Изобретение относится к способам и средствам диагностики газопроводов в труднодоступных местах, например на обширных подводных участках, и направлено на решение вопросов повышения точности и надежности определения координат прибора, предназначенного для инспекции трубопровода, который движется внутри трубы.
Известны приборы для инспекции трубопровода, состоящие из носителя, устройства для его стабилизации и перемещения внутри трубопровода в продольном направлении, устройств, содержащих датчики для проверки состояния трубопровода, электрический генератор электропитания приборов. [См. патент РФ N 2068148 по заявке N 94011991/06 от 04.04.94].
Основным достоинством таких приборов для инспекции трубопроводов является их автономность, возможность проведения инспекции трубопровода на обширных труднодоступных участках без прекращения перекачки по трубопроводу топлива.
Однако решения-аналоги имеют ряд существенных недостатков, не позволяющих использовать их для определения координат дефектных участков трубопровода и определения места утечек перекачиваемого продукта. Отсутствие в их составе средств определения координат внутритрубного носителя не позволяет осуществлять "привязку" координат дефектных участков трубопровода к координатам носителя.
Отмеченные недостатки частично устранены в робототехническом комплексе для внутреннего контроля герметичности магистрального газопровода, включающем стартовую и финишную позиции, маркеры дистанции на трубе, мобильный внутренний зонд, содержащий последовательно соединенные блок датчиков течи, блок коммутации и аналого-цифрового преобразования и бортовое вычислительное и документирующее устройство, а также схему контроля и последовательно соединенные ответчик прохода маркера и блок датчиков дистанции [Амфилохиев В.Б., Белов Б. П. , Гурьев Ю.В., Матвеев В.М., Щукин А.Е. Всероссийская научно-техническая конференция: "Научно-технические проблемы создания средств подъема и утилизации затонувших объектов". Тезисы докладов, СПб ГМТУ, Санкт-Петербург, 1994, стр. 46 - 47] - прототип.
Достоинством указанного робототехнического комплекса является высокая надежность обнаружения течи с расходом 3-10 л/с и небольшой объем электронного блока (10 л), обеспечиваемый электропитанием от 4 батарей НБ НКП80 и 20 батареями НКП7А. Алгоритм работы адаптивных информационно-измерительных систем комплекса включает в себя адаптацию порога измерителей и анализ проходной характеристики течи, принятие решения, запоминание положения течи, вычисление и запоминание дистанции, что позволяет "привязать" координаты дефектного участка трубопровода к координатам внутритрубного зонда. Однако недостатком указанного технического решения является недостаточно высокая точность измерения координат зонда (точность не выше 3 м) при большом числе маркеров (50), устанавливаемых на трубе, что требует больших расходов на проведение инспекции трубопровода. Кроме того, в случае аварии, сопряженной с повреждением маркера, точность определения места внутритрубного зонда резко снижается, что не позволяет в полной мере использовать робототехнический комплекс при проведении аварийно-восстановительных работ.
Задачей заявляемого изобретения является устранение отмеченных недостатков, а именно повышение точности измерения координат внутритрубного зонда при обеспечении возможности измерения координат в аварийных случаях, связанных с выходом из строя или отсутствием маркеров дистанции на трубе.
Технический результат достигается включением новых блоков и иной, отличной от решения-прототипа, связью между блоками в робототехническом комплексе для диагностики и внутреннего контроля герметичности магистрального газопровода, включающими стартовую и финишную позиции, маркеры дистанции на трубе, мобильный внутритрубный зонд, содержащий последовательно соединенные блок датчиков течи, блок коммутации и аналого-цифрового преобразования и бортовое вычислительное и документирующее устройство, а также схему контроля и последовательно соединенные ответчик прохода маркера и блок датчиков дистанции, заключающихся в том, что в него дополнительно введены блок синхронизации, два излучателя магнитных волн, передатчик, приемник, приемник магнитных волн, навигационный вычислитель и блок связи, выполненный в виде последовательно соединенных блоков "НЕ", "И" и "ИЛИ", причем блок синхронизации, первый излучатель магнитных волн и передатчик установлены на стартовой позиции, приемник и второй излучатель магнитных волн установлены на финишной позиции, приемник магнитных волн, навигационный вычислитель и блок связи установлены в мобильном внутритрубном зонде, при этом выход блока датчиков дистанции подсоединен к второму входу блока "ИЛИ", выход которого соединен с вторым входом блока коммутации и аналого-цифрового преобразователя, вход блока "НЕ" соединен с выходом ответчика прохода маркера, а выход приемника магнитных волн соединен с вторым входом блока "И" через навигационный вычислитель, вход первого излучателя магнитных волн соединен с первым выходом блока синхронизации, второй выход которого соединен с входом передатчика, выход приемника соединен с входом второго излучателя магнитных волн.
Идея предложенного технического решения заключается в использовании участка магистрального газопровода в качестве круглого волновода, по которому распространяются электромагнитные волны с известными амплитудно-временными характеристиками, излучаемые с обоих концов участка излучателями, установленными на стартовой и финишной позициях. Методами радионавигации, в настоящее время широко применяемыми в спутниковой навигации в таких системах, как американской "GPS" ("NAVSTAR") и российский "ГЛОНАС", может быть обеспечена очень высокая точность определения координат приемокоординатора, помещенного в поле таких электромагнитных волн. Особенно если учесть такую важную особенность определения местоположения внутритрубного зонда, как необходимость определения фактически только одной его координаты (дальности) от стартовой или финишной позиции и неподвижность излучателей, то можно предположить, что в данном случае, по сравнению с точностью спутниковых навигационных систем, измеряющих три координаты приемокоординатора, при непрерывном изменении местоположения излучателей (спутников), точность определения координат мобильного внутритрубного зонда может быть доведена до нескольких сантиметров.
Покажем существенность отличительных признаков.
Введение двух излучателей магнитных волн, блока синхронизации, передатчика и приемника, а также установление блока синхронизации, первого излучателя магнитных волн и передатчика на стартовой позиции, а приемника и второго излучателя магнитных волн - на финишной позиции являются новым решением. Оно обеспечивает создание внутри круглого в сечении трубопровода поля электромагнитных волн, которые могут распространяться в круглом волноводе (в качестве которого и служит круглый в сечении трубопровод).
Как известно [см. Изюмова Т.И., Свиридов В.Т. Волноводы, коаксиальные и полосковые линии. - М.: Энергия, 1975, стр. 16 - 17, Ефимов И.Е., Шермина Г. А. Волноводные линии передачи. - М.: Связь, 1979, стр. 61 - 63], к типам волн, которые могут распространяться в круглых волноводах, относятся, в частности, H-волны, у которых вектор напряженности магнитного поля H наряду с поперечными, имеет продольную составляющую, а вектор электрического поля E расположен полностью в плоскости поперечного сечения волновода, т.е. имеет только поперечные составляющие. Такие волны называются магнитными волнами. Большое значение для практического использования круглых волноводов имеет волна типа H01, отличительной особенностью которой является наличие только кольцевых токов в стенках волновода, что позволяет в волноводе использовать технологические фланцы с диэлектрическими прокладками без существенных потерь энергии.
Введение блока синхронизации обеспечивает одновременность излучения магнитных волн обоими излучателями, расположенными друг от другого на значительном расстоянии. Этой цели служат также передатчик и приемник, обеспечивающие передачу сигнала на начало излучения излучателем, установленным на финишной позиции, синхронно с излучателем, установленным на стартовой позиции.
Устройство блока синхронизации, первого излучателя магнитных волн и передатчика на стартовой позиции и их связь между собой является применительно к рассматриваемым робототехническим комплексам для внутреннего контроля магистральных газопроводов также новым решением. Оно обеспечивает юстировку системы определения координат внутритрубного зонда перед его стартом с места его размещения на стартовой позиции.
Введение в робототехнический комплекс приемника магнитных волн, навигационного вычислителя и блока связи и установка их в мобильном внутритрубном зонде является новым решением. Оно обеспечивает определение координат внутритрубного зонда в процессе его движения внутри трубопровода с использованием методов радионавигации за счет измерения параметров электромагнитного поля, созданного излучателями магнитных волн внутри трубопровода.
Введение блока связи в схему внутритрубного зонда и выполнение блока связи в виде последовательно соединенных блоков "НЕ", "И" и "ИЛИ", а также связь его с другими блоками зонда является новым для робототехнических комплексов подобного рода техническим решением. Оно обеспечивает возможность передачи информации от приемокоординатора, представленного приемником магнитных волн и навигационным вычислителем, к бортовому вычислительному и документирующему устройству через блоки коммутации и аналого-цифрового преобразователя.
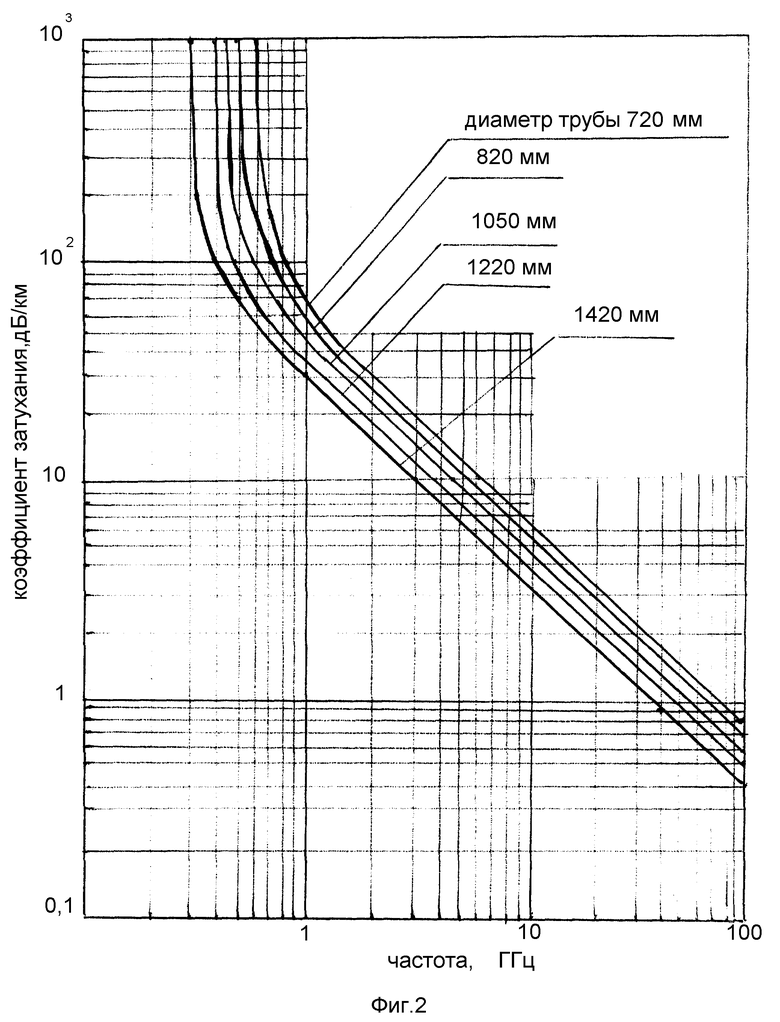
Сущность предлагаемого технического решения поясняется чертежами, где на фиг. 1 представлена схема предлагаемого робототехнического комплекса для внутреннего контроля герметичности газопровода, а на фиг. 2 - иллюстрация зависимости коэффициента затухания магнитных волн в круглом волноводе от частоты излучения и диаметра волновода, определяющего дальность определения координат внутритрубного зонда.
Робототехнический комплекс (фиг. 1) содержит:
Блок 1 - стартовая позиция.
Блок 2 - финишная позиция.
Блок 3 - трубопровод.
Блок 4 - маркер дистанции.
Блок 5 - внутритрубный зонд.
Блок 6 - блок датчиков течи.
Блок 7 - блок коммутации и аналого-цифрового преобразования.
Блок 8 - бортовое вычислительное и документирующее устройство.
Блок 9 - схема контроля.
Блок 10 - ответчик прохода маркера дистанции.
Блок 11 - блок датчиков дистанции.
Блоки 1-11 характеризуют прототип.
Дополнительно к блокам 1-11 в робототехнический комплекс для внутреннего контроля герметичности магистрального газопровода введены следующие блоки.
Блок 12 - блок синхронизации.
В качестве такого блока может использоваться формирователь - устройство, преобразующее с помощью усилительных приборов кривые тока одной формы в кривые тока других форм, в частности, в регулярно повторяющиеся импульсы определенной формы, длительности и скважности [см. М.Л.Каганов, Промышленная электроника. - М.: Высшая школа, 1968, стр. 200]. Такой формирователь, используемый в качестве блока 12, должен иметь два канала (два выхода), временной интервал между импульсами, генерируемыми в каждом из указанных каналов, определяется из соотношения:
где τ - время задержки генерирования импульса в первом канале относительно второго канала, с;
l - расстояние между излучателями магнитных волн, км;
c - скорость распределения магнитных волн в трубопроводе, км/с.
Блоки 13 и 14 - соответственно первый и второй излучатели магнитных волн.
Для возбуждения волн H01 в круглом металлическом трубопроводе возможно использование в качестве излучателя продольной щели или петли, расположенной в плоскости поперечного сечения трубопровода [см. Изюмова Т.И., Свиридов В. Т. Волноводы, коаксиальные и полосковые линии. - М.: Энергия, 1975, стр. 27 - 28]. Частоту возбуждаемых колебаний можно определить из соотношения
где f - частота магнитных волн, Гц;
c - скорость света, м/с;
a - радиус сечения трубопровода, м.
Так как диаметр применяемых магистральных газопроводов составляет 1420; 1220; 1020; 820 и 720 мм, то в соответствии с соотношением (2) для магистральных газопроводов частоты возбуждаемых в излучателях магнитных волн 13 и 14 колебаний должны быть соответственно не менее 257; 300; 358; 446 и 508 МГц.
Блок 15 - передатчик. В качестве него может использоваться радиопередатчик, обеспечивающий радиосвязь на расстоянии, соответствующем удалению финишной позиции 2 и стартовой позиции 1.
Блок 16 - приемник. В качестве него может использоваться радиоприемник, работающий на частоте передатчика 15.
Блок 17 - приемник магнитных волн. В качестве него может использоваться один из известных приемников СВЧ диапазона (работающий в диапазоне выше соответственно 257; 300; 358; 446 и 508 МГц). [См. вышеприведенный источник, стр. 4].
Блок 18 - навигационный вычислитель. В качестве него может использоваться, в частности, вычислитель, применяемый в приемокоординаторе "Челн", разработанном украинским КБ "Орион" при участии петербургского Государственного научно-исследовательского навигационного гидрографического института Министерства Обороны РФ и предназначенном для непрерывного определения координат объектов и обеспечения движения по заданному маршруту [см. "Челн" уместится в солдатском котелке. "Санкт-Петербургские ведомости" от 4 августа 1994 г.].
Блок 19 - блок связи. Он представляет собой последовательно соединенные блок "НЕ" 20, блок "И" 21 и блок "ИЛИ" 22. Вход блока "НЕ" 20 подсоединен к выходу блока 10 - ответчика прохода маркера дистанции. Второй вход блока "И" 21 подсоединен к выходу приемника магнитных волн 17 через навигационный вычислитель 18. Второй вход блока "ИЛИ" 22 подсоединен к выходу блока датчиков дистанции 11, а выход блока "ИЛИ" 22 подсоединен к второму входу блока коммутации и аналого-цифрового преобразования 7.
Блоки 23 и 24 - усилители магнитных волн. Введение указанных блоков в схему предлагаемого робототехнического комплекса необходимо в том случае, когда расстояние между стартовой 1 и финишной 2 позициями превышает так называемую длину усилительного участка, определяемую затуханием энергии магнитной волны в стенках волновода [см. Ефимов И.Е., Шермина Г.А. Волноводные линии передачи. - М.: Связь, 1979. стр. 64 - 65].
Коэффициент затухания для волны α в круглом трубопроводе, заполненном газом, можно оценить из соотношения [см. вышеуказанный источник, стр. 51, 62]:
где α - коэффициент затухания, дБ/м;
K - коэффициент, учитывающий материал стенок трубопровода;
λ - длина волны, м.
Коэффициент K определяется из соотношения:
где ρ и ρCu - соответственно удельное сопротивление материала стенок трубопровода и меди (ρCu = 0,015500 м•мм2/м);
μ и μCu - соответственно магнитная проницаемость материала стенок трубопровода и меди (μCu ≈ 4π•10-7Г/м).
Для прямолинейного участка газопровода без отводов, характерного для подводного участка газопровода, степень ослабления магнитной волны типа H01 в зависимости от расстояния между внутритрубным зондом и одним из излучателей иллюстрирует чертеж, где на фиг. 2 представлены значения коэффициента ослабления α для трубопроводов различного диаметра в предположении, что трубопровод изготовлен из стали с μ/μCu = 200 [см. вышеуказанный источник, стр. 22].
Как следует из фиг. 2, при экономически целесообразной линии с коэффициентом затухания более 100 дБ/км и при использовании волн длиной 6 - 8 (50 - 37,5 ГГц) [см. вышеуказанный источник, стр. 64] длина усилительного участка может составлять порядка 100 км. Следовательно, введение блоков 23 и 24 - усилителей магнитных волн необходимо, когда расстояние между стартовой 1 и финишной 2 позициями превышает 100 км.
Робототехнический комплекс для внутреннего контроля герметичности газопровода работает следующим образом.
Помещенный в стартовую позицию 1 внутритрубный зонд 5 начинает свое движение в трубопроводе 3 под действием разности давлений перекачиваемого газа до и после зонда. При этом скорость движения зонда может составлять 16-30 км/час. При проходе зондом 5 места расположения маркера дистанции 4 срабатывает ответчик прохода маркера дистанции 10 и на выходе последнего формируется сигнал, пропорциональный расстоянию, отделяющему маркер дистанции 4 от ответчика прохода маркера 10. Этот сигнал поступает на вход блока датчиков дистанции 11, и на выходе последнего формируется сигнал, содержащий информацию о дистанции, пройденной внутритрубным зондом 5.
Сигнал с выхода блока датчиков дистанции 11 в прототипе поступает в блок коммутации и аналого-цифрового преобразования 7 через второй вход последнего и через него в бортовое вычислительное и документирующее устройство 8. Одновременно через первый вход блока коммутации и аналого-цифрового преобразования 7 в бортовое вычислительное и документирующее устройство 8 поступает информация из блока датчиков течи 6. Таким образом, местоположение течи в трубе 3 документируется в соответствии с дистанцией, пройденной внутритрубным зондом 5 и вычисленной в блоке датчиков дистанции 11. Работа блоков 1-8 и 10, 11 контролируется схемой контроля 9.
Так работает прототип. В предложенном техническом решении выход блока датчиков дистанции 11 соединен с вторым входом коммутации и аналого-цифрового преобразования 7 через второй вход блока "ИЛИ" 22. Поэтому при наличии сигнала на выходе ответчика прохода маркера дистанции 10 схема предлагаемого технического решения работает аналогично схеме прототипа (на первом входе блока "И" 21 в этом случае сигнал отсутствует, поэтому и на первом входе блока "ИЛИ" 22 сигнал также отсутствует). Если же маркер дистанции 4 на трубе отсутствует или не функционирует, то предложенное техническое решение работает следующим образом.
На первом и втором входах блока синхронизации 12 формируются сигналы с задержкой времени относительно друг друга. Эти сигналы поступают соответственно на вход первого излучателя магнитных волн 13, установленного на стартовой позиции 1, и на вход передатчика 15. Излучение передатчика 15 принимается приемником 16, в результате чего на выходе приемника 16 формируется сигнал, который поступает на вход второго излучателя магнитных волн, установленного на финишной позиции 2.
Задержку времени в блоке синхронизации 12 в соответствии с соотношением (1) выбирают такой, чтобы первый 13 и второй 14 излучатели магнитных волн генерировали пакеты магнитных волн одновременно. Магнитные колебания типа H01 воспринимаются приемником магнитных волн 17, установленным на внутритрубном зонде 5, и на выходе приемника магнитных волн 17 формируется сигнал, который поступает на вход навигационного определителя 18. На выходе навигационного определителя 18 формируется сигнал, аналогичный сигналу, формируемому на выходе блока датчиков дистанции 11. Этот сигнал поступает на второй вход блока "И" 21. Так как в случае отсутствия сигнала на выходе ответчика прохода маркера дистанции 10 на первом входе блока "И" 21 сигнал присутствует, то сигнал с выхода навигационного определителя 18 через блок "И" 21 поступает на первый вход блока "ИЛИ" 22 и через него на второй вход блока коммутации и аналого-цифрового преобразователя 7.
В случае введения в схему робототехнического комплекса усилителей 23 и 24 излучения, генерируемые излучателями магнитных волн 13 и 14, усиливаются соответственно усилителями 23 и 24, и приемник магнитных волн 17 в радиусе действия этих усилителей воспринимает усиленные усилителями магнитные волны. Конструкция таких усилителей в настоящее время отработана [см. вышеуказанный источник, стр. 69]. В остальном схема работает аналогично прототипу.
Таким образом, на основе анализа структуры и функционирования предложенного технического решения, а также оценки его работоспособности применительно к условиям магистральных газопроводов можно заключить, что робототехнический комплекс для внутритрубного контроля магистральных газопроводов, в котором реализовано данное решение, обладает преимуществами, отвечающими поставленной цели - повышению точности определения координат внутритрубного зонда, а следовательно, и точности определения места течи в подводном газопроводе при использовании информации от данного робототехнического комплекса при локализации и ликвидации аварий на подводных газопроводах, связанных с повреждением или потерей маркеров дистанции на трубе.
Реализация предложения отвечает целям безопасности проведения аварийно-спасательных работ на море и в прибрежных районах, так как обеспечивает уменьшение времени поиска места аварии, а следовательно. и времени нахождения личного состава аварийно-спасательных судов в районе повышенной экологической опасности (особенно если по подводному трубопроводу перекачивался продукт с повышенным содержанием серы).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРИЛОЖЕНИЯ ДАВЛЕНИЯ К ПОСЛЕОЖОГОВЫМ РУБЦАМ | 1992 |
|
RU2082367C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2004 |
|
RU2289149C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| РАДИАЛЬНАЯ ОПОРА СКОЛЬЖЕНИЯ | 1995 |
|
RU2107847C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| Способ защиты кабельных трасс от дуговых коротких замыканий и загораний | 1985 |
|
SU1359852A1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| Бездуговое контактное отключающее устройство | 1980 |
|
SU951443A1 |
Изобретение относится к способам и средствам диагностики газопроводов в труднодоступных местах, например на обширных подводных участках, и направлено на решение вопросов повышения точности и надежности определения координат прибора для инспекции трубопровода, движущегося внутри трубы. В робототехническом комплексе для внутреннего контроля герметичности магистрального газопровода, включающем стартовую и финишную позиции, маркеры дистанции на трубе, мобильный внутритрубный зонд, содержащий последовательно соединенные блок датчиков течи, блок коммутации и аналого-цифрового преобразования, и бортовое вычислительное и документирующее устройство, а также схему контроля и последовательно соединенные ответчик прохода маркера и блок датчиков дистанции, введены блок синхронизации, два излучателя магнитных волн, передатчик, приемник, приемник магнитных волн, навигационный вычислитель и блок связи, выполненный в виде последовательно соединенных блоков НЕ, И и ИЛИ, причем блок синхронизации, первый излучатель магнитных волн и передатчик установлены на стартовой позиции, приемник и второй излучатель магнитных волн установлены на финишной позиции, приемник магнитных волн, навигационный вычислитель и блок связи установлены в мобильном внутритрубном зонде, при этом выход блока датчиков дистанции подсоединен к второму входу блока ИЛИ, выход которого соединен с вторым входом блока коммутации и аналого-цифрового преобразования, вход блока НЕ соединен с выходом ответчика прохода маркера, а выход приемника магнитных волн соединен с вторым входом блока И через навигационный вычислитель, вход первого излучателя магнитных волн соединен с первым выходом блока синхронизации, второй выход которого соединен с входом передатчика, выход приемника соединен с входом второго излучателя магнитных волн. Техническим результатом изобретения является повышение точности измерения координат зонда. 1 з.п. ф-лы, 2 ил.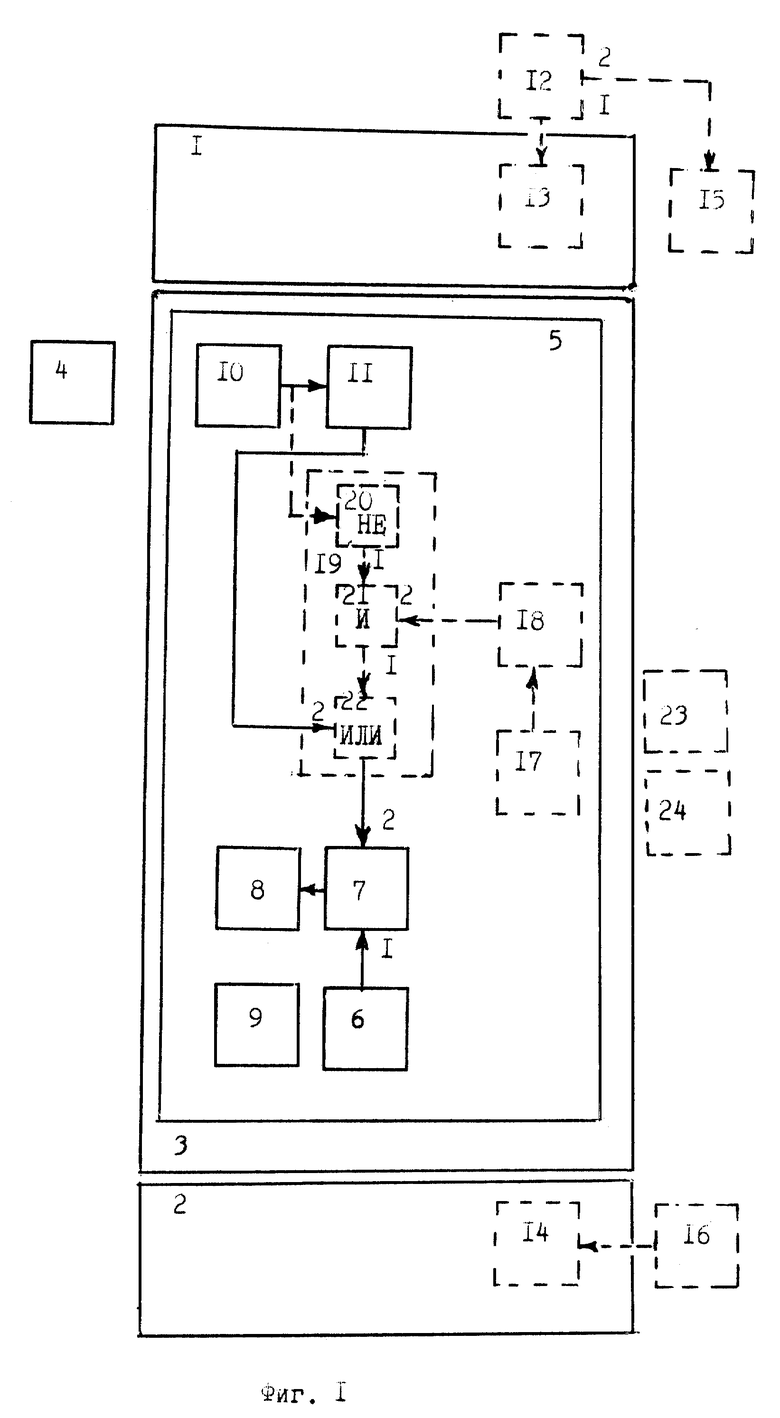
| Амфилохиев В.Б | |||
| и др | |||
| Всероссийская научно-техническая конференция "Научно-технические проблемы создания средств подъема и утилизации затонувших объектов", Тезисы докладов, СПб ГМТУ | |||
| - С.-П., 1994, с.46-47 | |||
| ПРИБОР ДЛЯ ИНСПЕКЦИИ ТРУБОПРОВОДА | 1994 |
|
RU2068148C1 |
| Устройство для обнаружения утечек вТРубОпРОВОдАХ | 1978 |
|
SU832246A1 |
| Устройство для контроля внутренней поверхности трубопровода | 1991 |
|
SU1800216A1 |
| Устройство для определения мест повреждения напорного трубопровода | 1988 |
|
SU1681140A1 |
| Устройство для определения места повреждения трубопровода | 1990 |
|
SU1707430A1 |
