Изобретение относится к технологии контроля и может быть использовано при построении и эксплуатации систем производства, поставки и реализации продукции.
Известен способ контроля, включающий периодическое измерение параметров в определенных заранее контрольных точках объекта и считывание соответствующих сигналов, сравнение с расчетными пороговыми значениями в указанных точках, а также вычисление обобщенных характеристик объекта с последующим сравнением с пороговыми значениями, (см., например, патент РФ N 2018900 с приоритетом от 05.06.90, МПК: G 05 D 23/00, Бюл. N 16 от 30.08.94)
Известный способ не обеспечивает возможности контроля объектов при их перемещении.
Наиболее близким аналогом-прототипом является способ контроля торговой точки, включающий установку меток, представляющих носители кодированных сигналов, на объектах на начальной позиции и периодическое считывание кодированных сигналов с носителей, причем кодированный сигнал для каждого носителя не совпадает с кодированными сигналами для других носителей (см., например, заявку Великобритании N 2210349 с приоритетом от 24.09.87, МПК: G 09 F 3/02).
Этот способ не позволяет обеспечить оперативный контроль движения отдельных объектов и потока объектов в целом.
Сущность изобретения состоит в том, что при способе контроля перемещаемых объектов, включающем установку меток, представляющих носители кодированных сигналов, причем кодированный сигнал для каждого носителя не совпадает с кодированными сигналами для других носителей, на объектах на начальной позиции и периодическое считывание кодированных сигналов с носителей, предварительно формируют последовательности сигналов двух типов, эти сигналы одновременно передают по двум направлениям, причем сигналы, передаваемые по первому направлению, запоминают в пункте контроля, а сигналы, передаваемые по второму направлению кодируют и затем переносят на носители, при этом на носители переносят кодированные сигналы первого типа, причем на каждый объект устанавливают один носитель, затем часть объектов группируют и придают группам объектов сопровождающие документы, на которых устанавливают носители с записанными кодированными сигналами второго типа, при этом каждой группе придают свой сопровождающий документ, а в совокупности запомненных сигналов сигналы первого типа, соответствующие объектам, входящим в определенную группу, относят к соответствующим сигналам второго типа, помещенным на документе, сопровождающем эту группу, и эти соотнесения соответствующих сигналов первого и второго типов также запоминают в пункте контроля, причем при каждом изменении местоположения каждой группы объектов на сопровождающем документе используют носитель с измененным записанным кодированным сигналом, после чего этот измененный кодированный сигнал соответственно передают в пункт контроля, где его декодируют и запоминают, а в случае изменения состава объектов группы передают в пункт контроля, декодируют и запоминают измененное соотнесение сигналов первого и второго типов, при этом кодированные сигналы о правомочно изымаемых из-под контроля объектов считывают с носителей, установленных на соответствующих объектах, и передают в пункт контроля, где эти сигналы декодируют, сравнивают с запомненными в пункте контроля сигналами и соответствующие сигналы затем исключают из запомненной совокупности сигналов, причем периодически считываемые кодированные сигналы с носителей на несгруппированных объектах и сопровождающих документах для групп объектов также передают в пункт контроля, где их декодируют, сравнивают с запомненными совокупностями сигналов и в случае определения расхождений между соответствующими сигналами делают выводы о нарушениях.
Кроме того, сигналы кодируют в виде машиночитаемых штрихкодов, а считывание сигналов с носителей проводят не реже одного раза в день.
Такой способ контроля обеспечивает возможность оперативного контроля перемещения и отдельных объектов и групп объектов.
На чертеже представлена функциональная блок-схема системы, позволяющей реализовать предложенный способ.
Система содержит формирователь 1 сигналов, предназначенный для задания последовательностей сигналов и выполненный в виде компьютера IBM PC (386 серии), содержащего блок задания и формирования сигналов, а также блок памяти (на чертеже не показаны).
Выход формирователя 1 сигналов подключен одновременно ко входу блока 2 кодирования и первому входу блока 3 памяти. Блок 2 кодирования выполнен в виде специализированного принтера (см., например, "Термо- и термотрансферные принтеры серий Xill", Дата Скан), а блок 3 памяти установлен, например, в пункте контроля (на чертеже не показан) и выполнен в виде оперативного запоминающего устройства на микросхеме MTSLC512R8D4.
Выход блока 2 кодирования соединен с первым входом блока 4 переноса сигналов на носители (на чертеже не показаны), выполненные, например, на основе этикеточной бумаги (ГОСТ 7625-86) и установленные на объектах 5 и документации к группам 6 объектов 5.
В данном примере реализации способа блок 4 переноса сигналов на носители выполнен в виде, например, этикеровочного устройства Т-100 фирмы "Гmbx @ КоКГ"/, в качестве объектов 5 выбраны объекты продукции винно-водочного производства, а именно бутылки водки, а под группами объектов соответственно имеют в виду партию, например, контейнер таких бутылок.
Второй вход блока 4 переноса сигналов подключен к первому выходу блока 7 управления, вторым выходом соединенного со входом формирователя 1, а третьим и четвертым выходами подключенного соответственно ко второму входу блока 3 памяти и к первому входу коммутатора 8, предназначенного для передачи в блок 3 памяти или блок 9 сравнения считываемых с объекта 5 и документации групп 6 сигналов, своими первым и вторым выходами соединенного с первым входом блока 9 сравнения, предназначенного для сопоставления запомненных и считываемых с объектов 5 и документации групп 6 сигналов, и третьим входом блока 3 памяти соответственно.
При этом блок 7 управления выполнен в виде соответствующего блока, приведенного в патенте РФ N 2117326.
Коммутатор 8 выполнен в виде демультиплексора МС 14555, а блок 9 сравнения - в виде компаратора МС 14585 по КМОП технологии (см., например, У.Титце и К. Шенк. Полупроводниковая схемотехника. М.: Мир,1982, с. 328-330).
Второй вход коммутатора 8 подключен к выходу блока 10 декодирования, входом связанного с выходом блока 11 считывания.
Блок 10 декодирования выполнен в виде дешифратора МС 14514 по КМОП технологии (см. , например, У. Титце и К. Шенк. Полупроводниковая схемотехника. М.: Мир, 1982, с. 319), а блок 11 считывания, предназначенный для считывания машиночитаемых штрихкодовых сигналов с носителей, установленных на объектах 5 и документации групп 6, выполнен
в виде сканера (см. , например, ScanPlus S Series, Intermec, 5/98, с. 2-3).
При этом вход блока 11 считывания связан с носителями, установленными на объектах 5 и документации групп 6 объектов 5.
Система, реализующая предложенный способ контроля перемещаемых объектов работает следующим образом.
С помощью формирователя 1 формируют сигналы первого и второго типов в виде, например, цифрованных сигналов, которые запоминают в блоке памяти (на черт. не показан) формирователя 1 в виде соответствующих последовательностей соответствующих сигналов.
Затем с помощью управляющего сигнала блока 7 управления из блока памяти формирователя 1 выводят каждый из сформированных сигналов и одновременно подают эти сигналы на соответствующие входы блока 2 кодирования и блока 3 памяти.
В блоке 2 кодирования сигналы преобразуют в машиночитаемый штриховой код, например в "Код 128" (см., например, ГОСТ Р51003- 96 "Автоматическая идентификация. Штриховое кодирование. Требования к символике "Код 128", 1996), дающего возможность кодирования с повышенной плотностью, а затем эти кодированные сигналы передают на блок 4 переноса на носитель, где соответственно на отдельном носителе помещают один из сформированных сигналов.
После этого на начальной позиции (на черт. не показана) соответствующие носители устанавливают на объектах 5, а также на документации, которой сопровождают группы 6 объектов 5.
Если, как уже указывалось, в качестве возможных объектов, перемещение которых контролируют в соответствии с данным способом, выбирают объекты винно-водочной продукции, то начальной позицией в таком случае может быть завод по розливу, например, водки.
Другими позициями (на черт. не показаны), на которые перемещают объекты 5 и группы 6 объектов, здесь могут служить, например, производственные базы, на которые поступают партии такой продукции.
Партии продукции (или группы в соответствии с терминами настоящей заявки) сопровождают соответствующей документацией, например товарно-транспортными накладными, на которых помещают носители с сигналами второго типа.
При этом при перемещении групп объектов с одной базы на другую установленные на документации носители с сигналами второго типа или меняют на другие, соответствующие по приведенным в сигналах данным измененному местоположению, или дополняют другими носителями, содержащими соответствующие сигналы.
Периодически, не реже 1 раза в сутки с помощью блока 11 считывают сигналы с установленных на объектах 5 и документации групп 6 носителей, последовательно передают с помощью, например, компьютерных сетей (на черт. не показаны) считанные сигналы на блок 10 декодирования, а затем через коммутатор 8 - на блок 9 сравнения, на который одновременно подают соответствующие сигналы, запомненные в блоке 3 памяти.
Синхронность подачи соответствующих сигналов и управление работой блока 3 памяти и коммутатора 8 обеспечивают с помощью блока 7 управления.
В случае расхождений по сигналу блока 9 сравнения определяют наличие нарушений при хранении объектов 5 и их групп 6.
При реализации объектов 5 и групп 6 этих объектов считывают сигналы соответствующих носителей и от блока 11 считывания через блок 10 декодирования, коммутатор 8 эти сигналы, как правомочно изымаемые, исключают из запомненных в блоке 3 памяти.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ПЕРСОНАЛИЗАЦИИ НОСИТЕЛЕЙ ИНФОРМАЦИИ, БЛОК ПЕЧАТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И ЛИНИЯ ПЕЧАТИ ДЛЯ ОСУЩЕСТВЛЕНИЯ БЛОКА ПЕЧАТИ | 2000 |
|
RU2162246C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ СОСТОЯНИЯ ОБЪЕКТОВ | 2011 |
|
RU2467392C1 |
| АССОЦИАТИВНОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2212715C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ НА МЕСТНОСТИ | 2006 |
|
RU2341819C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2414721C1 |
| УСТРОЙСТВО ВВОДА И ХРАНЕНИЯ КЛЮЧЕВОЙ ИНФОРМАЦИИ | 2000 |
|
RU2175775C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2150070C1 |
| КОДЕК ПОМЕХОУСТОЙЧИВОГО ЦИКЛИЧЕСКОГО КОДА | 2003 |
|
RU2251210C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДУЖНЫХ ГОЛОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 1999 |
|
RU2168197C2 |
Изобретение относится к технологии контроля и может быть использовано при создании и эксплуатации систем производства, поставки и реализации продукции. Технический результат изобретения заключается в оперативном контроле движения как отдельных объектов, так и потока объектов. Сущность изобретения состоит в том, что в способе контроля перемещаемых объектов, включающем установку меток, представляющих носители кодированных сигналов, на объектах на начальной позиции и периодическое считывание кодированных сигналов с носителей, предварительно формируют последовательности сигналов двух типов, эти сигналы запоминают в пункте контроля, а также кодируют и в виде штрихкодов переносят на носители, которые в виде меток устанавливают на объектах и сопровождающих документах, затем не реже одного раза в день считывают сигналы, сравнивают их с запомненными и в случае определения расхождений делают выводы о соответствующих нарушениях, причем сигналы, относящиеся к правомочно изымаемым из-под контроля объектам, исключают из запомненной совокупности сигналов. 2 з.п.ф-лы, 1 ил.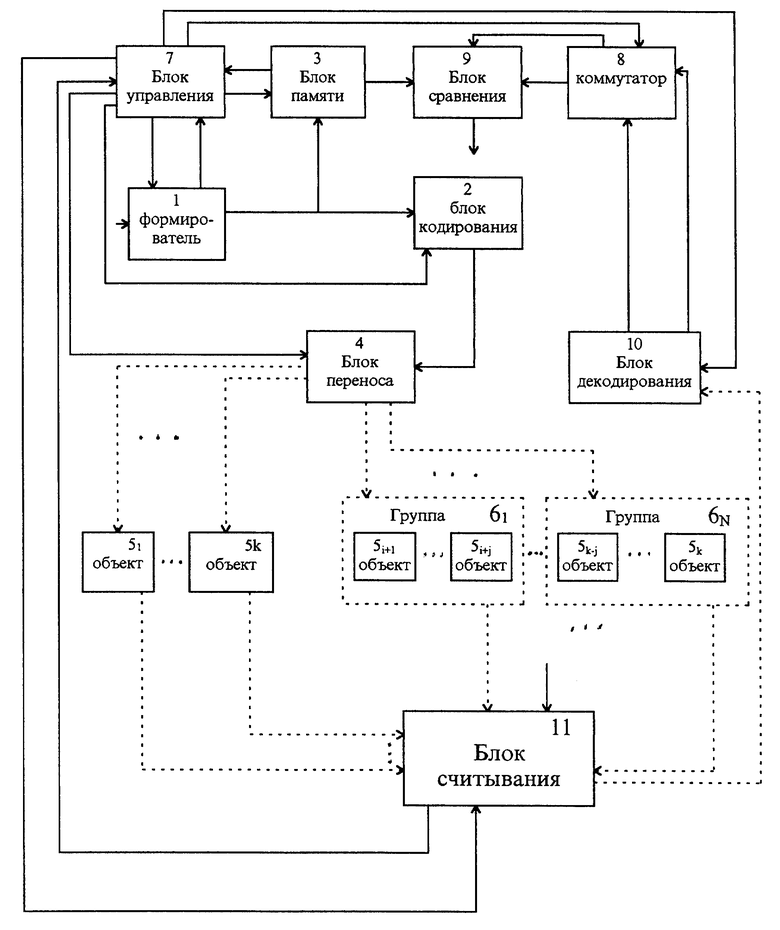
| ТРАНСФОРМИРУЕМОЕ КРЕСЛО ПРЕИМУЩЕСТВЕННО ИНДИВИДУАЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2210349C2 |
| МАРКИРУЮЩЕЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1996 |
|
RU2112284C1 |
| ПНЕВМАТИЧЕСКИЙ ВЫСЕВАЮЩИЙ АППАРАТ | 2005 |
|
RU2299544C1 |
| ПОДВЕРЖЕННЫЙ ВО ВРЕМЯ РАБОТЫ ВОЗДЕЙСТВИЮ ВЫСОКИХ ТЕПЛОВЫХ НАГРУЗОК ЭЛЕМЕНТ КОНСТРУКЦИИ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2002 |
|
RU2289035C2 |
| Устройство для транспортирования деталей | 1977 |
|
SU735519A1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1990 |
|
RU2018900C1 |
| SU 1736270 A1, 20.07.1996 | |||
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТА И РЕГИСТРАЦИИ ЕГО СОСТОЯНИЯ | 1996 |
|
RU2107943C1 |
