Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока, и может использоваться для минимизации потерь электроэнергии при питании асинхронных электродвигателей, применяемых для насосов, вентиляторов и других машин и механизмов.
Известен «Способ управления многофазным инвертором и устройство для его осуществления» (патент РФ на изобретение №1458951), содержащий инвертор, силовые выходы которого через датчики фазного тока подключены к статорным обмоткам асинхронного электродвигателя, а управляющие входы, через блок формирования управляющих импульсов, и связанный с датчиками фазного тока блок ШИМ-регулятров тока соединены с выходами прямого преобразователя двухфазно-трехфазных координат, выходы которого подключены к выходам прямого преобразователя декартовых координат, при этом ортофазный и синфазный входы прямого преобразователя декартовых координат соединены с выходами соответственно регулятора ортофазного тока и регулятора синфазного тока, задающий вход регулятора ортофазного тока подключен к выходу регулятора момента, вход которого соединен с выходом регулятора скорости, задающим входом подключенного к блоку задания скорости.
Существенными признаками, общими с заявляемым устройством, являются: преобразователь двухфазно-трехфазных координат (в заявляемом устройстве блок фазных преобразований), преобразователь декартовых координат (в заявляемом устройстве блок координатных преобразований), контура регулирования токов статора, асинхронный двигатель.
Причинами, препятствующими достижению технического результата, являются следующие недостатки аналога: высокие потери электроэнергии в асинхронном двигателе.
Известно устройство «Трансвектор» (Чиликин М.Г., Ключев В.И., Сандлер А.С. Теория автоматизированного электропривода. - М.: Энергия, 1979, с.431-437, рис.9-19), которое содержит блок регулирования переменных; контур регулирования намагничивающей составляющей тока статора и контур регулирования активной составляющей тока статора; первый и второй блоки координатных преобразований; блок векторного фильтра; первый, второй и третий блоки фазных преобразований; преобразователь частоты; блок датчиков тока фаз статора; блок датчиков главного потокосцепления двигателя; датчик угловой скорости; асинхронный двигатель; причем выходы блока регулирования переменных соединены с входами первого блока координатных преобразований, дополнительные входы первого блока координатных преобразований соединены с выходами блока векторного фильтра; выходы первого блока координатных преобразований соединены с входами первого блока фазных преобразований; входы первого блока фазных преобразований соединены с управляющими входами преобразователя частоты, выходы которого соединены с асинхронным двигателем; в воздушном зазоре асинхронного двигателя установлен блок датчиков главного потокосцепления, выходы которого соединены с входами третьего блока фазных преобразований; дополнительные входы третьего блока фазных преобразований соединены с выходами второго блока фазных преобразований, входы которого соединены с выходами блока датчиков тока фаз статора; выходы третьего блока фазных преобразований соединены с входами блока векторного фильтра; выходы второго блока фазных преобразований соединены с входами второго блока координатных преобразований, дополнительные входы которого соединены с дополнительными выходами блока векторного фильтра; выходы блока векторного фильтра, второго блока координатных преобразований и датчика угловой скорости двигателя, механически связанного с валом двигателя, соединены с входами блока регулирования.
Недостатками аналога является снижение коэффициента полезного действия (КПД) асинхронного двигателя при изменении момента нагрузки.
Из всех известных устройств наиболее близким по технической сущности к заявляемому устройству является «Система векторного управления скоростью асинхронного двигателя» (патент РФ на изобретение №2422979, патент на полезную модель №100688).
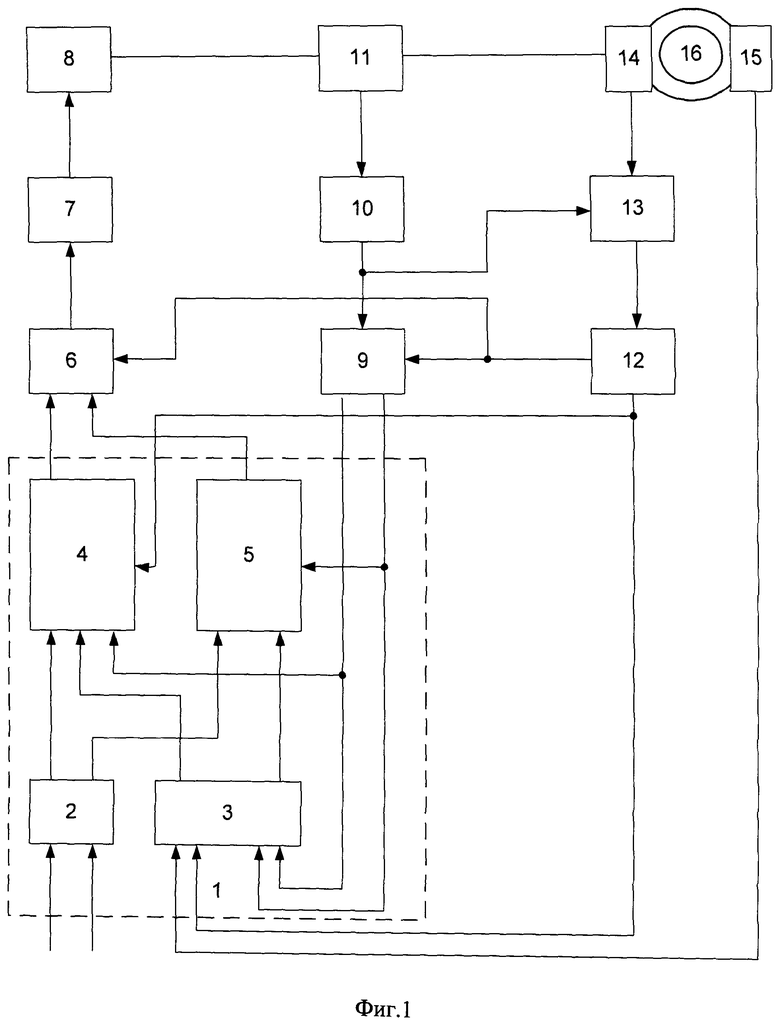
На фиг.1 изображена структурная схема «Система векторного управления скоростью асинхронного двигателя», содержащая: 1 - блок регулирования переменных; 2 - модуль вычисления экстремальных значений составляющих тока статора; 3 - модуль вычисления электродвижущей силы (ЭДС) и перекрестных связей; 4 - контур регулирования намагничивающей составляющей тока статора; 5 - контур регулирования активной составляющей тока статора; 6 - первый блок координатных преобразований; 7 - первый блок фазных преобразований; 8 - преобразователь частоты; 9 - второй блок координатных преобразований; 10 - второй блок фазных преобразований; 11 - блок датчиков тока фаз статора; 12 - блок векторного фильтра; 13 - третий блок фазных преобразований; 14 - блок датчиков главного потокосцепления; 15 - датчик угловой скорости; 16 - асинхронный двигатель.
Существенными признаками прототипа, общими с заявляемым устройством, являются: блок регулирования переменных, состоящий из модуля вычисления экстремальных значений проекций тока статора, из модуля вычисления электродвижущей силы и перекрестных связей, контура регулирования намагничивающей составляющей тока статора и контура регулирования активной составляющей тока статора, а также из первого блока координатных преобразований, первого блока фазных преобразований; преобразователя частоты; второго блока координатных преобразований; второго блока фазных преобразований; блока датчиков тока фаз статора; блока векторного фильтра; третьего блока фазных преобразований и асинхронного двигателя.
Недостатком прототипа являются необходимость наличия датчика угловой скорости, механически связанного с валом ротора асинхронного двигателя, а также наличия блока датчиков главного потокосцепления, размещенных в зазоре статора, что приводит к ограничению применения системы векторного управления скоростью асинхронного двигателя.
Задачей предполагаемого изобретения является замена датчика угловой скорости, механически связанного с валом ротора асинхронного двигателя, а также блока датчиков главного потокосцепления, размещенных в зазоре статора, на блок вычисления, который, при условии незначительных вариациях внешнего момента Мс и на основании параметров асинхронного
двигателя и тока фаз, позволяет рассчитывать значения угловой скорости и потокосцепления, что дает возможность поддержания максимального и постоянного КПД асинхронного двигателя при незначительном изменении внешнего момента Мс
Для достижения технического результата устройство векторного управления скоростью асинхронного двигателя содержит блок регулирования переменных, состоящий из модуля вычисления экстремальных значений проекций тока статора, модуля вычисления электродвижущей силы и перекрестных связей, контура регулирования намагничивающей составляющей тока статора и контура регулирования активной составляющей тока статора, причем первый вход контура регулирования намагничивающей составляющей тока статора соединен с первым выходом модуля вычисления экстремальных значений проекций тока статора, на входы которого поступают сигналы заданной угловой скорости двигателя и момента сопротивления, соответствующего этой скорости; первый выход контура регулирования намагничивающей составляющей тока статора соединен с первым входом первого блока координатных преобразований, а второй вход первого блока координатных преобразований соединен с выходом контура регулирования активной составляющей тока статора; выход первого блока координатных преобразований соединен со входом первого блока фазных преобразований, а выход первого блока фазных преобразований соединен со входом преобразователя частоты; первый вход контура регулирования активной составляющей тока статора соединен со вторым выходом модуля вычисления экстремальных значений проекций тока статора, второй вход контура регулирования активной составляющей тока статора соединен со вторым выходом модуля вычисления электродвижущей силы и перекрестных связей, причем первый выход модуля вычисления электродвижущей силы и перекрестных связей соединен со вторым входом контура регулирования намагничивающей составляющей тока статора; на входы модуля вычисления электродвижущей силы и перекрестных связей поступают сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований, по величине главного потокосцепления ротора с выхода блока векторного фильтра, также выход векторного фильтра соединен с четвертым входом контура регулирования намагничивающей составляющей тока статора, второй выход векторного фильтра соединен с вторым входом второго блока координатных преобразований, а также с третьим входом первого блока координатных преобразований, вход векторного фильтра соединен с выходом третьего блока фазных преобразований; один из выходов второго блока координатных преобразований соединен с третьим входом контура регулирования намагничивающей составляющей тока статора, второй выход второго блока координатных преобразований соединен с третьим входом контура регулирования активной составляющей тока статора; вход второго блока координатных преобразований соединен с выходом второго блока фазных преобразований, а также со вторым входом третьего блока фазных преобразований, вход третьего блока фазных преобразований соединен с выходом блока датчиков тока фаз статора.
Для достижения технического результата вместо датчика угловой скорости, механически связанного с валом ротора асинхронного двигателя, а также блока датчиков главного потокосцепления, которые необходимо размещать в зазоре статора, используется вычислительный блок для расчета величины главного потокосцепления и угловой скорости на основании параметров асинхронного двигателя и тока фаз статора.
На фиг.2 приведена структурная схема заявляемого «Устройства векторного управления скоростью асинхронного двигателя», где:
1 - блок регулирования переменных;
2 - модуль вычисления экстремальных значений составляющих тока статора;
3 - модуль вычисления электродвижущей силы (ЭДС) и перекрестных связей;
4 - контур регулирования намагничивающей составляющей тока статора;
5 - контур регулирования активной составляющей тока статора;
6 - первый блок координатных преобразований;
7 - первый блок фазных преобразований;
8 - преобразователь частоты;
9 - второй блок координатных преобразований;
10 - второй блок фазных преобразований;
11 - блок датчиков тока фаз статора;
12 - блок векторного фильтра;
13 - третий блок фазных преобразований;
14 - вычислительный блок;
15 - асинхронный двигатель.
Блок регулирования переменных (1) содержит модуль вычисления экстремальных значений проекций тока статора (2), модуль вычисления электродвижущей силы и перекрестных связей (3), причем первый вход контура регулирования намагничивающей составляющей тока статора (4) соединен с первым выходом модуля вычисления экстремальных значений проекций тока статора (2), на входы которого поступают сигналы заданной угловой скорости двигателя и момент сопротивления, соответствующего этой скорости; выход контура регулирования намагничивающей составляющей тока статора (4) соединен с первым входом первого блока координатных преобразований (6), выход которого соединен со входом первого блока фазных преобразований (7), второй вход первого блока фазных преобразований (6) соединен с выходом контура регулирования активной составляющей тока статора (5), выход первого блока фазных преобразований (7) соединен с входом преобразователя частоты (8); первый вход контура регулирования активной составляющей тока статора (5) соединен со вторым выходом модуля вычисления экстремальных значений проекций тока статора (2), второй вход контура регулирования активной составляющей тока статора (5) соединен со вторым выходом модуля вычисления электродвижущей силы и перекрестных связей (3), причем первый выход модуля вычисления электродвижущей силы и перекрестных связей (3) соединен со вторым входом контура регулирования намагничивающей составляющей тока статора (4); на входы модуля вычисления электродвижущей силы и перекрестных связей (3) поступают сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований (9), а по величине потокосцепления ротора с выхода блока векторного фильтра (12), также выход векторного фильтра (12) соединен с четвертым входом контура регулирования намагничивающей составляющей тока статора (4), вход векторного фильтра (12) соединен с выходом второго блока фазных преобразований (13); второй выход векторного фильтра (12) соединен со вторым входом второго блока координатных преобразований (9), а также с третьим входом первого блока координатных преобразований (6); первый выход второго блока координатных преобразований (9) соединен с третьим входом контура регулирования намагничивающей составляющей тока статора (4), второй выход второго блока координатных преобразований (9) соединен с третьим входом контура регулирования активной составляющей тока статора (5); первый вход второго блока координатных преобразований (9) соединен с выходом третьего блока фазных преобразований (10) и со вторым входом второго блока фазных преобразований (13), вход которого соединен с первым выходом вычислительного блока (14); вход третьего блока фазных преобразований (10) соединен с выходом блока датчиков тока фаз статора (11); на вход модуля вычисления электродвижущей силы и перекрестных связей (3) поступают сигналы по угловой скорости со второго выхода вычислительного блока (14), выход блока датчиков тока фаз статора (11) соединен с входом вычислительного блока (14), на второй вход которого поступают параметры асинхронного двигателя.
Работа заявляемого устройства может быть описана следующим образом: вычислительный блок 14 на основе сигналов блока датчиков тока фаз статора двигателя 11 и параметров асинхронного двигателя вычисляет значения физических переменных асинхронного двигателя 15, третий блок фазных преобразований 13, второй блок фазных преобразований 10, второй блок координатных преобразований 9 и блок векторного фильтра 12 осуществляют трехфазно-двухфазное преобразование токов статора, пересчет значений токов из неподвижной системы координат (α, β), связанную со статором электродвигателя в систему координат (x, y), вращающуюся синхронно с магнитным полем электродвигателя и ориентированную по вектору потокосцепления ротора, а также вычисляют значение модуля вектора потокосцепления ротора. Вычисленные значения isx, isy, ψr и ω являются сигналами обратных связей, поступающих на вход блока регулирования переменных 1. Блок регулирования переменных 1 на основании сигналов обратных связей и заданного значения скорости формирует на своих выходах сигналы, соответствующие заданным значениям проекций напряжения статора usx и usy. Эти сигналы, проходя
через первый блок координатных преобразований 6 и первый блок фазных преобразований 7, преобразуются в фазные напряжения, поступающие на входы преобразователя частоты 8, тем самым, задавая необходимый режим работы двигателя.
Введение в структуру управления вычислительного блока позволяет избежать основного недостатка применения «Системы векторного управления скоростью асинхронного двигателя», т.к. дает возможность избежать установки датчика угловой скорости, механически связанного с валом ротора асинхронного двигателя, и избежать установки блока датчиков главного потокосцепления, размещаемых в зазоре статора, но при этом увеличивается относительная погрешность КПД асинхронного двигателя.
Для устройства векторного управления скоростью асинхронного двигателя, КПД асинхронного двигателя определяется выражением:
где 

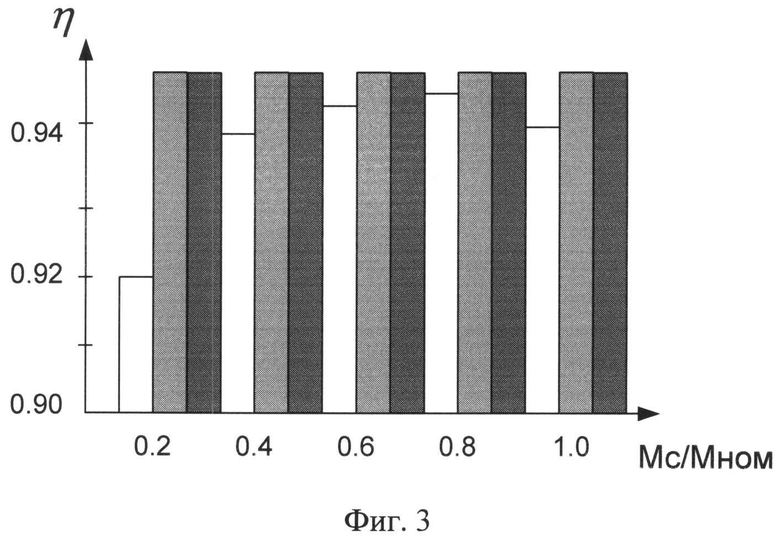
На фиг.3 представлены полученные в ходе компьютерного моделирования сравнительные диаграммы КПД асинхронного электродвигателя типа 4A200L4 при управлении с помощью системы «Трансвектор» (светлые колонки), с помощью «Системы векторного управления скоростью асинхронного двигателя» (серые колонки) и при управлении с помощью заявляемого устройства (черные колонки).
Результаты эксперимента в полной мере подтверждают аналитические выкладки и позволяют сделать следующие выводы. В условиях незначительной вариации внешнего момента Мс КПД электродвигателя η, при управлении посредством заявляемого устройства, постоянен и максимален. Управление двигателем с помощью заявляемого устройства позволяет поддерживать максимальный КПД при любом допустимом значении Мс с относительной погрешностью не более 4%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| Электропривод переменного тока | 1981 |
|
SU1026272A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1585894A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
Изобретение относится к электротехнике, в частности к регулируемым приводам переменного тока, и может быть использовано для минимизации потерь электроэнергии при питании асинхронных электродвигателей, применяемых для насосов, вентиляторов и других машин и механизмов. Технический результат заключается в поддержании максимального и постоянного КПД двигателя во всем допустимом диапазоне изменения внешнего момента при заданной угловой скорости. Технический результат достигается тем, что в структуру предложенного устройства вводится вычислительный блок, который в условиях незначительной вариации внешнего момента Мс рассчитывает параметры скорости и потокосцепления. Это позволяет без применения датчика скорости, механически связанного с валом двигателя, и блока датчиков главного потокосцепления, размещаемых в зазоре статора, поддерживать максимальный и постоянный КПД двигателя во всем допустимом диапазоне изменения внешнего момента при заданной угловой скорости. 3 ил.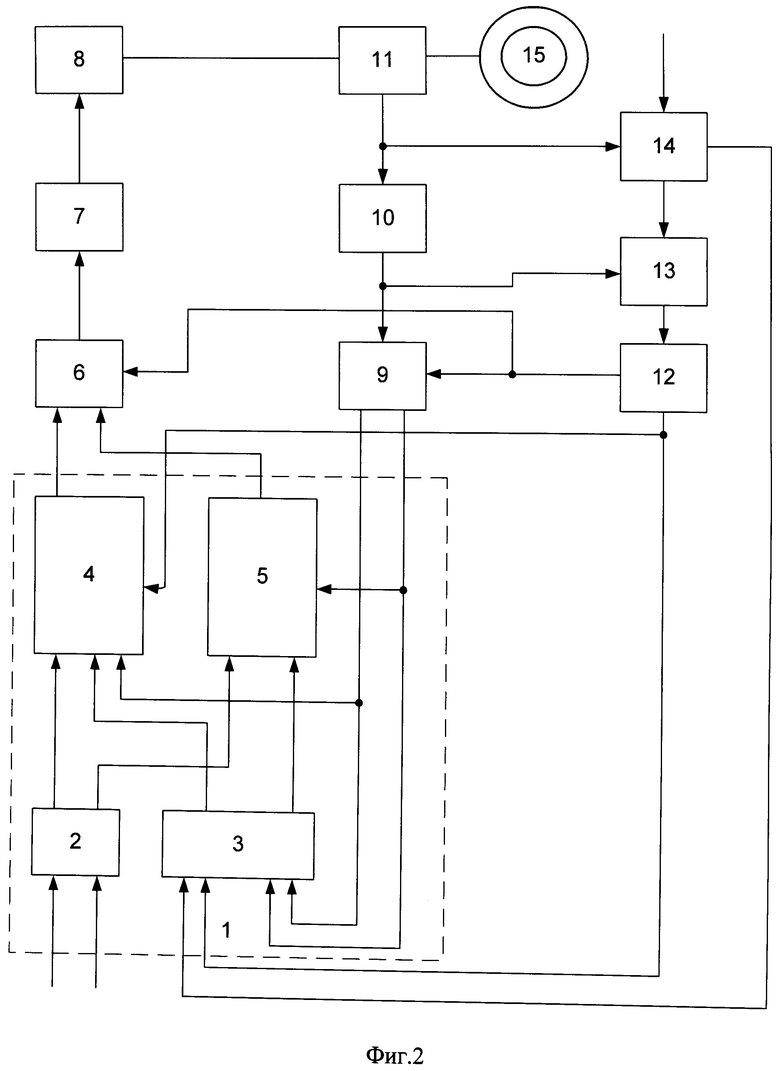
Устройство векторного управления скоростью асинхронного двигателя, содержащее блок регулирования переменных, состоящий из модуля вычисления экстремальных значений проекций тока статора, модуля вычисления электродвижущей силы и перекрестных связей, контура регулирования намагничивающей составляющей тока статора и контура регулирования активной составляющей тока статора, причем первый вход контура регулирования намагничивающей составляющей тока статора соединен с первым выходом модуля вычисления экстремальных значений проекций тока статора, на входы которого поступают сигналы заданной угловой скорости двигателя и момента сопротивления, соответствующего этой скорости; первый выход контура регулирования намагничивающей составляющей тока статора соединен с первым входом первого блока координатных преобразований, второй вход первого блока координатных преобразований соединен с выходом контура регулирования активной составляющей тока статора; выход первого блока координатных преобразований соединен с входом первого блока фазных преобразований, а выход первого блока фазных преобразований соединен с входом преобразователя частоты; первый вход контура регулирования активной составляющей тока статора соединен с вторым выходом модуля вычисления экстремальных значений проекций тока статора, второй вход контура регулирования активной составляющей тока статора соединен со вторым выходом модуля вычисления электродвижущей силы и перекрестных связей, причем первый выход модуля вычисления электродвижущей силы и перекрестных связей соединен со вторым входом контура регулирования намагничивающей составляющей тока статора; на входы модуля вычисления электродвижущей силы и перекрестных связей поступают сигналы обратных связей по намагничивающей и активной составляющим тока статора с выходов второго блока координатных преобразований, по величине главного потокосцепления ротора с выхода блока векторного фильтра, также выход векторного фильтра соединен с четвертым входом контура регулирования намагничивающей составляющей тока статора, вход векторного фильтра соединен с выходом третьего блока фазных преобразований, второй выход векторного фильтра соединен со вторым входом второго блока координатных преобразований и третьим входом первого блока координатных преобразований; первый выход второго блока координатных преобразований соединен с третьим входом контура регулирования намагничивающей составляющей тока статора, второй выход второго блока координатных преобразований также соединен с третьим входом контура регулирования активной составляющей тока статора, вход второго блока координатных преобразований соединен с выходом второго блока фазных преобразований и со вторым входом третьего блока фазных преобразований; вход второго блока фазных преобразований соединен с выходом блока датчиков тока фаз статора, отличается тем, что для поддержания максимального и постоянного КПД при изменении внешнего момента асинхронного электродвигателя путём вычисления значений потокосцепления и угловой скорости на основании параметров асинхронного двигателя и тока фаз статора введён вычислительный блок, при этом один выход вычислительного блока соединен с входом третьего блока фазных преобразований, а второй соединен с входом модуля вычисления электродвижущей силы (ЭДС) и перекрестных связей, на один из входов вычислительного блока вводятся параметры асинхронного двигателя, а второй соединен с выходом блока датчиков тока фаз статора.
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| US 7180262 B2, 20.02.2007 | |||
| US 20020060549 A1, 23.05.2002 | |||
| Затвор открытого регулирующего сооружения | 1988 |
|
SU1684410A1 |

