОРЦОВ ЛОПАТОК РАБОЧЕГО КОЛЕСА ОСЕВОГО КОМПРЕССОРА ПРИ ИССЛЕДОВАНИЯХ СРЫВНЫХ ЯВЛЕНИЙ | 2006 |
|
RU2320957C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНЫХ ЗАЗОРОВ МЕЖДУ ТОРЦАМИ ЛОПАТОК РАБОЧЕГО КОЛЕСА И СТАТОРНОЙ ОБОЛОЧКОЙ ТУРБОМАШИНЫ | 2014 |
|
RU2587644C1 |
Использование: для измерения координатных составляющих смещений торцов лопаток колеса ротора относительно статора турбомашины. Сущность: производят раздельное определение смещений торцов лопаток в радиальном, осевом направлениях, а также в направлении вращения ротора с помощью трех высокотемпературных одновитковых вихретоковых преобразователей. Преобразователи размещают распределенно на статорной оболочке в пределах трех участков ее поверхности, в каждом из которых выбирают по одной точке, находящейся в зоне чувствительности соответствующего преобразователя. Первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток на контролируемом колесе ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора. Преобразование индуктивностей чувствительных элементов в напряжения и фиксацию соответствующих кодов проводят в два этапа длительностью один оборот ротора каждый. На первом этапе функции рабочего и компенсационного выполняют, чередуясь с приходом каждого импульса синхронизируемой последовательности, первый и второй чувствительные элементы. На втором этапе в течение всего оборота третий чувствительный элемент является рабочим, а первый - компенсационным. Технический результат: повышение быстродействия за счет сокращения времени сбора информации и точности за счет снижения динамической погрешности от возможной нестабильности периода вращения ротора за уменьшившееся время сбора информации. 4 ил.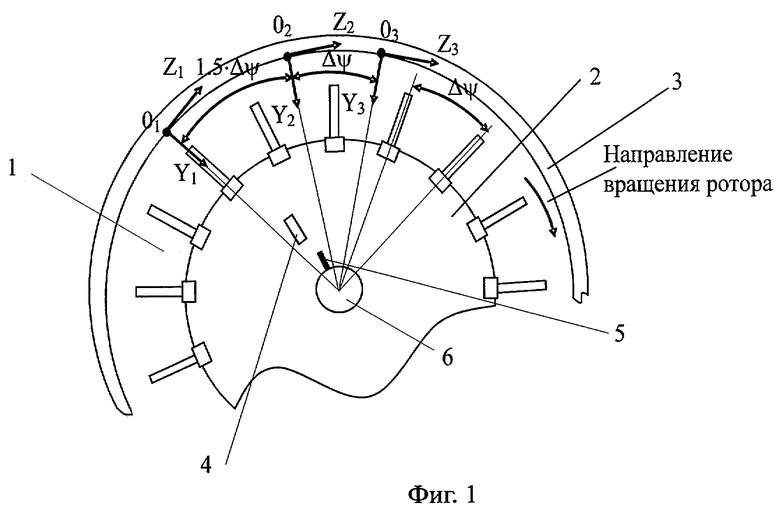
Способ измерения координатных составляющих смещений торцов лопаток ротора турбомашины, при котором во взаимодействие с торцами лопаток работающей турбомашины вводят кластер из трех высокотемпературных одновитковых вихретоковых преобразователей с чувствительными элементами в виде отрезка проводника, распределенными по статорной оболочке и расположенными на трех участках ее поверхности, на каждом из которых выбирают по одной точке, причем первая и вторая точки отстоят друг от друга на полтора угловых шага установки лопаток контролируемого колеса ротора, а вторая и третья - на один угловой шаг в направлении вращения ротора, два из трех преобразователей включают в дифференциальную измерительную цепь с меняющимся от оборота к обороту ротора составом преобразователей в измерительной цепи, возбуждаемой в моменты прохождения замками лопаток выбранных точек последовательностью импульсов, синхронизируемой с вращением турбомашины, преобразуют индуктивность чувствительных элементов в напряжение и фиксируют соответствующие выходному напряжению измерительной цепи цифровые коды, а по ним определяют координатные составляющие смещений торцов лопаток путем решения системы из трех уравнений на основе семейств градуировочных характеристик преобразователей, отличающийся тем, что преобразования индуктивностей чувствительных элементов в цифровые коды выполняют в два этапа длительностью каждого в один оборот ротора; частоту импульсов синхронизируемой последовательности увеличивают вдвое, на первом этапе функции рабочего и компенсационного первый и второй преобразователи выполняют, чередуясь с приходом каждого импульса синхронизируемой последовательности, на втором этапе на протяжении всего оборота функцию рабочего и компенсационного преобразователей выполняют третий и первый преобразователи соответственно.
| СПОСОБ ИЗМЕРЕНИЯ МНОГОМЕРНЫХ ПЕРЕМЕЩЕНИЙ И ОБНАРУЖЕНИЯ КОЛЕБАНИЙ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 2002 |
|
RU2272990C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРЦОВ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2231750C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЛОПАТОК РОТОРА ТУРБОМАШИНЫ | 1996 |
|
RU2138012C1 |
| US 4970670 A, 13.11.1990 | |||
| US 5365663 A, 22.11.1994 | |||
| US 7424823 B2, 16.09.2008. | |||

