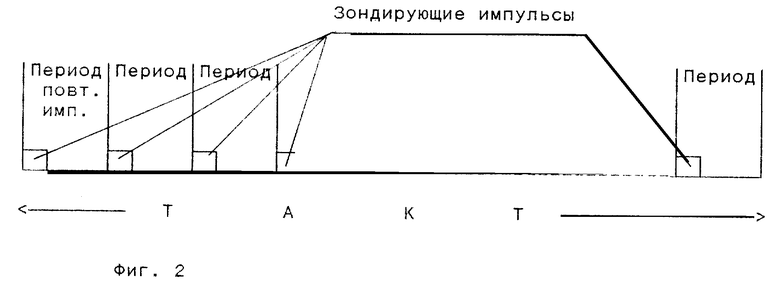
Изобретение относится к радиолокации и может быть использовано в импульсно-доплеровских радиолокационных станциях (ИД РЛС), в которых излучение производится последовательно повторяющимся дискретным набором, состоящим из N частот повторения. В результате обеспечивается прием периодической информации в виде серии отраженных от цели импульсов (пачки импульсов) с различными частотами повторения. РЛС работает в тактовом режиме. Количество тактов для разового измерения дальности равно числу используемых частот повторения импульсов. В пределах каждого такта частота повторения импульсов сохраняется постоянной. Длительность периодов повторения зондирующих (а, соответственно, и отраженных) импульсов задается синхронизатором. На фиг. 1 показана последовательность из N тактов с разными периодами повторения импульсов. На фиг. 2 показана последовательность периодов повторения импульсов в одном такте.
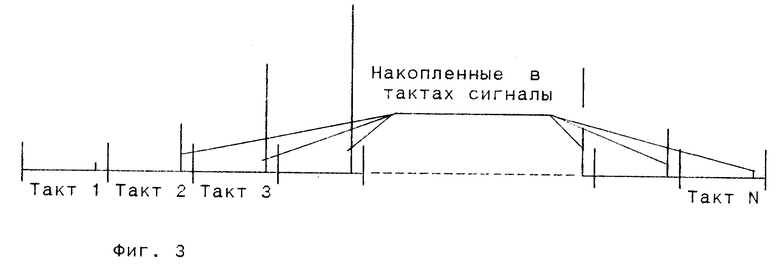
В приемнике производится накопление энергии отраженных импульсов за время такта (пока длительность периодов повторения постоянна). Накопленные в каждом такте сигналы составляют пачку из N импульсов, подлежащую обработке. На фиг. 3 показан вид такой пачки отраженных накопленных сигналов.
Время от посылки зондирующего сигнала до прихода отраженного характеризует дальность до цели, однако измерение однозначной дальности в ИД РЛС сопряжено с трудностями из-за малых значений периодов повторения по сравнению с временем задержки, определяемым измеряемой дальностью. Особенно существенно это при высокой частоте повторения (ВЧП) импульсов, когда периоды повторения существенно меньше, чем при средней и низкой частотах повторения импульсов. Для раскрытия неоднозначности применяются специальные методы измерения, использующие модуляцию излучаемого сигнала по частоте.
Отраженные сигналы сохраняют эту модуляцию. Большинство таких видов модуляции, однако, ухудшает свойства импульсно - доплеровских РЛС при обнаружении целей на фоне мешающих отражений.
Для устранения неоднозначности в режиме средней частоты повторения (СЧП) применяется несколько частот повторения с последующей совместной обработкой получаемых данных. В режиме высокой частоты повторения (ВЧП) такой подход не применяется из-за низкой точности измерения временных задержек при малых периодах повторения импульсов.
Распространение в обзорных ИД РЛС получили устройства, в которых измерение дальности до цели в режиме высокой частоты повторения (ВЧП) осуществляется методом ЛЧМ - линейной частотной модуляции. В таких РЛС частота несущей, модулированной видеоимпульсами с высокой частотой повторения, меняется по заданному линейному закону.
В результате сдвиг частоты отраженного радиосигнала от частоты излучаемого сигнала оказывается линейно зависимым от дальности до цели, что позволяет по значению измеренного сдвига частоты определить дальность до цели (см. Дудник П. И., Чересов Ю.И. Авиационные радиолокационные устройства. - Изд. ВВИА им. Н.Е. Жуковского, 1986, с. 237 - 238).
В известном дальномере, принятом за прототип предлагаемого изобретения (см. Дудник П. И., Чересов Ю.И. Авиационные радиолокационные устройства. - Изд. ВВИА им. проф. Н.Е.Жуковского, 1986, стр. 244-245) производится перестройка высокой частоты излучаемых радиоимпульсов в каждом такте. В течение первого такта частота заполнения излучаемых импульсов не меняется в течение всего такта, на втором такте частота заполнения излучаемых импульсов изменяется по линейному закону с крутизной S. Управление тактами и их переключение производятся синхронизатором, а само изменение высокочастотного сигнала, заполняющего излучаемые радиоимпульсы, обеспечивается с помощью специальных схем в передатчике, точность работы которых обусловлена условиями применения (климатические условия, элементная база и пр.).
К недостаткам таких дальномеров относятся:
1. Необходимость специальных аппаратурных решений, обеспечивающих заданное изменение высокой частоты излучаемого сигнала, что усложняет конструкцию дальномера, уменьшает его надежность и точность.
2. Ухудшение качества когерентного накопления на фоне земли и расширение спектра мощного сигнала, отраженного от земли, определяющего величину мертвой зоны по доплеровской частоте, что уменьшает точность измерения дальности.
3. Жесткие требования к линейности и точности изменения высокой частоты излучаемого сигнала, поскольку именно точность и линейность во времени изменения частоты определяют точность измерения дальности.
4. Ухудшение конструктивных характеристик передатчика: увеличение веса и габаритов, что увеличивает вес и габариты дальномера в целом.
Задачей предлагаемого изобретения является создание дальномера для ИД РЛС с ВЧП импульсов без ЛЧМ несущей, лишенного перечисленных недостатков. Решение поставленной задачи достигается тем, что производят дискретное изменение частоты повторения импульсов в течение пачки отраженных от цели сигналов, а также заранее характеризуют состояние сигналов в стробируемых по величине временной задержки сигнала каналах приемника при фиксированных значениях дальности для каждого из применяемых дискретных наборов частоты повторения, составляя эталонную матрицу, имеющую два столбца: первый - отображает состояние сигналов во всех стробируемых каналах приемника кодовыми словами, служащими адресами для постоянного запоминающего устройства (ПЗУ), реализующего кодовую матрицу, второй - номера интервалов дальности, находящихся в памяти этого ПЗУ, что позволяет определить значение однозначной дальности путем выбора из ПЗУ значений номеров интервалов дальности. Число строк матрицы обусловлено количеством интервалов, на которое разделен весь диапазон однозначной дальности. В предлагаемом дальномере разовое измерение дальности до цели производится на интервале из нескольких (N) тактов, на каждом из которых устанавливается определенная частота повторения модулирующих видеоимпульсов. При каждой частоте повторения зона приема на периоде повторения делится на К стробируемых каналов и в зависимости от наличия или отсутствия в каждом из этих К каналов сигнала, превышающего заданный пороговый сигнал, формируется код, значение которого определяет номер стробируемого канала, в котором был принят сигнал на данной частоте повторения. Совокупность таких кодов для всех N частот повторения одной пачки, отраженной от цели, представляет "кодовое слово". Значение кода на данной частоте повторения представляет собой величину неоднозначной дальности, выраженную в квантованной форме, где величиной кванта является длительность строба, а количество разрядов определяется числом стробируемых каналов приемника внутри периода. При попадании сигнала в "мертвую зону" (при совпадении отраженного импульса с интервалом работы передатчика) коду присваивается одно из заданных кодовых значений. Форма кодирования может быть произвольной, в частности код может быть троичным числом, значения которого соответствуют порядковому положению стробируемого канала в приемнике, в котором обнаружен сигнал цели. Кодовое слово и кодовая матрица также могут быть составлены различными способами и, в частности, кодовое слово может служить адресом для отыскания элемента матрицы, в котором записано значение дальности до цели, соответствующее данному кодовому слову.
Для компенсации движения цели за время измерения дальности может быть использовано преобразование элементов кодового слова с учетом изменения дальности цели от начального такта измерения к текущему такту.
Каждому таким образом сформированному кодовому слову соответствует значение дальности, а соответствие между кодовым словом и дальностью до цели устанавливается специальной заранее определенной эталонной кодовой матрицей.
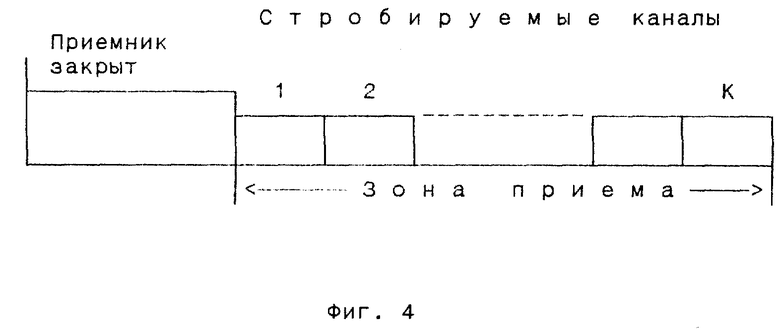
На фиг. 4 показано расположение стробируемых каналов приемника на периоде повторения.
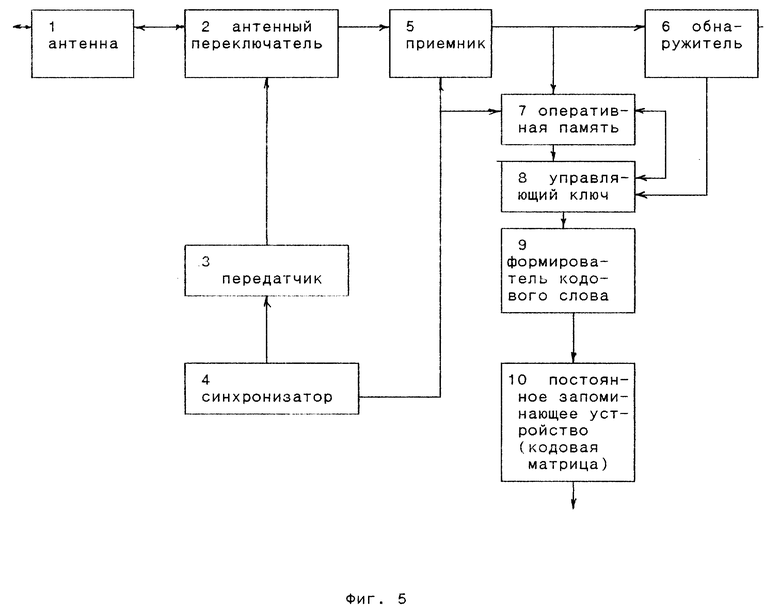
На фиг. 5 представлена блок-схема кодового дальномера импульсно-доплеровской радиолокационной станции.
Кодовый дальномер содержит антенну 1, антенный переключатель 2, передатчик 3, синхронизатор 4, приемник 5, обнаружитель 6, оперативную память 7, управляющий ключ 8, формирователь кодового слова 9, постоянное запоминающее устройство (ПЗУ) 10, реализующее эталонную кодовую матрицу. Кодовый дальномер работает следующим образом. Антенна 1 излучает в пространство последовательность импульсов с высокой частотой повторения. Частота повторения импульсов фиксирована в пределах одного такта. На каждом следующем такте частота повторения импульсов меняется, но остается фиксированной в пределах такта. Таких тактов несколько (N). В описываемом прошедшем испытания образце - 7 тактов. Последовательность тактов и их длительность устанавливаются заранее и фиксируются синхронизатором. Сигналы на антенну 1 для излучения в пространство поступают через антенный переключатель 2 с передатчика 3, управляемого синхронизатором 4. Последовательность отраженных импульсов поступает через антенну 1 и антенный переключатель 2 на приемник 5.
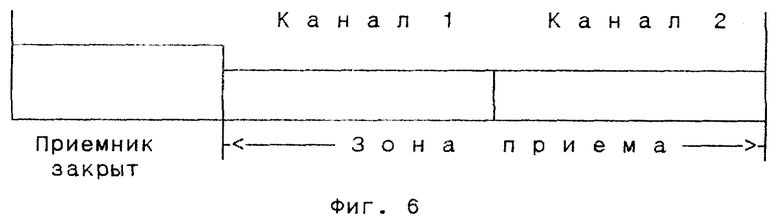
Во время излучения импульса в пространство антенна работает на передачу, и приемник закрыт. Время приема делится на К частей стробируемых по времени задержки каналов. Расположение стробируемых каналов в пределах периода повторения определяется синхронизатором. В описываемом дальномере стробируемых каналов два, последовательно расположенных во времени, каждый из которых занимает половину зоны приема.
На фиг. 6 показано расположение стробируемых каналов на периоде повторения для двухканального варианта. Сигналы каждого из К стробируемых каналов за последние N тактов Cji (i=1-N; j=1-K) поступают на обнаружитель 6 и записываются в оперативную память 7 (обычно в цифровой форме). В память сигналы поступают потактно. В каждом такте число сигналов равно числу стробируемых каналов. Общее число ячеек оперативной памяти S = К*N.
Память может быть реализована на стандартных микросхемах ЗУ (см. Калабеков Б.А. Микропроцессоры и их применение в системах передачи и обработки сигналов. - М.: Радио и связь, 1988, с. 63, рис. 2.1).
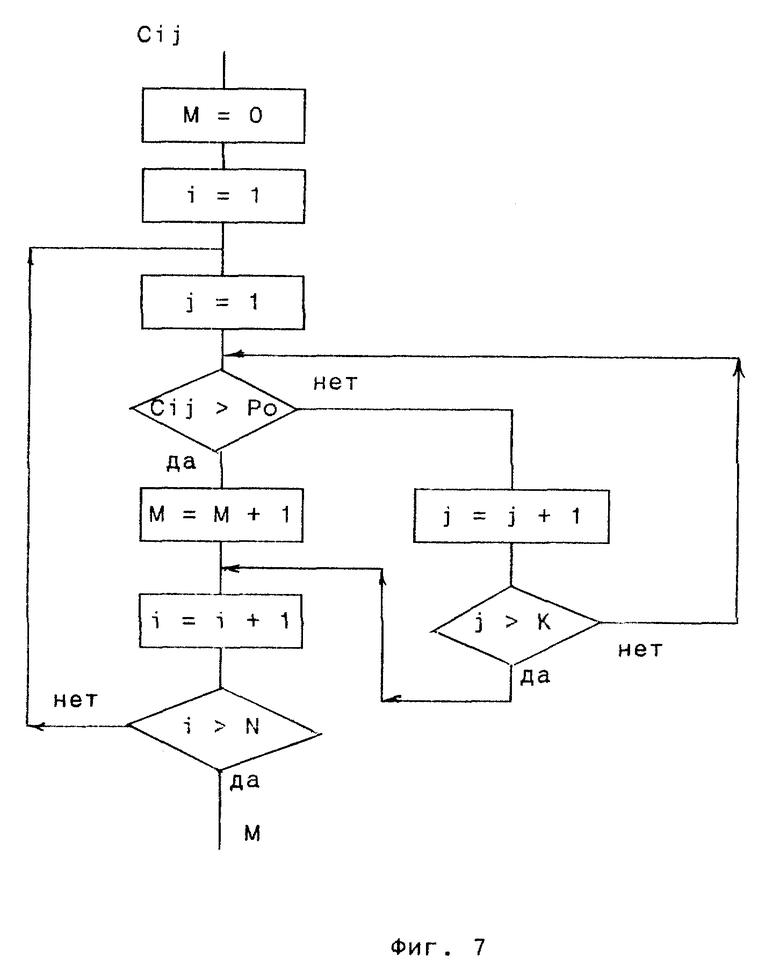
Обнаружитель включает в себя устройство сравнения с порогом и счетчик, который считает сколько раз из N тактов имело место превышение порога обнаружения хотя бы в одном из стробируемых каналов. Если критерий обнаружения "М из N" выполняется (в описываемом дальномере принят критерий "2 из 7"), то обнаружитель разрешает использование хранящейся в оперативной памяти информации, накопленной за N тактов. Блок-схема обнаружителя приведена на фиг. 7.
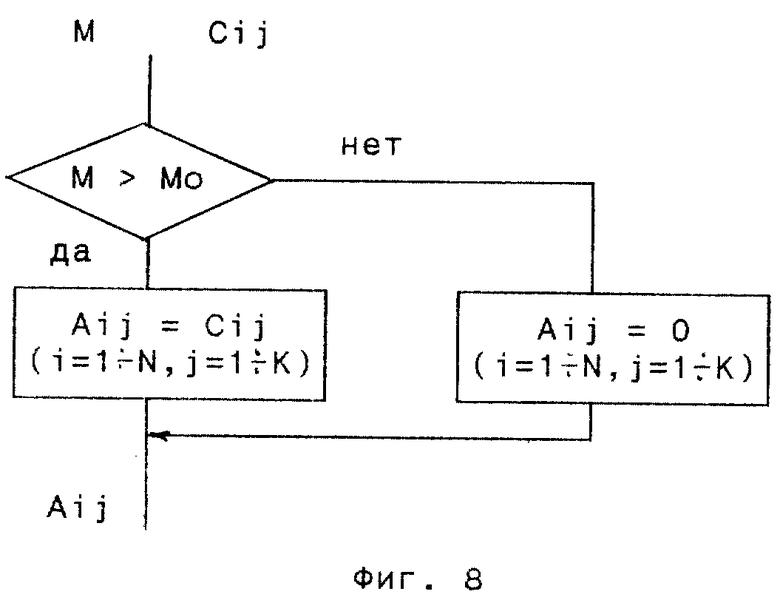
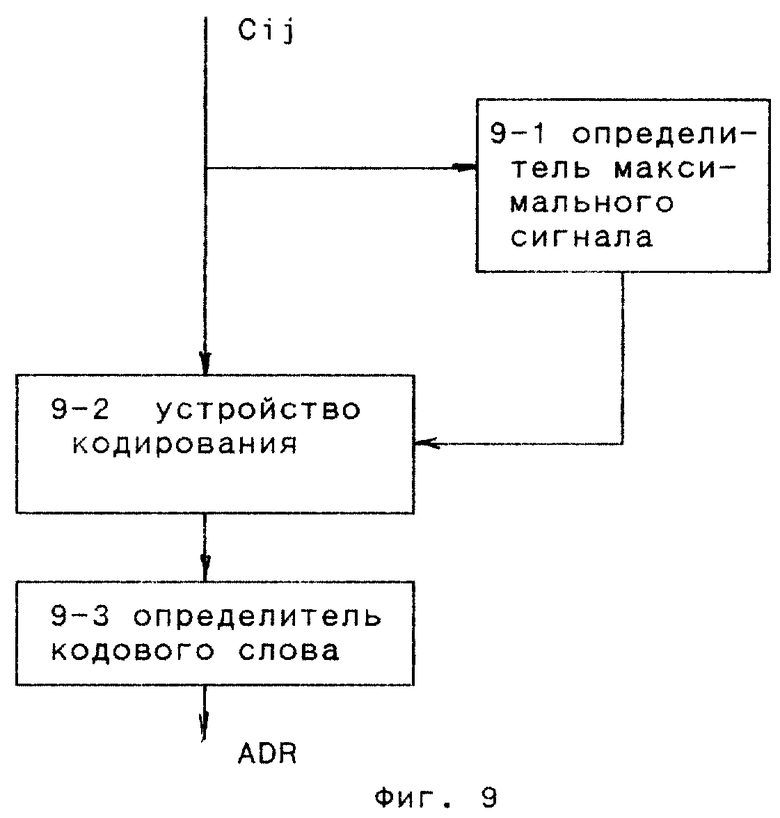
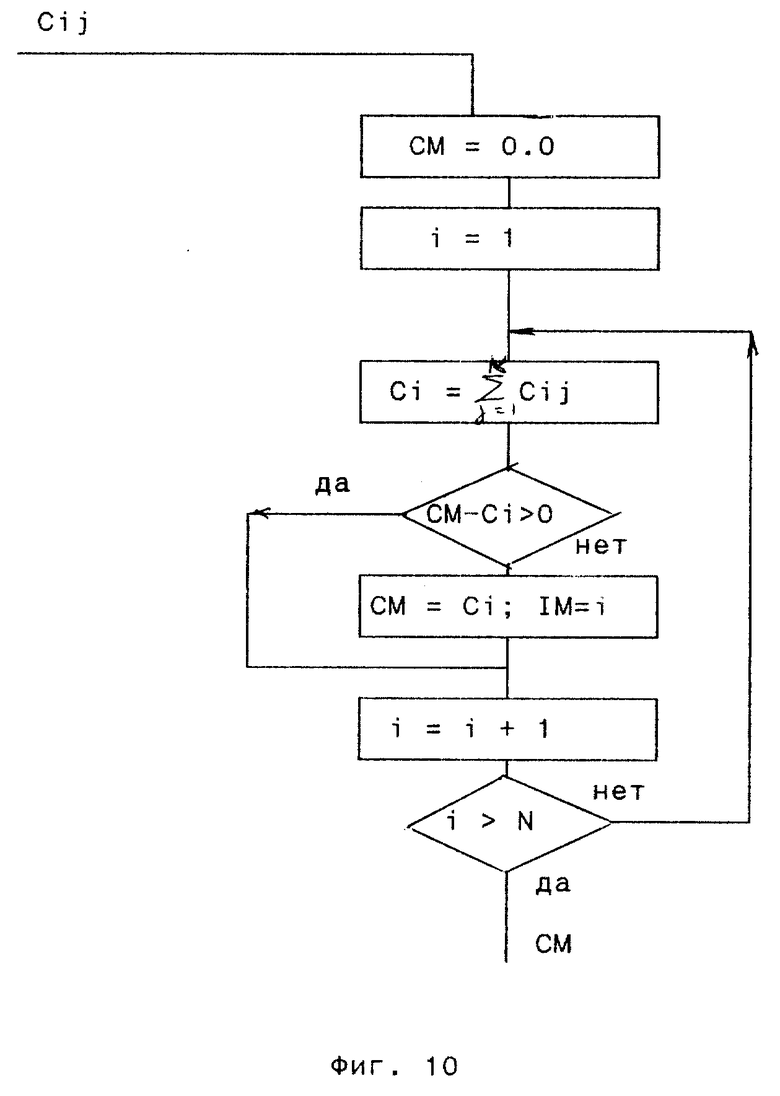
Амплитуды сигналов Cij, отраженных от такой обнаруженной цели во всех стробируемых каналах (j = 1-К) за все N тактов (i = 1-N), поступают через управляющий ключ 8 на формирователь кодового слова 9. Реализованный в ЦВМ управляющий ключ 8 имеет алгоритм, разрешающий или запрещающий поступление информации из оперативной памяти на формирователь кодового слова 9. Схема алгоритма управляющего ключа приведена на фиг. 8. Управляющий ключ состоит из ячеек, в которых выходным значениям присваиваются или входные значения или нулевые. Если критерий обнаружения не выполнен, то управляющий ключ 8 закрыт, и сигналы из оперативной памяти 7 не попадают на формирователь кодового слова 9. На фиг. 9 приведена блок-схема формирователя кодового слова. Формирователь кодового слова включает в себя определитель максимального сигнала 9-1, устройство кодирования 9-2 и определитель кодового слова 9-3. В определителе максимального сигнала 9-1 из сумм амплитуд сигналов всех стробируемых каналов  по всем тактам выбирается максимальное значение сигнала СМ = Мах{Ci} и фиксируется номер частоты повторения IM, при котором этот максимум имел место. На фиг. 10 приведена схема алгоритма определителя максимального сигнала, реализованная в ЦВМ. Определенный таким образом максимальный сигнал поступает для нормирования на устройство кодирования 9-2, где с учетом выбранного максимума в каждом такте определяются номера стробируемых каналов, в которых находится сигнал или его большая часть. Каждому стробируемому каналу соответствует свой код. Ниже дано описание устройства кодирования 9-2 для варианта с двумя стробируемыми каналами (К = 2) и числа тактов N = 7.
по всем тактам выбирается максимальное значение сигнала СМ = Мах{Ci} и фиксируется номер частоты повторения IM, при котором этот максимум имел место. На фиг. 10 приведена схема алгоритма определителя максимального сигнала, реализованная в ЦВМ. Определенный таким образом максимальный сигнал поступает для нормирования на устройство кодирования 9-2, где с учетом выбранного максимума в каждом такте определяются номера стробируемых каналов, в которых находится сигнал или его большая часть. Каждому стробируемому каналу соответствует свой код. Ниже дано описание устройства кодирования 9-2 для варианта с двумя стробируемыми каналами (К = 2) и числа тактов N = 7.
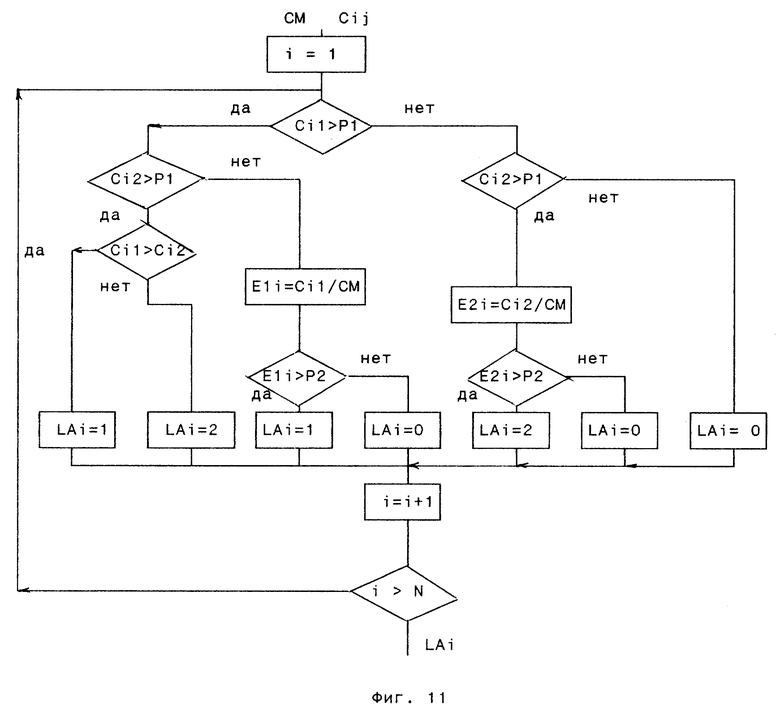
На устройство кодирования 9-2 из памяти поступают Cij - массив значений амплитуд сигналов в первом и втором стробах для семи тактов и с выхода определителя максимального сигнала СМ - значение максимального сигнала. Устройство кодирования реализовано на ЦВМ. Схема алгоритма кодирования представлена на фиг. 11 на примере варианта с двумя стробируемыми каналами К = 2 при числе тактов N = 7. Из схемы видно, что в цикле по i=l-7 производится последовательное сравнение с установленным порогом P1 сигналов с выхода первого канала Ci1 и сигналов с выхода второго канала Ci2. Если оба сигнала на данном такте превышают заданный порог P1, то это означает, что сигнал присутствует в обоих каналах и производится сравнение сигналов Ci1 и Ci2 между собой, если сигнал в первом канале Ci1 больше, чем сигнал во втором канале Ci2, то сигналу на данном такте присваивается код LAi = 1, если же сигнал во втором канале Ci2 больше сигнала в первом канале Ci1, то присваивается код LAi = 2. Если сигнал присутствует лишь в одном из каналов, и при этом его доля от максимального сигнала СМ превышает заданный порог P2, то присваивается код этого канала LAi = 1 при Cil > P1, Ci2 < P1 и Eli > P2, LAi = 2 при Cil < P1, Ci2 > P1 и E2i > P2. Если ни одно из последних условий не выполняется, то считается, что сигнал отсутствует в обоих каналах.
LAi=0 при Cil > P1, Ci2 < P1 и Eli < P2 или
Ci1 < P1, Ci2 > P1, и E2i < P2 или
Ci1 < P1 и Ci2 < P1.
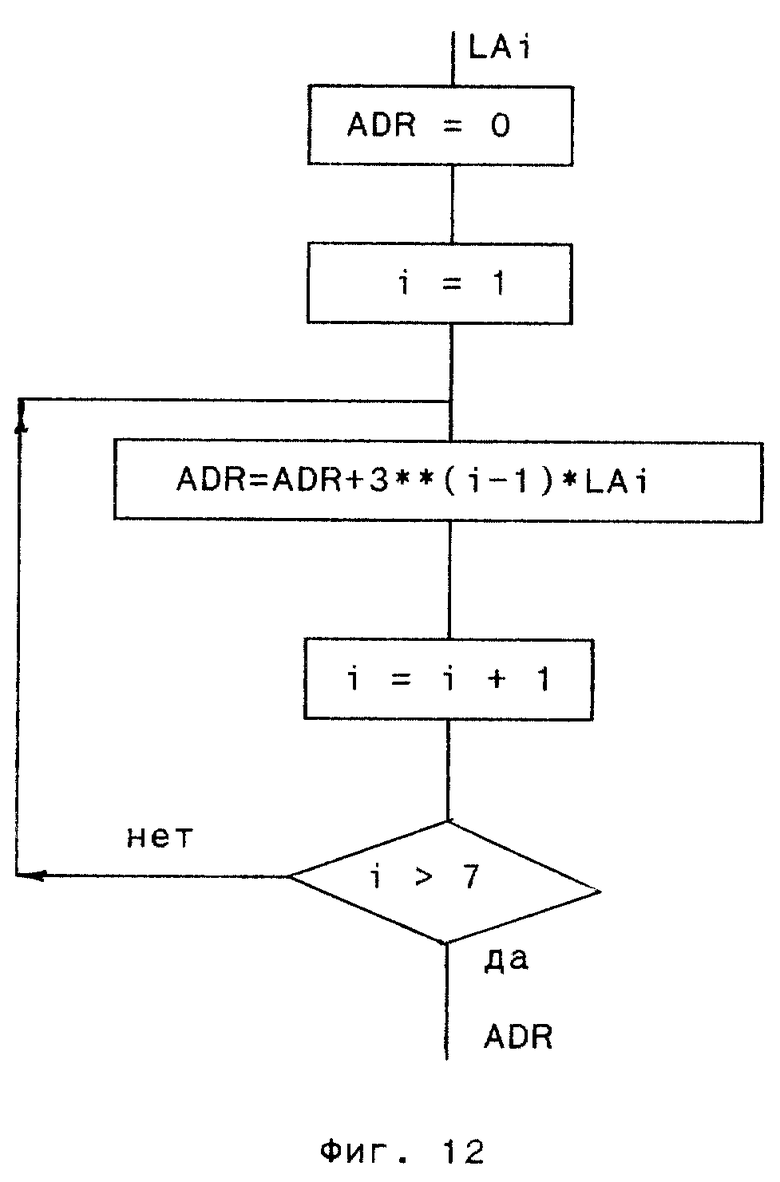
Совокупность кодов для всех тактов с устройства кодирования 9-2 поступает на определитель кодового слова 9-3, где формируется единое кодовое слово, соответствующее всей совокупности тактов. На фиг. 12 приведена схема алгоритма работы определителя кодового слова. В определителе кодового слова 9-3 из массива кодов LAi, поступающего из устройства кодирования 9-2, формируется кодовое слово в соответствии с алгоритмом
ADR = ADR + 3**(i-l)*LAi
Сформированное таким образом кодовое слово поступает на постоянное запоминающее устройство (эталонную кодовую матрицу) 10, определяя в нем однозначную дальность. Эталонная кодовая матрица реализуется в виде постоянного запоминающего устройства (ПЗУ) в ЦВМ. В это ПЗУ информация в ячейки записывается однократно заранее, а в процессе эксплуатации используется лишь режим чтения. Указанное ПЗУ может быть реализовано на стандартных микросхемах (см. Калабеков Б. А. Микропроцессоры и их применение в системах передачи и обработки сигналов. - М.: Радио и связь, 1988, с. 68, рис. 2.6). Описанная система позволяет измерить дальность при высокой частоте повторения импульсов (ВЧП) во время обзора пространства лучом антенны в пределах одной пачки импульсов (при разовом проходе луча антенны по цели). При таком измерении отпадает необходимость в частотной модуляции несущей излучаемого сигнала, а значения дальности определяются за одно обращение к описанной выше эталонной кодовой матрице.
Макетный образец предлагаемого изобретения прошел летные испытания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| МОДАЛЬНЫЙ ДАЛЬНОМЕР ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2004 |
|
RU2277714C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА | 1997 |
|
RU2117958C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| ИЗМЕРИТЕЛЬ АЗИМУТА ВЫБОРКОЙ АМПЛИТУД | 1997 |
|
RU2117963C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
Изобретение относится к радиолокации и может быть использовано в импульсно-доплеровских радиолокационных станциях (ИД РЛС), в которых излучение производится последовательно повторяющимся дискретным набором, состоящим из N частот повторения. В результате обеспечивается прием периодической информации в виде серии отраженных от цели импульсов (пачки импульсов) при различных частотах повторения. Дальномер содержит антенну, антенный переключатель, передатчик, синхронизатор, приемник, обнаружитель, оперативную память, управляющий ключ, формирователь кодового слова, постоянное запоминающее устройство, реализующее эталонную кодовую матрицу. Технический результат заключается в возможности измерения дальности до цели при обзоре пространства без применения для этого линейной частотной модуляции (ЛЧМ) несущей излучаемого сигнала. 12 ил.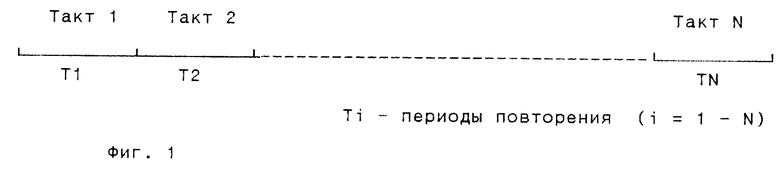
Кодовый дальномер, содержащий антенну, соединенную через антенный переключатель с передатчиком и приемником, управляемыми соединенным с ними синхронизатором, обеспечивающим разделение времени приема на К стробируемых каналов, отличающийся тем, что выход приемника соединен со входом обнаружителя и со входом оперативной памяти, выход оперативной памяти соединен с первым входом управляющего ключа, ко второму входу управляющего ключа присоединен выход обнаружителя, выход управляющего ключа присоединен ко входу формирователя кодового слова, а выход формирователя кодового слова присоединен ко входу постоянного запоминающего устройства (ПЗУ), в котором заранее записаны значения дальности до цели, соответствующие всем возможным значениям кодовых слов, а выход ПЗУ является выходом дальномера.
| ДУДНИК П.И., ЧЕРЕСОВ Ю.И | |||
| Авиационные радиолокационные устройства | |||
| - Издание ВВИА им.проф.Н.Е.Жуковского, 1986, с.244 - 245 | |||
| Автоматический измеритель времени задержки | 1972 |
|
SU471567A1 |
| US 5148175 A, 15.09.1992 | |||
| US 4587523 A, 06.05.1986 | |||
| Композиция для покрытия бетонных поверхностей | 1972 |
|
SU481582A1 |
| БИОЛОГИЧЕСКИ РАЗРУШАЕМАЯ ТЕРМОПЛАСТИЧНАЯ КОМПОЗИЦИЯ С ИСПОЛЬЗОВАНИЕМ РЖАНОЙ МУКИ | 2006 |
|
RU2318006C1 |

