В целом, изобретение относится к устройству контроля (мониторинга) положения каната для определения положения каната, направляемого в роликах блока роликов по меньшей мере одним первым канатном роликом, контроль которого должен проводиться в блоке роликов транспортной системы с канатным приводом, содержащем по меньшей мере один первый и по меньшей мере один второй канатный ролик, представляющий собой реперный ролик.
Кроме того, изобретение относится к транспортной системе с канатным приводом, включающей канат, приводное устройство для приведения в движение каната, и по меньшей мере один блок роликов для направления движения каната, в которой по меньшей мере один блок роликов содержит по меньшей мере один первый канатный ролик и по меньшей мере один второй канатный ролик, представляющий собой реперный ролик, в которой, кроме того, используется устройство контроля положения каната для контроля по меньшей мере положения каната, направляемого по меньшей мере одним первым канатным роликом.
Кроме того, изобретение относится к способу контроля (мониторинга) положения каната, который направляется роликами блока роликов с по меньшей мере одним первым канатным роликом, контроль которого должен проводиться в блоке роликов транспортной системы с канатным приводом, содержащей по меньшей мере один первый и по меньшей мере один второй канатный ролик, представляющий собой реперный ролик.
В транспортной системе с канатным приводом, в подвесной канатной дороге в форме кресельного подъемника или подъемника с вагоном-гондолой, несущие, тяговые и/или подъемные канаты (тросы) транспортной системы проходят по канатным роликам (шкивам). Как правило, канатные ролики закреплены на местности на опорах, при этом несколько канатных роликов вместе образуют блок роликов.
Канатные ролики транспортной системы используются либо в качестве опорных роликов, на которые опирается канат, либо в качестве прижимных роликов, которые прижимают канат, то есть канат движется под направляющими его канатными роликами. Ни в одном из этих случаев, однако, двигающийся канат не находится в направляющих его роликах по всей своей протяженности. Как следствие, при некоторых условиях канат может выскакивать из канатных роликов под действием поперечных сил, возникающих, например, от ветра или тряски. В этом случае канат перемещается параллельно оси вращения канатного ролика и может вскочить из направляющего паза в канатном ролике.
Для обеспечения безопасности транспортной системы, на опорах канатных роликов обычно устанавливаются так называемые ловители каната, которые захватывают канат, сошедший с одного или более роликов. Работа транспортной системы обычно останавливается благодаря разъединению концевого выключателя сместившимся канатом. Таким образом, в данной конфигурации могут различаться только два положения каната. Канат либо направляется канатным роликом или канатными роликами, либо уже сошел с них. При этом невозможно определить наличие угрозы схода каната со ролика.
Схема контроля, определяющая исправное состояние и/или наличие неисправности, в частности контроля положения каната в подвесной канатной дороге или кресельном подъемнике, раскрыта в DE 19752362 А1. В этом документе предлагается определять положение каната с использованием индукционных или емкостных бесконтактных переключателей. При этом, однако, необходимо устанавливать бесконтактные переключатели с очень высокой точностью для получения достоверной информации о состоянии системы. Кроме того, использование бесконтактных переключателей неудобно тем, что по мере износа канатных роликов в процессе эксплуатации транспортной системы необходимо менять положение бесконтактных переключателей.
Таким образом, цель настоящего изобретения состоит в усовершенствовании устройства контроля положения каната, транспортной системы с канатным приводом и способа контроля положения каната в транспортной системе с канатным приводом, примеры которой приведены выше, так, чтобы упростить определение угрозы схода каната с по меньшей мере одного канатного ролика транспортной системы.
Согласно изобретению, эта цель достигается в устройстве контроля положения каната описанного выше типа за счет использования датчика величины параметра движения для определения первой величины параметра движения по меньшей мере одного первого канатного ролика и второй величины параметра движения реперного (эталонного) ролика, вычислительного устройства для сравнения первой и второй величин параметров движения и определения взаимного расхождения величин параметров движения между первой и второй величинами параметров движения, которое соответствует статусу безопасности функционирования транспортной системы.
Посредством подобного устройства контроля положения каната можно просто и достоверно установить наличие и степень смещения каната транспортной системы от исходного положения, которое определяется относительно по меньшей мере одного первого канатного ролика. В предпочтительном варианте осуществления входной или выходной ролик блока роликов выбирается в качестве первого ролика, а канатный ролик, расположенный между двумя соседними канатными роликами, выбирается в качестве реперного ролика. Поперечная сила, воздействующая на канат на по меньшей мере одном первом ролике, обычно приводит к большему отклонению каната от исходного положения, чем на реперном ролике.
В обычном канатном ролике, вследствие отклонения каната от исходного положения, канат касается по меньшей мере одного первого ролика не в самой глубокой точке направляющего паза, а, скорее, его восходящей боковой поверхности. Если при этом канат проходит с постоянной скоростью через по меньшей мере один первый ролик и реперный ролик, то из-за отклонения каната эффективные радиусы по меньшей мере одного первого ролика и реперного ролика отличаются друг от друга. Это приводит к тому, что у по меньшей мере одного первого ролика, эффективный радиус которого обычно больше и относительно которого канат отклоняется из своего исходного положения больше, чем относительно реперного ролика, угловая скорость вращения меньше, чем угловая скорость реперного ролика. Скорость вращения представляет собой первый параметр движения по меньшей мере одного первого канатного ролика и может быть сопоставлена со скоростью вращения реперного ролика, представляющей собой второй параметр движения. Таким образом, взаимное расхождение величин параметров движения между первой величиной параметра движения, определяемой датчиком величины параметра движения, и второй величиной параметра движения, может быть просто определено вычислительным устройством. Чем больше взаимное расхождение первой и второй величин параметров движения, тем больше опасность схода каната. Таким образом, величина расхождения величин параметров движения непосредственно связана с статусом безопасности функционирования транспортной системы. Чем больше расхождение величин параметров движения, тем больше неопределенность статуса безопасности функционирования транспортной системы. В результате, благодаря предложенному в изобретении устройству контроля положения каната контроль положения каната транспортной системы может проводиться на одном или более канатных роликов просто определением величин параметров движения двух канатных роликов. Более того, изменения положения каната могут быть обнаружены простым и надежным способом, благодаря чему меры в связи с угрозой схода каната могут быть предприняты еще до того, как это произойдет. В настоящем изобретении отсутствует необходимость в сложной настройке датчика параметра движения, как в случае со схемой, описанной в DE 19752362 А1. Действительно, здесь не происходит непосредственного определения положения каната. Вместо этого изменение положения каната определяется косвенно, по влиянию изменения положения каната на соответствующие величины параметров движения канатных роликов, контроль которых ведется. Кроме того, предлагаемое устройство контроля положения каната совершенно не зависит от типа и формы каната. Конструкция каната, которая может влиять на результаты измерения в случае прямого контроля, например, бесконтактными датчиками, в настоящем изобретении значения не имеет. Далее, предложенное в настоящем изобретении устройство контроля положения каната также подходит и для определения износа роликов, контроль которых ведется. По мере увеличения продолжительности эксплуатации системы происходит износ канатных роликов, что при постоянной скорости движения каната ведет к изменению величин параметров движения на канатных роликах, контроль которых ведется. При этом может быть определен износ внутри блока роликов или даже может быть проведено сравнение износа между разными блоками роликов. Благодаря этому обслуживание и замена канатных роликов транспортной системы требуется только тогда, когда степень износа канатного ролика, контроль которого ведется, превышает определенный заданный предел. Более того, преимуществом предложенного в настоящем изобретении устройства является то, что неравномерность движения каната не имеет значения для процесса определения статуса безопасности транспортной системы. Например, провисание каната между двумя блоками роликов может зависеть от нагрузки. В частности, компоненты скорости, обусловленные флуктуациями нагрузки и меняющимися ускорениями каната, компенсируются при определении расхождения величин параметров движения.
Целесообразно использовать устройство определения статуса безопасности функционирования для определения статуса безопасности функционирования транспортной системы в зависимости от по меньшей мере одного конкретного расхождения величин параметров движения. Устройство определения статуса безопасности функционирования позволяет определить статус безопасности функционирования транспортной системы в зависимости от определенного или конкретного расхождения величин параметров движения. Таким образом, имеется возможность по конкретному расхождению величин параметров движения определить статус безопасности функционирования транспортной системы, например, "готов к эксплуатации", либо "опасность схода каната", либо "опасность схода каната в блоке роликов №…".
Датчик положения каната с успехом может применяться для определения положения каната в по меньшей мере одном первом канатном ролике. Например, статус безопасности функционирования транспортной системы также может быть установлен определением положения каната в по меньшей мере одном первом ролике. Более того, также можно определить положение каната в по меньшей мере одном первом канатном ролике или в его направляющем пазу относительно исходного положения, в котором на канат не воздействуют никакие поперечные силы.
В предпочтительном варианте осуществления, конфигурация устройства определения положения каната позволяет, на основе найденного расхождения величин параметров движения, определить отклонение каната в по меньшей мере одном первом канатном ролике от исходного положения, когда на канат не воздействуют никакие поперечные силы. Затем может быть показана непосредственно величина отклонения каната от исходного положения, например, если канат отжимается в поперечном направлении по оси вращения канатного ролика параллельно ему от нижней точки паза на боковую поверхность ролика в направляющем пазу.
В соответствии с предпочтительным вариантом осуществления изобретения, конфигурация устройства определения статуса безопасного функционирования может быть определена таким образом, чтобы статус безопасности функционирования транспортной системы был связан с положением каната в по меньшей мере одном первом канатном ролике, которое определяется датчиком положения каната. Аналогичным образом может быть определен и показан статус безопасности функционирования транспортной системы, когда положение каната определено датчиком положения каната.
Конфигурация вычислительного устройства обеспечивает определение расхождение величин параметров движения для по меньшей мере двух первых канатных роликов посредством сравнения первых величин параметров движения по меньшей мере двух первых канатных роликов и второй величины параметра движения реперного ролика. Благодаря определению расхождения величин параметров движения для по меньшей мере двух первых канатных роликов предсказание угрозы схода каната может быть сделано более точно и надежно. В частности, два первых канатных ролика могут быть установлены в одном и том же блоке роликов, хотя они также могут быть первыми канатными роликами в разных блоках роликов. Так, в транспортной системе, которая содержит не один блок роликов, а несколько блоков роликов, последний вариант обеспечивает контроль не просто одного блока роликов для определения опасности схода каната, а нескольких блоков или даже всех. Более того, в этом варианте обеспечивается некоторая избыточность или проверка достоверности при определении статуса безопасности функционирования транспортной системы. Таким образом может быть также более точно определен износ роликов, если вести контроль описанным образом двух или более первых канатных роликов.
Целесообразно ввести шкалу сравнительной оценки статуса безопасности функционирования, и использовать устройство, вырабатывающее сигнал статуса безопасности функционирования для генерирования сигнала статуса безопасности функционирования, который соответствует показателю статуса безопасности функционирования по шкале сравнительной оценки, соотнесенному с определенной величиной расхождения параметров движения. Шкала сравнительной оценки для статуса безопасности функционирования может показывать, в частности, насколько транспортная система подготовлена в отношении безопасности работы. Она может содержать оценки от 0% до 100% или, например, шкалу школьных отметок от 1 до 6. Однако могут быть указаны и различные конкретные состояния безопасности работы, например, "безупречная работа", "низкий риск", "повышенный риск" или "очень высокий риск" схода каната. С помощью устройства вырабатывания сигнала статуса безопасности функционирования, и с использованием найденных расхождений параметров движения, может генерироваться, в частности, сигнал статуса безопасности функционирования, который затем используется для индикации текущего статуса безопасности функционирования транспортной системы, согласно шкале сравнительной оценки.
В предпочтительном варианте, используется шкала сравнительной оценки статуса безопасности функционирования, и имеется устройство генерирования сигнала статуса безопасности функционирования для вырабатывания сигнала статуса безопасности функционирования, который соответствует показателю статуса безопасности функционирования на шкале сравнительной оценки, который соотнесен с отклонением каната от его исходного положения в по меньшей мере одном первом канатном ролике. С помощью подобного устройства генерирования сигнала статуса безопасности функционирования может вырабатываться сигнал статуса безопасности функционирования, величина которого соответствует некоторому статусу безопасности функционирования согласно шкале сравнительной оценки, поэтому сигнал статуса безопасности функционирования может быть определен косвенным путем и воспроизведен исходя из отклонения каната от его исходного положения в по меньшей мере одном первом канатном ролике.
В предпочтительном варианте, конфигурация устройства генерирования сигнала статуса безопасности функционирования выбирается таким образом, что найденные расхождения величин параметров движения по меньшей мере двух первых канатных роликов могут подвергаться обработке для вырабатывания сигнала статуса безопасности функционирования. Такое устройство генерирования сигнала статуса безопасности функционирования обеспечивает контроль двух или более первых канатных роликов и анализ опасности возможного схода каната с этих канатных роликов. В данном изобретении, это может относиться к первым канатным роликам одного блока роликов, или нескольких блоков роликов. В частности, также предполагается вести контроль всех блоков роликов транспортной системы, то есть по меньшей мере первого канатного ролика в каждом блоке роликов.
В устройство генерирования сигнала статуса безопасности функционирования целесообразно включить узел определения максимального значения, посредством которого может быть определено максимальное значение по меньшей мере двух расхождений величин параметров движения. Посредством узла определения максимального значения возможно, в частности, оценить, которое из двух или более расхождений величин параметров движения, полученных от двух или более первых роликов, имеет максимальное значение. В предпочтительном варианте, полученное таким образом максимальное значение самого большого расхождения величин параметров движения определяет статус безопасности функционирования всей транспортной системы. Кроме того, таким путем также может быть определено, в каком первом ролике или в каком блоке роликов транспортной системы существует наибольшая опасность схода каната.
Для обеспечения возможности обслуживающему персоналу транспортной системы вести простым и надежным путем контроль статуса безотказности функционирования транспортной системы, в предпочтительном варианте используется световое и/или звуковое индикаторное устройство для индикации сигнала статуса безопасности функционирования. Индикаторное устройство может, например, включать цветовую шкалу для индикации статуса безопасности функционирования, например, от красного до зеленого. Очевидно, что также может использоваться экран, на котором может отображаться статус безопасности функционирования транспортной системы в виде текста, символов или цветовых обозначений. Может использоваться звуковое индикаторное устройство в виде громкоговорителя, посредством которого вырабатывается звуковой сигнал, если статус безопасности функционирования достиг значения, критичного для работы транспортной системы. В частности, индикаторное устройство также может быть частью мобильного сигнализирующего устройства. Например, в качестве мобильного индикаторного устройства подходит мобильный телефон, который может обеспечивать индикацию светового и/или звукового сигнала статуса безопасности функционирования. В предпочтительном варианте, для оператора также может использоваться вибрационный сигнал индикации статуса безопасности функционирования. Также возможна передача сигнала статуса безопасности функционирования по электронной системе передачи коротких сообщений на мобильный телефон, например, так называемые SMS-сообщения. Также возможна и передача по электронной почте.
В предпочтительном варианте, используется устройство аварийной сигнализации для вырабатывания сигнала тревоги или отключения в том случае, если величина сигнала статуса безопасности функционирования превысит заданное предельное значение. Например, устройство аварийной сигнализации может включать вычислитель или устройство определения статуса безопасности функционирования. Вырабатываемый сигнал тревоги и/или сигнал отключения может отображаться или использоваться, например, для снижения скорости привода транспортной системы, или для ее отключения, или для передачи в устройство управления или регулировки транспортной системы для дальнейшей обработки.
Для того чтобы оператор мог распознать аварийное состояние, о котором сигнализирует устройство аварийной сигнализации, целесообразно использовать устройство световой и/или звуковой индикации сигнала тревоги для воспроизведения сигнала тревоги и/или отключения. Например, по аналогии с индикаторным устройством, устройство индикации сигнала тревоги может быть использовано для отображения сигнала статуса безопасности функционирования на пункте управления транспортной системы или в местах, где оператор может получить доступ к системе управления и/или регулировки транспортной системы.
В предпочтительном варианте, устройство аварийной сигнализации взаимодействует с устройством управления и/или регулировки приводного устройства транспортной системы, и его конфигурация обеспечивает возможность снижения скорости движения транспортной системы и/или отключения приводного устройства транспортной системы после выработки сигнала тревоги или отключения. Устроенное таким образом устройство аварийной сигнализации позволяет автоматически вмешаться в работу транспортной системы, то есть оператору нет необходимости распознавать определенное аварийное состояние и затем выполнять какие-либо действия в отношении работы транспортной системы. Более того, снижение скорости движения транспортной системы или ее отключение может быть выполнено автоматически при возникновении угрозы схода каната.
В предпочтительном варианте, конфигурация датчика величины параметра движения обеспечивает возможность определения одновременно первой и второй величин параметров движения. Так, например, расхождение величин параметров движения может быть определено вычислительным устройством практически одновременно с определением величин параметров движения, поэтому данные статуса безопасности функционирования и сопутствующий сигнал опасности схода каната могут быть выданы практически одновременно и в реальном времени.
Для компенсации возможных флуктуации при определении величин параметров движения, в предпочтительном варианте конфигурация датчика величины параметра движения обеспечивает возможность определения первой и второй величин параметров движения как функций времени, а конфигурация вычислительного устройства обеспечивает возможность определения среднего расхождения первой величины параметра движения и второй величины параметра движения на заданном временном интервале. Этим можно предотвратить необоснованное отключение транспортной системы или ненужное снижение ее скорости в случае незначительных флуктуации расхождения величин параметров движения, соответствующих критическому статусу функционирования. Интервал времени может, в принципе, иметь произвольную длину. Например, интервал времени может быть сделан равным от 0,5 с до 5 с для определения среднего расхождения величин параметров движения на этом временном интервале с последующим определением статуса безопасности функционирования транспортной системы на основе определенного среднего расхождения величин параметров движения.
Для сведения к минимуму влияния износа на датчик величины параметра движения, его конфигурация должна обеспечивать определение первой и/или второй величины параметров движения бесконтактным путем.
Особенно простой получается конструкция датчика величины параметра движения, если он выполнен в виде датчика скорости вращения или угловой скорости. При этом скорость вращения или угловая скорость по меньшей мере одного первого канатного ролика, а также и реперного ролика, может быть определена простым путем. Различия скоростей вращения или угловых скоростей между по меньшей мере одним первым канатным роликом и реперным роликом могут быть просто определены вычислительным устройством, и тем самым может быть определено расхождение величин параметров движения, которое, в свою очередь, служит основой для установления статуса безопасности функционирования транспортной системы.
Особенно простой конструкция датчика скорости вращения или угловой скорости получается при использовании в ней элемента, вырабатывающего тактовые импульсы, который может быть соединен с канатным роликом, параметры движения которого необходимо измерить, без взаимного вращения, и по меньшей мере одного датчика для определения вращения элемента, вырабатывающего тактовые импульсы. В частности, вращение элемента, вырабатывающего тактовые импульсы, может быть при этом определено бесконтактным путем индуктивным или емкостным бесконтактным переключателем. В предпочтительном варианте, элемент, вырабатывающий тактовые импульсы, может быть выполнен в виде кодового диска, по периферии которого равномерно размещено несколько тактирующих элементов. При этом перемещение тактирующих элементов относительно датчика определяется достаточно просто. Например, тактирующие элементы могут быть выполнены в виде магнитов. Для обеспечения хорошего разрешения, целесообразно использовать несколько тактирующих элементов на единицу угла. В результате, величина параметра движения по меньшей мере одного первого канатного ролика или реперного ролика может быть определена, даже если соответствующий ролик не сделал полного оборота. Особенно простой конструкция кодового диска получается, если тактирующие элементы выполнены в виде вступающих наружу или вдоль оси выступов, образующих периодическую зубчатую структуру.
Для упрощения определения перемещения элемента, вырабатывающего тактовые импульсы, в частности, посредством емкостных или индуктивных бесконтактных датчиков, элемент, вырабатывающий тактовые импульсы, целесообразно по меньшей мере частично выполнить из металла. В предпочтительном варианте, тактирующие элементы выполняются из металла.
В предпочтительном варианте осуществления, элемент, вырабатывающий тактовые импульсы, имеет противообледенительный слой. Этот слой защищает элемент, вырабатывающий тактовые импульсы, от обледенения, в результате которого наросшим льдом может быть поврежден датчик, расположенный на некотором расстоянии от элемента, вырабатывающего тактовые импульсы.
Наиболее целесообразным, с точки зрения технологии изготовления и эффективности защиты, является использование противообледенительного слоя из синтетического материала.
В предпочтительном варианте, в качестве датчика используется бесконтактный индуктивный или емкостной чувствительный элемент. Датчиком такого типа величина параметра движения канатного ролика может быть бесконтактно определен простым и надежным способом.
В соответствии с предпочтительным вариантом осуществления изобретения, конфигурация датчика величины параметра движения может обеспечивать определение величины параметра движения входного ролика и/или выходного ролика блока роликов, который образует по меньшей мере один первый канатный ролик. Угроза схода каната в блоке роликов возникает в первую очередь на его входном ролике или выходном ролике, поскольку эти ролики в наименьшей мере могут поглощать поперечные силы, действующие на канат. В результате, статус безопасности функционирования транспортной системы наиболее точно может быть определен на входных роликах или выходных роликах блока роликов путем сравнения их величин параметров движения с величиной параметра движения реперного ролика.
В предпочтительном варианте, конфигурация датчика величины параметра движения должна обеспечивать определение величины параметра движения внутреннего канатного ролика, расположенного между соседними канатными роликами и образующего реперный ролик. Внутренний канатный ролик, расположенный между соседними канатными роликами, особенно хорошо подходит для реперного ролика, поскольку действующие на канат поперечные силы на положение каната на реперном ролике влияют в минимальной степени. Вследствие этого, положение каната относительно такого реперного ролика изменяется очень незначительно, либо не изменяется вовсе, в то время как положение каната на входном ролике или выходном ролике может изменяться существенно из-за действия на канат поперечных сил. Используя определяемое расхождение величин параметров движения между первой величиной параметра движения по меньшей мере одного первого канатного ролика и реперного ролика, можно простым и надежным способом определить статус безопасности функционирования транспортной системы.
Особенно большие преимущества могут быть получены при использовании описанных выше устройств контроля положения каната в транспортной системе в виде подвесной канатной дороги. Благодаря использованию подобного устройства контроля положения каната канатная дорога может быть остановлена, в частности, задолго до схода каната, а значит, своевременно, до происшествия, которое, в худшем случае, может сопровождаться человеческими жертвами.
Описанные выше устройства контроля положения каната целесообразно использовать для контроля положения несущего, тягового и/или подъемного каната транспортной системы с канатным приводом. Особенно подходят устройства контроля положения каната для контроля положения каната любого типа, который движется при работе транспортной системы с канатным приводом.
Более того, описанные выше устройства контроля положения каната обеспечивают преимущество при использовании их для контроля положения каната, проходящего по направляющим канатным роликам, имеющим наружный направляющий паз.
Согласно изобретению, поставленная выше цель достигается в транспортной системе с канатным приводом описанного выше типа за счет того, что для определения первой величины параметра движения по меньшей мере одного первого канатного ролика и второй величины параметра движения реперного ролика используется датчик величины движения; для сравнения первой и второй величин параметров движения и для определения взаимного расхождения величин параметров движения между первой и второй величинами параметров движения, которое соответствует статусу безопасности функционирования транспортной системы, используется вычислительное устройство. Транспортная система с канатным приводом такого типа отвечает самым высоким требованиям безопасности, поскольку при эксплуатации транспортной системы с канатным приводом можно использовать устройство контроля положения каната, в частности одно из устройств контроля положения каната, описанных выше, таким образом, что определяется угроза схода каната и можно вмешаться в работу системы, например снизить скорость движения или отключить.
В предпочтительном варианте, транспортная система с канатным приводом содержит одно из описанных выше устройств контроля положения каната. Все описанные выше преимущества также относятся к транспортной системе в целом.
В предпочтительном варианте, канат представляет собой несущий, тяговый и/или подъемный канат. Поэтому устройство контроля положения каната может быть использовано для контроля всех передвигаемых канатов в системе, где существует опасность схода канатов.
Целесообразно использовать несколько блоков роликов, а также по меньшей мере для двух блоков роликов использовать соответствующие устройства контроля положения каната или общее такое устройство. Преимущество использования нескольких блоков роликов состоит в том, что обеспечивается высокая надежность и четкость направления движимого каната транспортной системы. Кроме того, при увеличении числа роликов в каждом блоке роликов, процесс направления каната становится более совершенным. Конфигурация устройства контроля положения каната может быть приспособлена только для одного блока роликов, или общее устройство контроля положения каната может использоваться для двух или более блоков роликов. Кроме того, преимуществом описанных выше устройств контроля положения каната является то, что ими легко оснастить даже и существующие транспортные системы. Например, для блока роликов достаточно использовать два датчика движения для определения первой и второй величины параметра движения по меньшей мере одного первого канатного ролика и реперного ролика.
Далее, согласно изобретению, поставленная выше цель достигается описанным выше способом, в котором определяются первая величина параметра движения по меньшей мере одного первого канатного ролика и вторая величина параметра движения реперного ролика, производится сравнение первой величины параметра движения по меньшей мере одного первого канатного ролика и второй величины параметра движения реперного ролика, и определяется взаимное расхождение между первой и второй величинами параметров движения, соответствующее статусу безопасности функционирования транспортной системы. В принципе, также возможно определить первую и вторую величины параметров движения по меньшей мере первого канатного ролика и реперного ролика, когда два канатных ролика установлены не в общем блоке роликов, а на различных блоках роликов. В принципе, два произвольно выбранных канатных ролика транспортной системы могут быть использованы описанным образом для определения расхождения величин параметров движения и индикации статуса безопасности функционирования транспортной системы на основе величины расхождения величин параметров движения. Как правило, чем больше взаимное расхождение величин параметров движения между первой и второй величинами параметров движения, тем более критичным становится статус безопасности функционирования.
В предпочтительном варианте, положение каната в по меньшей мере одном первом канатном ролике определяется из найденного расхождения величин параметров движения, а статус безопасности функционирования транспортной системы ассоциируется с положением каната в по меньшей мере одном первом канатном ролике. Если происходит изменение положения каната относительно по меньшей мере одного первого канатного ролика, то обычно изменяется и его величина параметра движения. Это основано на том, что канат обычно направляется направляющим пазом в канатном ролике. Если канат сдвигается относительно по меньшей мере одного первого канатного ролика из-за воздействующих поперечных сил, он отклоняется в поперечном направлении наружу из самого нижнего положения в направляющем пазу по его боковой поверхности и в сторону от оси вращения канатного ролика, при этом эффективный радиус первого направляющего паза для каната изменяется. Из-за изменения положения каната, радиус, как правило, увеличивается. Если канат движется с постоянной скоростью, то происходит изменение скорости вращения или угловой скорости по меньшей мере одного первого канатного ролика. Она становится меньше из-за увеличившегося радиуса. В частности, при известной геометрии направляющего ролика положение каната несложно определить из расхождения величин параметров движения. Помимо этого, с положением каната может быть легко сопоставлен статус безопасности функционирования транспортной системы.
В предпочтительном варианте производится определение отклонения каната от исходного положения в по меньшей мере одном первом канатном ролике в отсутствие действующих на канат поперечных сил на основе измеренного расхождения величин параметров движения. На основе этого может быть определено абсолютное отклонение каната относительно исходного положения.
В предпочтительном варианте, расхождение величин параметров движения определяется для по меньшей мере двух первых канатных роликов путем сравнения первой величины параметра движения по меньшей мере двух первых канатных роликов и второй величины параметра движения реперного ролика. Преимуществом определения расхождения величин параметров движения для по меньшей мере двух первых канатных роликов является, в частности, то, что в результате такой избыточности исключаются ошибки измерения.
В предпочтительном варианте, расхождение величин параметров движения сопоставляется со шкалой сравнительной оценки статуса безопасности функционирования, и вырабатывается сигнал статуса безопасности функционирования, соответствующий расхождению величин параметров движения, причем этот сигнал соответствует заданному показателю безопасности функционирования по шкале сравнительной оценки. Шкала сравнительной оценки может быть, в частности, шкалой сравнительной оценки описанного выше типа. Сигнал статуса функционирования подходит, в частности, для дальнейшей автоматической обработки, то есть он может быть использован для дальнейшей обработки в устройствах управления и/или регулирования транспортной системы.
В предпочтительном варианте, отклонение каната от исходного положения в по меньшей мере одном первом канатном ролике сопоставляется со шкалой сравнительной оценки статуса безопасности функционирования, и вырабатывается сигнал статуса безопасности функционирования, соответствующий расхождению величин параметров движения, причем этот сигнал соответствует заданному показателю статуса безопасности функционирования по шкале сравнительной оценки. Таким образом, принятие решения относительно статуса безопасности функционирования выполняется просто на основании отклонения каната, и решение может быть затем отражено индикатором.
В предпочтительном варианте, при выработке сигнала статуса безопасности функционирования производится обработка относительных расхождений параметров движения от по меньшей мере двух первых канатных роликов. Преимуществом такой схемы является то, что могут не учитываться возможные ошибки измерения, которые могут возникнуть при определении расхождения величин параметров движения для первого канатного ролика. Кроме того, благодаря такой процедуре, улучшается общая эксплуатационная безопасность транспортной системы, поскольку угроза схода каната может быть обнаружена в двух или более местах, а работа транспортной системы может быть отрегулирована заблаговременно.
В предпочтительном варианте, величина сигнала статуса безопасности функционирования соответствует большему из найденных расхождений величин параметров движения, определенных для по меньшей мере двух первых канатных роликов путем сравнения первой величины параметра движения по меньшей мере двух первых канатных роликов и второй величины параметра движения реперного ролика. При этом может быть выработан сигнал статуса безопасности функционирования, когда статус безопасности функционирования транспортной системы определяется величиной найденных расхождений величин параметров движения. Как правило, большее из найденных расхождений величин параметров движения определяет статус безопасности функционирования в том месте, где наиболее высока опасность схода каната.
Для предъявления оператору в простой и достоверной форме фактического статуса безопасности функционирования транспортной системы, целесообразно использовать световую и/или звуковую индикацию сигнала статуса безопасности функционирования.
В предпочтительном варианте, сигнал тревоги и/или отключения вырабатывается, если величина сигнала статуса безопасности функционирования превосходит заданный предел. Благодаря тому, что сигнал тревоги и/или отключения вырабатывается автоматически, вмешательство в работу транспортной системы может быть сведено, например, к автоматическому взаимодействию с устройством управления и/или регулирования транспортной системы, либо может выполняться вручную, когда оператор использует устройство управления и/или регулирования транспортной системы в соответствии с полученным сигналом тревоги и/или отключения.
В предпочтительном варианте, для того чтобы оператор мог незамедлительно обнаружить наличие статуса безопасности функционирования, которому соответствует сигнал тревоги и/или отключения, используется световая и/или звуковая индикация сигнала тревоги и/или отключения.
В предпочтительном варианте, для уменьшения опасности схода каната снижается скорость движения транспортной системы, или производится отключение привода транспортной системы, либо транспортная система отключается по выработанному сигналу тревоги или отключения.
Для того чтобы расхождение величин параметров движения определялось без задержки, целесообразно первую и вторую величины параметров движения определять одновременно. При этом расхождение величин параметров движения, найденное сравнением первой и второй величин параметров движения, соответствует расхождению величин параметров движения в тот момент времени, когда они были определены.
В соответствии с предпочтительным вариантом осуществления предложенного в изобретении способа, первая и вторая величины параметров движения могут определяться как функции времени, и среднее расхождение первой и второй величин параметров движения может определяться за заданный промежуток времени. При такой схеме могут быть скомпенсированы возможные флуктуации скорости каната на некотором временном интервале. Более того, этим можно предотвратить отключение транспортной системы без достаточных оснований в случае возникающих кратковременных расхождений параметров движения.
Для сведения к минимуму износа транспортной системы с целью увеличения срока ее службы целесообразно определение первой и второй величин параметров движения выполнять бесконтактным путем.
В предпочтительном варианте, первый и/или второй параметр движения определяются в виде скорости вращения по меньшей мере одного первого канатного ролика и/или реперного ролика. Скорость вращения канатных роликов может быть определена простыми средствами, например датчиком скорости вращения.
В предпочтительном варианте, первый и/или второй параметр движения определяются в виде угловой скорости по меньшей мере одного первого канатного ролика и/или реперного ролика. Угловая скорость канатного ролика также может быть определена простыми средствами с использованием подходящих датчиков угловой скорости.
Первую и/или вторую величину параметра движения целесообразно определять датчиками скорости вращения или угловой скорости. Например, первая и/или вторая величины рабочих параметров могут быть при этом определены простыми средствами с использованием датчиков скорости вращения или угловой скорости.
В предпочтительном варианте, входной ролик и/или выходной ролик блока роликов, образующие концевые канатные ролики блока роликов, выбираются в качестве по меньшей мере одного первого канатного ролика. Как было указано выше, влияние поперечной силы на канат наиболее сильно проявляется на входных и/или выходных роликах блока роликов. В результате опасность схода каната также максимальна на этих роликах. Как правило, канат сначала соскакивает со входного или выходного роликов. Под концевым канатным роликом блока роликов понимается первый или последний канатный ролик блока роликов, которым ограничивается длина каната до соседнего блока роликов.
В качестве реперного ролика целесообразно выбирать канатный ролик, образующий внутренний канатный ролик, расположенный между двумя соседними канатными роликами. В предпочтительном варианте, этот канатный ролик располагается как можно ближе к середине блока роликов. Например, в случае блока канатных роликов, содержащего семь канатных роликов, в качестве реперного ролика желательно выбирать четвертый, то есть средний канатный ролик. Чем дальше расположен реперный ролик в блоке роликов от входного или выходного роликов, тем слабее влияние поперечной силы, действующей на канат. При этом заметное изменение в статусе безопасности функционирования может быть обнаружено более точно и надежно, если в качестве реперного ролика выбирается внутренний канатный ролик.
В предпочтительном варианте, способ контроля положения каната используется в транспортной системе в виде канатной дороги. Благодаря этому может быть, в частности, уменьшена опасность происшествия в связи с возможным сходом каната.
Данный способ целесообразно использовать для контроля положения несущего, тягового и/или подъемного каната в транспортной системе. Поскольку, на практике, каждый из перечисленных выше канатов может соскочить с направляющих роликов, способ особенно полезен для контроля угрозы схода каната любого из упомянутых выше типов каната.
Особенно большие преимущества дает использование данного способа для канатных роликов, имеющих наружный направляющий паз для каната. Канатный направляющий паз, который также называется направляющим желобом, служит для придания направления канату в поперечной плоскости. Используя данный способ, можно весьма простыми средствами установить, когда канат выходит из канатного направляющего паза под действием воздействующих на него поперечных сил. Если канат сползает вверх по боковой стенке паза и под воздействием поперечных сил начинает смещаться из канатного направляющего паза, у канатного ролика происходит изменение эффективного радиуса относительно каната, обычно в сторону увеличения. В результате при неизменной скорости движения каната скорость вращения канатного ролика, вращаемого канатом, уменьшается. Это изменение величины параметра движения может быть обнаружено и сопоставлено с величиной параметра движения, полученной от реперного ролика, и по результатам сравнения может быть определен статус безопасности транспортной системы.
Особенно предпочтительным является применение данного способа с канатным роликом, у которого канатный направляющий паз в поперечном сечении представляет сегмент круга. Ролики этого типа особенно просты в изготовлении, а также обладают хорошими направляющими свойствами для каната при воздействии на канат поперечных сил.
Приведенное ниже описание предпочтительных вариантов осуществления изобретения предназначено для его более подробного пояснения со ссылкой на чертежи, на которых:
на фиг.1 схематически показаны две опоры и блоки роликов подвесной канатной дороги при увеличенной нагрузке;
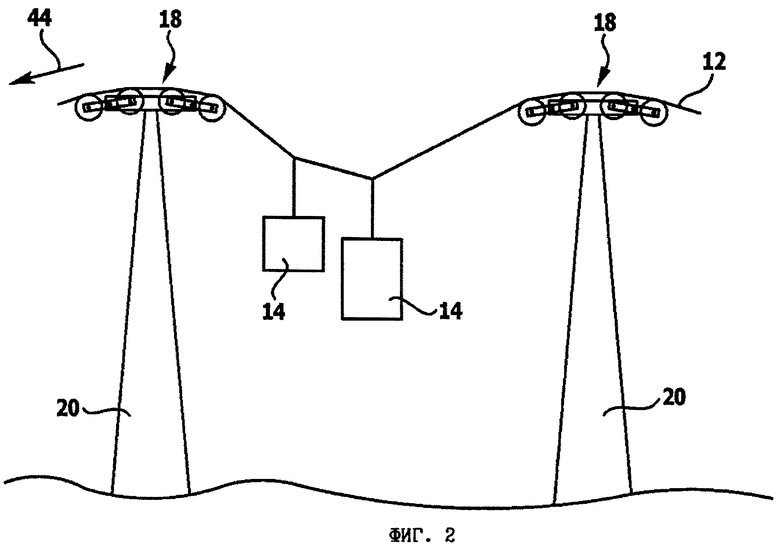
на фиг.2 схематически показаны две опоры и блоки роликов подвесной канатной дороги при небольшой нагрузке;
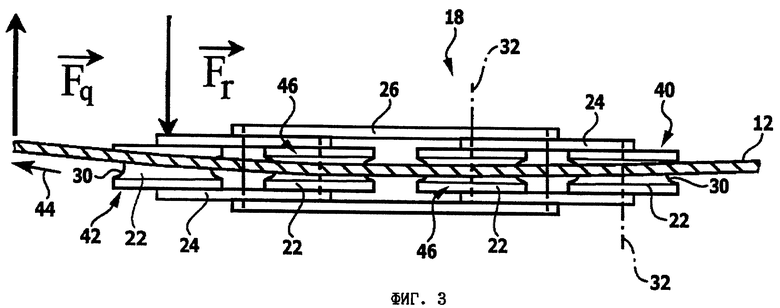
на фиг.3 приведен вид сверху блока роликов с воздействующими на канат поперечными силами;
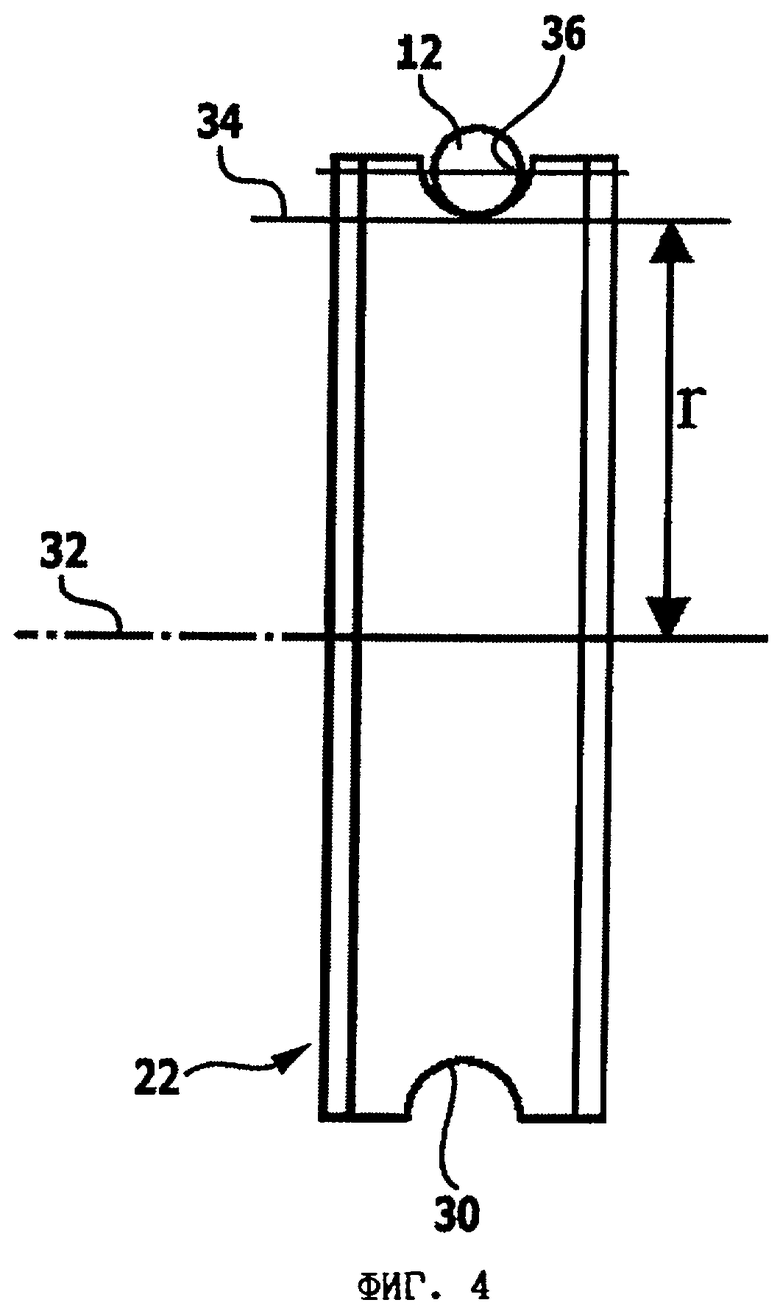
на фиг.4 представлен вид сечения канатного ролика в отсутствие поперечных сил, воздействующих на направляемый роликом канат;
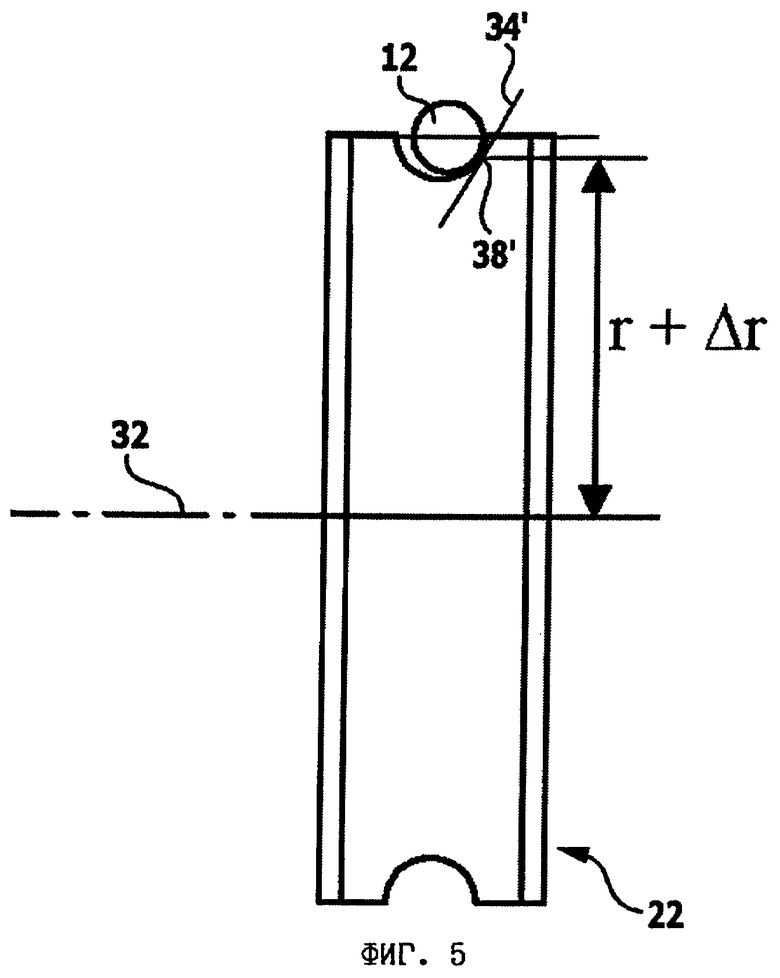
на фиг.5 представлен вид сечения, аналогичный виду на фиг.4, но при воздействии на канат поперечной силы;
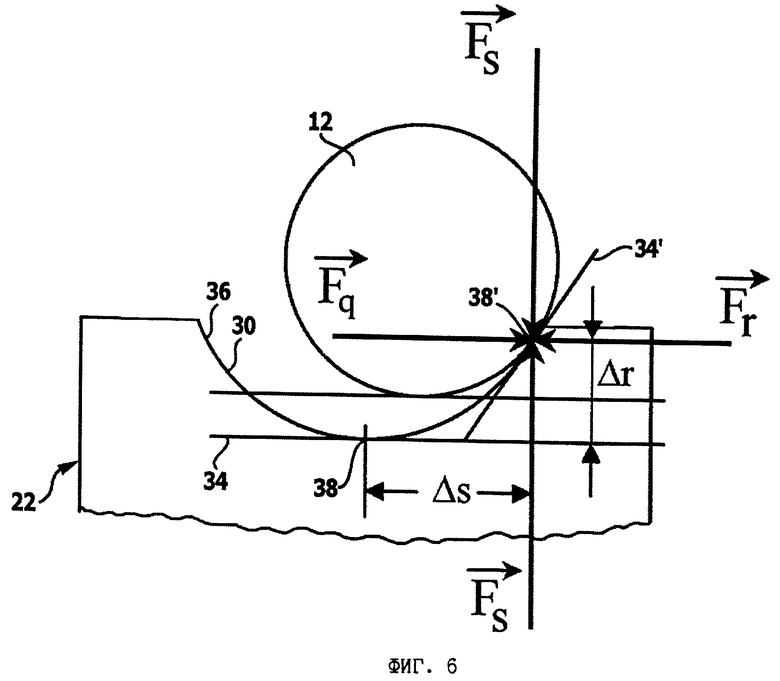
на фиг.6 показан увеличенный фрагмент изображения на фиг.5;
на фиг.7 представлен вид сечения кодового диска;
на фиг.8 схематически изображено устройство контроля положения каната в транспортной системе с канатным приводом; и
на фиг.9 приведен алгоритм, иллюстрирующий способ контроля положения каната в транспортной системе с канатным приводом.
На чертежах схематично изображена транспортная система 10 с канатным приводом, представляющая собой подвесную канатную дорогу. Она содержит канат 12, к которому прикреплены, например, кресла или вагончики для перевозки людей или гондолы 14 для транспортировки грузов. Конфигурация и размещение приводного устройства 16 обеспечивают движение каната 12, имеющего, в предпочтительном варианте, форму замкнутой петли, который перемещает грузовые гондолы 14 вдоль транспортной системы 10 по замкнутому пути.
Для направления каната 12 используются блоки 18 роликов, закрепленные на опорах 20. Блоки 18 роликов, называемые также группами роликов, содержат несколько канатных роликов (шкивов), обозначенных в общем ссылочным номером 22. В приведенном в качестве примера варианте осуществления транспортной системы 10, показанном на чертежах, каждый блок 18 роликов содержит четыре канатных ролика 22. В каждом случае, два канатных ролика 22 закреплены с возможностью вращения на коромысле 24, которое шарнирно закреплено на поперечной балке 26 на свободном конце опоры 20. В зависимости от величины нагрузки на канат 12, создаваемой грузовыми гондолами 14 в пролете 28 между двумя блоками 18 роликов, коромысла 24 больше или меньше наклоняются относительно поперечных балок 26. Чем больше наклон, тем большая нагрузка действует на канат 12 со стороны грузовых гондол 14 в пролете 28, что проиллюстрировано на фиг.1 и 2.
Блоки 18 роликов могут быть выполнены в виде опорной конструкции блока роликов, в которой канат опирается на канатные ролики 22 блока 18 роликов, как это показано на фиг.1 и 2. В альтернативном варианте, блоки роликов могут быть выполнены в виде прижимной конструкции блока роликов, в которой канат 12 прижимается вниз блоком 18 роликов и давит на ролики 22 в направлении, противоположном силе притяжения. Например, схематическое изображение на фиг.3 соответствует виду снизу блока 18 роликов в виде прижимного блока роликов.
У канатных роликов 22 по окружности имеются открытые наружу по радиусу канатные направляющие пазы 30 в форме направляющих желобов, поперечное сечение которых имеет вид сегмента круга. Если на канат 12 не действуют внешние поперечные силы, то канат 12 лежит в канатном направляющем пазу 30 симметрично относительно центральной плоскости, перпендикулярной оси 32 вращения, относительно которой может вращаться канатный ролик 22. При этом эффективный радиус канатного ролика 22 определяется расстоянием г между осью 32 вращения и касательной 34 к канатному направляющему пазу 30, которая параллельна оси 32 вращения.
Из-за ветра, особенно ураганного, а также из-за раскачивания грузовых гондол 14, возникают поперечные силы Fq, например, показанные на фиг.3, которые могут отклонить канат из описанного выше исходного положения, показанного на фиг.4. Отклонение каната 12 из его исходного положения проявляется, в основном, в том, что канат 12 выталкивается поперек вверх на внутреннюю поверхность 36 канатного направляющего паза 30 так, что изменяется расстояние между канатом 12 и осью вращения 32. Эффективный радиус  каната канатного ролика 22 в отклоненном состоянии определяется расстоянием между точкой 38', где канат 12 касается внутренней поверхности 36 канатного направляющего паза 30, и осью 32 вращения. Эта точка 38' касания определяется касательной 34' к канатному направляющему пазу 30. Чем больше поперечная сила Fq, воздействующая на канат 12, тем дальше канат 12 отклоняется от исходного положения. В наихудшем случае канат 12 полностью выходит из канатного направляющего паза 30 и соскакивает с канатного ролика 22. Опасность схода каната тем выше, чем больше величина поперечной силы Fq, воздействующей на канат 12. Положение каната 12 в канатном направляющем пазу 30 определяется, с одной стороны, поперечной силой Fq, и возвращающей силой Fr, приложенной канатным роликом 22, с другой стороны. В каждом случае, в зависимости от воздействующей поперечной силы Fq, устанавливается равновесие с соответствующим эффективным радиусом
каната канатного ролика 22 в отклоненном состоянии определяется расстоянием между точкой 38', где канат 12 касается внутренней поверхности 36 канатного направляющего паза 30, и осью 32 вращения. Эта точка 38' касания определяется касательной 34' к канатному направляющему пазу 30. Чем больше поперечная сила Fq, воздействующая на канат 12, тем дальше канат 12 отклоняется от исходного положения. В наихудшем случае канат 12 полностью выходит из канатного направляющего паза 30 и соскакивает с канатного ролика 22. Опасность схода каната тем выше, чем больше величина поперечной силы Fq, воздействующей на канат 12. Положение каната 12 в канатном направляющем пазу 30 определяется, с одной стороны, поперечной силой Fq, и возвращающей силой Fr, приложенной канатным роликом 22, с другой стороны. В каждом случае, в зависимости от воздействующей поперечной силы Fq, устанавливается равновесие с соответствующим эффективным радиусом  , как, например, показано на фиг.3-6.
, как, например, показано на фиг.3-6.
Максимальное отклонение каната 12 от исходного положения наблюдается на канатных роликах 22, образующих входные ролики 40 и выходные ролики 42. Входной ролик 40 образован канатным роликом 22, на который набегает канат 12 из пролета 28 в направлении движения 44. Как у входного ролика 40, так и у выходного ролика 42 блока 18 роликов, в обоих случаях есть только один смежный канатный ролик 22. Два других канатных ролика 22 блока 18 роликов образуют так называемые внутренние ролики, которые в настоящем описании также называются реперными (эталонными) роликами 46. Внутренние ролики определены их расположением между двумя соседствующими с ними канатными роликами 22, причем в настоящем варианте осуществления, используемым в качестве примера, расположением между входным роликом 40 и канатным роликом 22, либо между канатным роликом 22 и выходным роликом 42.
При возникновении поперечных сил Fq, максимальное отклонение каната 12 происходит в канатном направляющем пазу 30 входного ролика 40 или выходного ролика 42. Причина этого в том, что в каждом случае имеется только один соседний канатный ролик 22, дополнительно способствующий приложению возвращающей силы Fr. Отклонение каната в пределах области реперных роликов 46 значительно меньше по сравнению со входным роликом 40 и выходным роликом 42, поскольку в каждом случае, в дополнение к реперному ролику 46, соседние канатные ролики 22 прилагают возвращающую силу Fr, которая противодействует поперечным силам Fq.
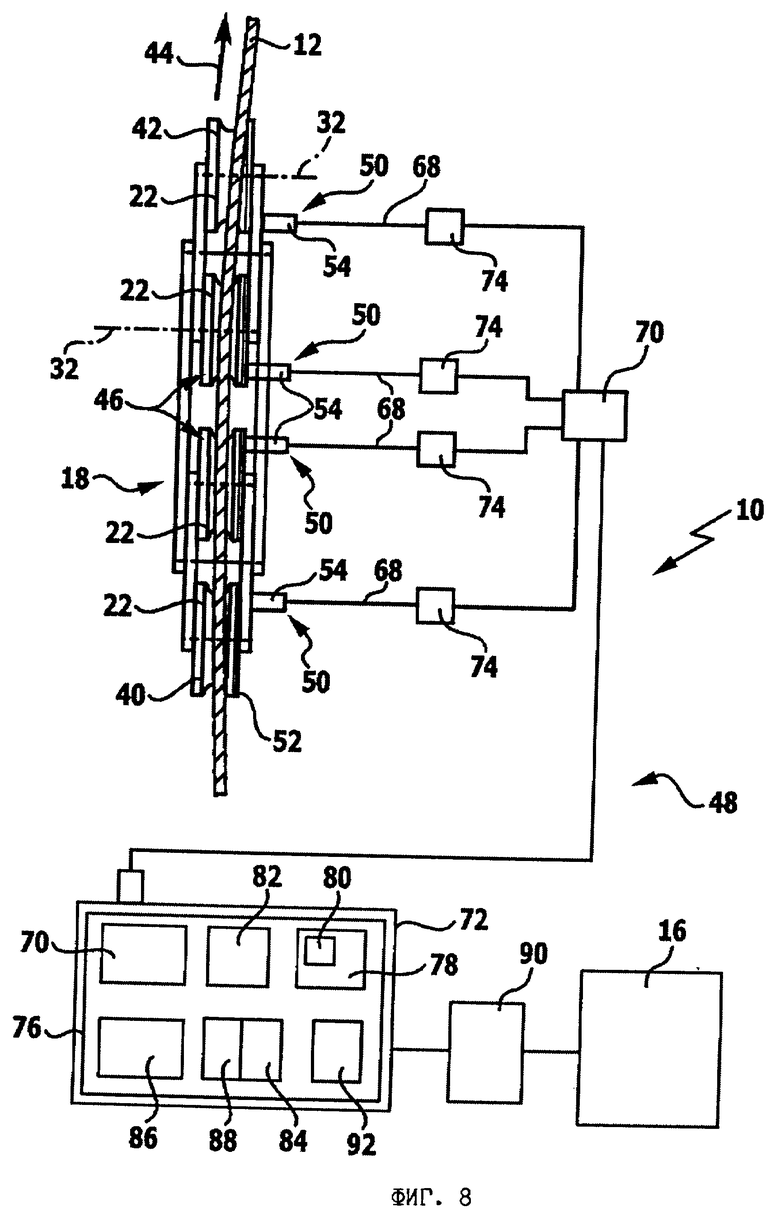
Для определения статуса безопасности транспортной системы 10 используется устройство контроля положения каната, имеющее в целом числовое обозначение 48. Оно содержит по меньшей мере один датчик 50 величины параметра движения, связанный с двумя канатными роликами 22. В настоящем варианте осуществления, используемом в качестве примера, применяются два датчика 50 величины параметра движения, соединенные с канатным роликом 22 блока 18 роликов. В предпочтительном варианте, датчик 50 величины параметра движения связан с одним из двух реперных роликов 46, а другой датчик 50 величины параметра движения связан с входным роликом 40 и/или выходным роликом 42.
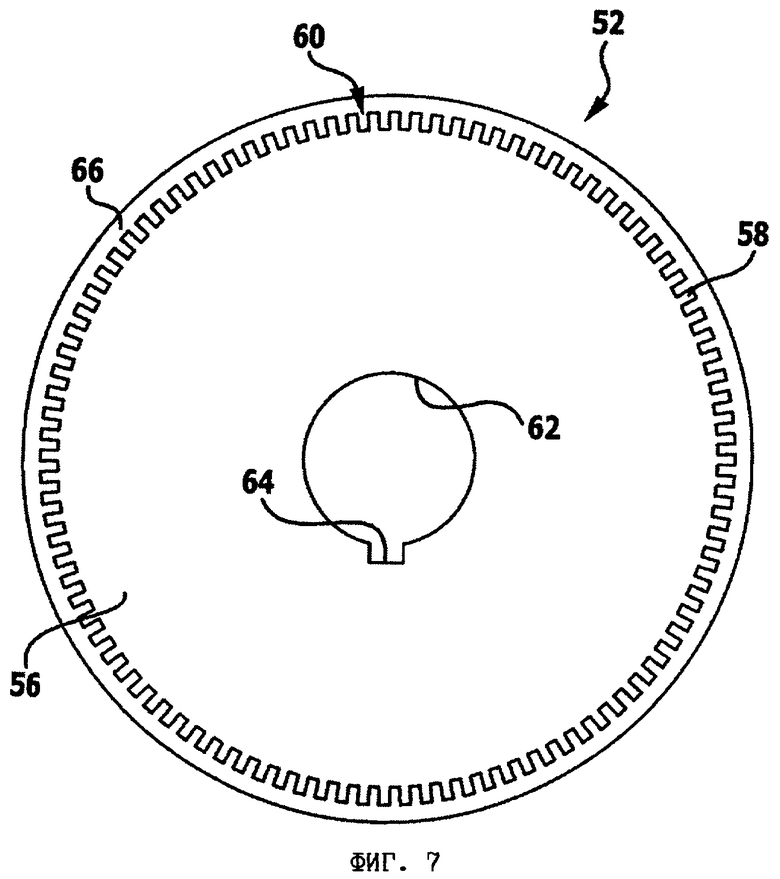
Датчик 50 величины параметра движения содержит элемент 52, вырабатывающий тактовые импульсы, который соединен без возможности взаимного вращения с соответствующим канатным роликом 22 и имеет вид кодового диска, а также чувствительный элемент 54, например, емкостной или индуктивный бесконтактный чувствительный элемент, посредством которого определяется вращение элемента 52, вырабатывающего тактовые импульсы. Кодовый диск имеет форму плоского металлического кольца 56, по наружному краю которого нарезаны зубцы 60, образующие совокупность тактирующих элементов в форме выступающих зубьев 58. Кольцо 56, для примера схематически показанное на фиг.7, имеет центральное круглое сквозное отверстие 62, в котором имеется вырез квадратного сечения, указывающий в направлении центра отверстия, и в который входит с зацеплением не показанный здесь выступ вала соответствующего ролика 22, вследствие чего элемент 52, вырабатывающий тактовые импульсы, вращается с той же скоростью, что и связанный с ним канатный ролик 22.
Кольцо 56 с зубьями 60 имеет противообледенительный слой 66 в виде покрытия синтетического материала, которое предотвращает возможность нарастания льда на элементе 52, вырабатывающем тактовые импульсы.
Чувствительные элементы 54 прикреплены к блоку 18 роликов таким образом, что они в состоянии обнаруживать движение зубьев 58. Они вырабатывают тактовые импульсы, которые подаются по линиям 68 передачи сигнала на вычислительное устройство 70. Вычислительное устройство 70 может быть установлено вблизи блока 18 роликов, например, на опоре 20. В варианте выполнения, приведенном в качестве примера на фиг.8, вычислительное устройство 70 также может быть установлено вблизи поста 72 управления транспортной системы 10. Также возможно включение преобразовательного узла 74 между чувствительным элементом 54 и вычислительным устройством 70, причем этот преобразовательный узел служит для преобразования сигнала, вырабатываемого чувствительным элементом 54 в сигнал скорости вращения, и подачи его в вычислительное устройство 70.
Параметр движения соответствующего канатного ролика 22, например, скорость вращения или угловая скорость, может быть определен датчиком 50 величины параметра движения. При этом датчик величины параметра движения является либо датчиком скорости вращения, либо датчиком угловой скорости. Конфигурация вычислительного устройства 70 обеспечивает выполнение сравнения найденных величин параметров движения, например, с определением разницы между ними. Например, разница между сигналом чувствительного элемента от чувствительного элемента 54, связанного с входным роликом 40 или выходным роликом 42, который может быть сопоставлен с сигналом чувствительного элемента от чувствительного элемента 54, связанного с одним из реперных роликов 46, с определением расхождения величин параметров движения, например, разницы скоростей вращения. По найденной разнице скоростей вращения двух канатных роликов, контроль которых ведется, может быть определено отклонение каната 12 от его исходного положения в канатном ролике 22, например, входном канатном ролике 40 или выходном канатном ролике 42. Это возможно на основании того, что канат 12 движется относительно двух канатных роликов 22 с постоянной скоростью, в то время как соответствующие эффективные радиусы r и двух канатных роликов 22 отличаются при наличии поперечных сил. В результате оказывается, что скорость вращения входного ролика 40 или выходного ролика 42 меньше, чем скорость вращения реперного ролика 46. Чем больше разница Δr между соответствующими эффективными радиусами r и , тем больше отклонение каната 12 от его исходного положения на канатном ролике 22, контроль которого ведется. Следовательно, также и более высока опасность схода каната при большем расхождении величин параметров движения, например различия скоростей вращения входного ролика 40 или выходного ролика 42 и одного из реперных роликов 46.
Например, на посту 72 управления может находиться устройство 76 определения статуса безопасности функционирования, которое может также включать в себя и вычислительное устройство 70. Статус безопасности функционирования транспортной системы 10 может быть определен с помощью устройства 76 определения статуса безопасности функционирования на основе по меньшей мере одного относительного расхождения параметров движения. Для этого, в предпочтительном варианте, в память 78 устройства 76 определения статуса безопасности функционирования вносится шкала 80 сравнительной оценки. Шкала 80 сравнительной оценки предназначена для сопоставления показателя статуса безопасности функционирования найденной величине расхождения величин параметров движения. Для этого служит устройство 82 генерирования сигнала статуса безопасности функционирования, посредством которого вырабатывается сигнал статуса безопасности функционирования, соответствующий показателю статуса безопасности функционирования по шкале сравнительной оценки, который назначен относительным расхождениям величин параметров движения.
Индикаторное устройство 84 служит для световой и/или звуковой индикации сигнала статуса безопасности функционирования. Индикаторное устройство 84 может представлять собой, например, монитор и/или громкоговоритель.
Далее, устройство 76 определения статуса безопасности функционирования содержит устройство 86 аварийной сигнализации для вырабатывания сигнала тревоги или сигнала отключения, если величина сигнала статуса безопасности функционирования превысит заданное граничное значение, которое может, например, храниться в памяти 78. Кроме того, для индикации сигнала тревоги может быть использовано устройство 88 индикации сигнала тревоги. В частности, оно может быть объединено с индикаторным устройством 84. Устройство 88 индикации сигнала тревоги служит для световой и/или звуковой индикации соответствующего сигнала тревоги и/или отключения.
Сигнал тревоги и/или отключения может быть передан устройством 76 определения статуса безопасности функционирования в устройство 90 управления и/или регулирования транспортной системы 10, которое выполняет требуемые действия в отношении приводного устройства 16 транспортной системы 10 в зависимости от величины сигнала тревоги и/или отключения, например, снижает скорость движения каната 12 или отключает приводное устройство 16, либо транспортная система 10 полностью выключается для предотвращения схода каната.
Далее, устройство 76 определения статуса безопасности функционирования может содержать датчик 92 положения каната для определения положения каната 12 на по меньшей мере одном первом канатном ролике 22. Конфигурация датчика 92 положения каната может обеспечивать определение отклонения каната 12, на который воздействуют поперечные силы Fq, от исходного положения в по меньшей мере одном канатном ролике 22, когда на него не действуют поперечные силы Fq, на основании найденного расхождения величин параметров движения. Более того, в предпочтительном варианте, конфигурация устройства 76 определения статуса безопасности функционирования обеспечивает связь положения каната 12 в по меньшей мере одном первом канатном ролике 22, которое было определено датчиком 92 положения каната, со статусом безопасности функционирования транспортной системы 10.
Далее, в предпочтительном варианте, конфигурация датчиков 50 величины параметров движения обеспечивает одновременное определение с их помощью величин параметров движения канатных роликов 22, с которыми они связаны. Как вариант, конфигурация устройства 82 генерирования сигнала статуса безопасности функционирования обеспечивает определение посредством датчиков 50 величин параметров движения первой и второй величин параметров движения как функций времени, а конфигурация вычислительного устройства 70 обеспечивает определение средних расхождений первой величины параметра движения и второй величины параметра движения на заданном временном интервале. Этот временной интервал может быть произвольно задан оператором транспортной системы 10. Например, временной интервал может быть выбран в диапазоне от 0,5 с до 5 с.При определении среднего расхождения рабочих параметров на некотором временном интервале можно усреднить флуктуации, имеющие незначительное влияние на возможный сход каната и благодаря этому избежать ненужных снижений скорости или отключений транспортной системы.
Устройство 76 определения статуса безопасности функционирования может, в частности, также содержать систему обработки данных в виде, например, компьютера, который объединяет функции вычислительного устройства 70, устройства 82 генерирования сигнала статуса безопасности функционирования, а также датчика 92 положения каната. Для ввода данных может быть использовано соответствующее устройство ввода, например, клавиатура. Более того, конфигурация системы обработки данных может обеспечивать выполнение компьютерной программы для выполнения одного из вышеописанных способов контроля положения каната 12, направляемого в роликах 22 блока 18 роликов, или способа, заявленного в соответствующих пунктах формулы изобретения на способ. Компьютерная программа может, в частности, храниться на компьютерном программоносителе и содержать программные средства, пригодные для выполнения одного из описанных выше способов или одного из заявленных в формуле изобретения способов, когда компьютерная программа выполняется в системе обработки данных устройства 48 контроля положения каната. Компьютерный программоноситель может представлять собой, например, носитель данных, например, в виде компакт-диска, дискеты или карты памяти.
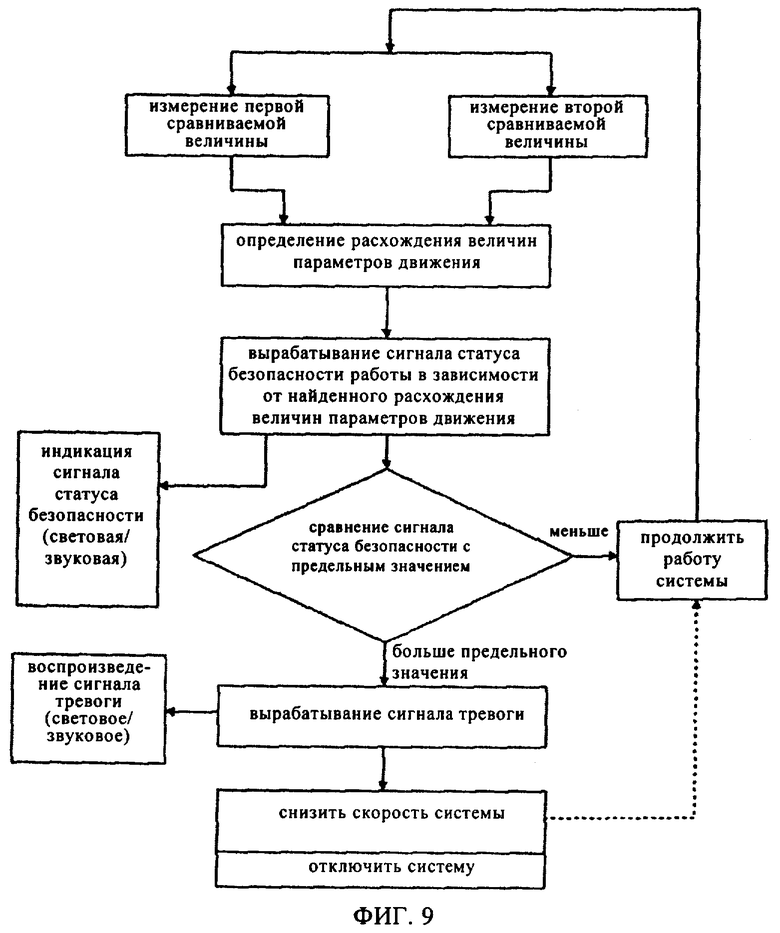
Пример возможной последовательности операций по определению статуса безопасности функционирования схематически изображен на фиг.9.
После пуска транспортной системы 10 посредством датчиков 50 величины параметров движения определяется первая величина параметра движения, например, скорость вращения входного ролика 40 или выходного ролика 42. Далее, посредством датчика 50 величины параметра движения определяется вторая величина параметра движения, например, скорость вращения реперного ролика 46. В предпочтительном варианте первая и вторая величина параметра движения измеряются одновременно. Расхождения величин параметров движения между первой и второй величинами параметров движения определяются посредством вычислительного устройства 70.
На следующем шаге вырабатывается сигнал статуса безопасности функционирования на основе только что найденного расхождения величин параметров движения. В варианте осуществления, посредством индикаторного устройства 84 может выполняться световая и/или звуковая индикация сигнала статуса безопасности функционирования. Это, например, может быть сделано в виде текстового сообщения, показывающего статус безопасности функционирования, например "исправно" или "большая опасность схода каната", которое выводится на монитор. Очевидно, что индикаторное устройство также может воспроизводить сигнал статуса безопасности функционирования в форме столбцовой диаграммы, которая может быть также и цветной. Например, зеленая индикация появляется в случае статуса безопасности функционирования, соответствующему отсутствию нарушений, желтая индикация появляется при наличии минимальной опасности схода каната, а красная индикация соответствует наличию большой опасности схода каната. Сигнал статуса безопасности функционирования вырабатывается с использованием шкалы сравнительной оценки на основе измеренного расхождения величин параметров движения, посредством подходящего процесса распределения.
Для воздействия на работу транспортной системы 10 производится сравнение сигнала статуса безопасности функционирования с заданным заранее предельным значением. Если сигнал статуса безопасности функционирования меньше предельного значения, работа системы продолжается как прежде, то есть первая и вторая величины параметров движения продолжаются измеряться, как указано выше.
Если же при сравнении сигнала статуса безопасности функционирования оказывается, что предельное значение было превышено, тогда, в предпочтительном варианте, вырабатывается сигнал тревоги со световой и/или звуковой индикацией, например, устройством 88 индикации сигнала тревоги. Индикация может, в частности, содержать полное текстовое сообщение, включающее информацию, например, "уменьши скорость", или "отключи приводное устройство", или "отключи систему". В зависимости от степени превышения предельного значения, либо может быть сокращена скорость движения системы, пока сигнал статуса безопасности функционирования не снизится обратно ниже предельного значения, когда система может продолжать работать на первоначально выбранной скорости, либо система может быть немедленно автоматически отключена, чтобы предотвратить сход каната на канатном ролике 22, контроль которого ведется.
Первая величина параметра движения и вторая величина параметра движения необязательно должны быть определены в одном и том же блоке 18 роликов. Возможно использовать только один реперный ролик 46 для всей транспортной системы 10 и вести контроль других канатных роликов 22, и определять величину параметра движения этих других первых канатных роликов посредством датчика 50 величины параметра движения. Поскольку, однако, протягивание каната 12 по блоку 18 роликов не происходит беспрерывно, а из-за провиса на пролете 28 может изменяться с изменением нагрузки, это часто приводит к неоднородности скорости движения каната на разных блоках 18 роликов. Если для контроля канатного ролика 22 выбран реперный ролик 46 в том же блоке 18 роликов, то составляющие скорости, обусловленные флуктуациями величины нагрузки или изменяющимися ускорениями каната, могут быть скомпенсированы с использованием определения расхождения величин параметров движения.
В альтернативном варианте, в качестве датчиков 50 величины параметра движения могут быть использованы инкапсулированные системы измерения дифференциального или абсолютного положений.
Если отдельно измеренные величины параметров движения подаются в вычислительное устройство 70 в посту 72 управления, могут быть выявлены погрешности передачи и измерения путем корреляции отдельно измеренных значений на каждом блоке 18 роликов, либо на различных блоках 18 роликов. Если при этом возникают недопустимые различия, это может свидетельствовать, например, об утере всего устройства 48 контроля положения каната, либо о поломке частей устройства 48 контроля положения каната, либо о сходе каната. В каждом случае безопасная работа транспортной системы 10 может быть гарантирована благодаря избыточности найденных результатов измерений.
В предпочтительном варианте, используются датчики 50 величины параметра движения различных конструкций и способа передачи для того, чтобы избежать появления систематических ошибок в работе устройства 48 контроля положения каната.
Преимуществом описанного здесь устройства 48 контроля положения каната является то, что оно полностью независимо от конструкции каната. Так называемый повив кабеля, или его конструкция, например, вальцованный/невальцованный канат, не влияют на определение статуса безопасности функционирования.
Более того, с использованием устройства 48 контроля положения каната также может автоматически определяться степень износа канатных роликов 22 посредством соответствующих сравнений величин параметров движения на единицу пробега каната 12. Износ внутри блока 18 роликов может быть определен сравнением за короткий интервал времени, в то время как износ канатных роликов 22 в разных блоках 18 роликов может быть определен при сравнении на продолжительном интервале. В частности, посредством вычислительного устройства 70 также возможно проводить взаимное сопоставление величин параметров движения любых заданных канатных роликов 22, контроль которых ведется, и таким путем обнаружить степень износа канатных роликов 22 путем усреднения за определенный временной интервал.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ИЗНОСА, ТРАНСПОРТНАЯ УСТАНОВКА С КАНАТНЫМ ПРИВОДОМ И СПОСОБ КОНТРОЛЯ БЫСТРОИЗНАШИВАЮЩИХСЯ ДЕТАЛЕЙ ТАКОЙ ТРАНСПОРТНОЙ УСТАНОВКИ | 2009 |
|
RU2493989C2 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
| ТРАНСПОРТНАЯ СИСТЕМА ("КАНАТНОЕ МЕТРО") | 2012 |
|
RU2506182C1 |
| Подводная канатная транспортная система | 2024 |
|
RU2840564C1 |
| СИСТЕМА КОНТРОЛЯ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2520725C2 |
| Автоматизированная система управления пассажирской подвесной канатной дорогой | 2024 |
|
RU2822719C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КАНАТНОЙ ТРАНСПОРТНОЙ СИСТЕМОЙ И СИСТЕМА, СОДЕРЖАЩАЯ ТАКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 2021 |
|
RU2831617C1 |
| КАНАТНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2015 |
|
RU2673585C2 |
| СИСТЕМА КАНАТНОЙ ДОРОГИ | 2015 |
|
RU2671930C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ И СИСТЕМА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА ЭКСПЛУАТАЦИИ | 2017 |
|
RU2723573C1 |
Изобретение относится к средствам контроля положения каната и к транспортной системе, содержащей такое средство. Транспортная система содержит по меньшей мере один первый и по меньшей мере один второй канатный ролик, образующий реперный ролик. Для первого канатного ролика определяется первая величина параметра движения. Для реперного ролика определяется вторая величина параметра движения. Производится сравнение первой и второй величин параметров движения для определения взаимного расхождения величин параметров движения между первой и второй величинами параметров движения. Взаимное расхождение упомянутых величин определяет статус безопасности функционирования транспортной системы. В результате упрощается определение угрозы схода каната. 3 н. и 52 з.п. ф-лы, 9 ил.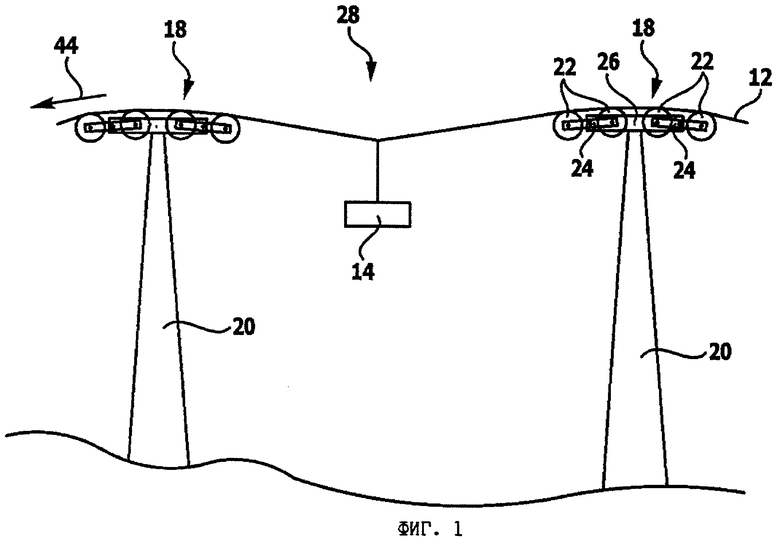
1. Устройство (48) для контроля положения каната (12), направляемого роликами (22) блока (18) роликов, в котором по меньшей мере первый канатный ролик (40, 42) подлежит контролю в блоке (18) роликов транспортной системы (10) с канатным приводом, содержащем по меньшей мере один первый и по меньшей мере один второй канатный ролик (22), образующий реперный ролик (46), отличающееся тем, что оно снабжено датчиком (50) величины параметра движения для определения первой величины параметра движения по меньшей мере одного первого канатного ролика (40, 42) и второй величины параметра движения реперного ролика (46) и вычислительным устройством (70) для сравнения первой и второй величин параметров движения и определения взаимного расхождения величин параметров движения между первой и второй величинами параметров движения, соответствующего статусу безопасности функционирования транспортной системы (10).
2. Устройство по п.1, отличающееся тем, что оно снабжено устройством (76) определения статуса безопасности функционирования для определения статуса безопасности функционирования транспортной системы (10) в зависимости от по меньшей мере одного найденного расхождения величин параметров движения.
3. Устройство по п.1, отличающееся тем, что оно снабжено датчиком (92) положения каната для определения положения каната (12) в по меньшей мере одном канатном ролике (40, 42).
4. Устройство по п.3, отличающееся тем, что датчик (92) положения каната обеспечивает определение отклонения каната (12) в по меньшей мере одном первом канатном ролике (40, 42) от исходного положения, в котором на канат (12) не действуют поперечные силы (Fq), по найденному расхождению величин параметров движения.
5. Устройство по п.3, отличающееся тем, что устройство (76) определения статуса безопасности функционирования обеспечивает установление связи статуса безопасности функционирования транспортной системы (10) с положением каната (12) в по меньшей мере одном первом канатном ролике (40, 42), которое было определено датчиком (92) положения каната.
6. Устройство по любому из пп.1-5, отличающееся тем, что вычислительное устройство (70) обеспечивает определение расхождения величин параметров движения по меньшей мере двух первых канатных роликов (40, 42) посредством сравнения первых величин параметров движения по меньшей мере двух первых канатных роликов (40, 42) и второй величины параметра движения реперного ролика (46).
7. Устройство по любому из пп.1-5, отличающееся тем, что оно снабжено шкалой (80) сравнительной оценки для статуса безопасности функционирования и устройством (82) генерирования сигнала статуса безопасности функционирования для вырабатывания сигнала статуса безопасности функционирования, который соответствует показателю статуса безопасности функционирования по шкале (80) сравнительной оценки, который связан с найденным расхождением величин параметров движения.
8. Устройство по любому из пп.1-5, отличающееся тем, что оно снабжено шкалой (80) для статуса безопасности функционирования и устройством (82) генерирования сигнала статуса безопасности функционирования для вырабатывания сигнала статуса безопасности функционирования, который соответствует показателю статуса безопасности функционирования по шкале (80) сравнительной оценки, связанному с отклонением каната (12) от исходного положения в по меньшей мере одном первом канатном ролике (40, 42).
9. Устройство по п.7, отличающееся тем, что устройство (82) генерирования статуса безопасности функционирования обеспечивает обработку найденных расхождений величин параметров движения от по меньшей мере двух первых канатных роликов (40, 42) для вырабатывания сигнала статуса безопасности функционирования.
10. Устройство по п.7, отличающееся тем, что устройство (82) генерирования сигнала статуса безопасности функционирования содержит узел определения максимального значения, посредством которого определяется максимальное значение по меньшей мере двух расхождений величин параметров движения.
11. Устройство по п.7, отличающееся тем, что оно снабжено световым и/или звуковым индикаторным устройством (84) для воспроизведения сигнала статуса безопасности функционирования.
12. Устройство по п.7, отличающееся тем, что оно снабжено устройством (86) аварийной сигнализации для вырабатывания сигнала тревоги и/или сигнала отключения при превышении сигналом статуса безопасности функционирования заданного предельного значения.
13. Устройство по п.12, отличающееся тем, что оно снабжено устройством (88) индикации светового и/или звукового сигнала тревоги для индикации сигнала тревоги и/или отключения.
14. Устройство по п.12, отличающееся тем, что устройство (86) аварийной сигнализации взаимодействует с устройством (90) управления и/или регулирования приводного устройства (16) транспортной системы (10), и его конфигурация обеспечивает снижение скорости движения транспортной системы (10) и/или возможность отключения приводного устройства (16) транспортной системы (10) при вырабатывании сигнала тревоги и/или отключения.
15. Устройство по любому из пп.1-5, отличающееся тем, что датчик (50) величины параметра движения обеспечивает одновременное определение первой и второй величин параметров движения.
16. Устройство по любому из пп.1-5, отличающееся тем, что датчик (50) величины параметра движения обеспечивает определение первой и второй величин параметров движения как функций времени, и вычислительное устройство (70) обеспечивает определение среднего на заданном временном интервале расхождения первой величины параметра движения от второй величины параметра движения.
17. Устройство по любому из пп.1-5, отличающееся тем, что датчик (50) величины параметра движения обеспечивает определение первой и/или второй величин параметров движения бесконтактным способом.
18. Устройство по любому из пп.1-5, отличающееся тем, что датчик (50) величины параметра движения выполнен в виде датчика (50) скорости вращения или угловой скорости.
19. Устройство по п.18, отличающееся тем, что датчик (50) скорости вращения или угловой скорости содержит элемент (52), вырабатывающий тактовые импульсы, который может быть соединен без возможности взаимного вращения с канатным роликом (22), величина параметра движения которого должна быть определена, и по меньшей мере один чувствительный элемент (54) для определения вращения элемента (52), вырабатывающего тактовые импульсы.
20. Устройство по п.19, отличающееся тем, что элемент (52), вырабатывающий тактовые импульсы, выполнен в виде кодового диска (56), имеющего большое количество тактирующих элементов (58), расположенных с равными интервалами по окружности кодового диска (56).
21. Устройство по п.20, отличающееся тем, что тактирующие элементы (58) выполнены в виде выступающих по радиусу или вдоль оси выступов (58), образующих периодическую зубчатую структуру (60).
22. Устройство по п.19, отличающееся тем, что элемент (52), вырабатывающий тактовые импульсы, выполнен по меньшей мере частично из металла.
23. Устройство по п.19, отличающееся тем, что элемент (52), вырабатывающий тактовые импульсы, имеет противообледенительный слой (66).
24. Устройство по п.23, отличающееся тем, что противообледенительный слой (66) выполнен из синтетического материала.
25. Устройство по п.19, отличающееся тем, что чувствительный элемент (54) представляет собой индуктивный или емкостной бесконтактный чувствительный элемент (54).
26. Устройство по любому из пп.1-5, отличающееся тем, что датчик (50) величины параметра движения обеспечивает возможность определения величины параметра движения входного ролика (40) и/или выходного ролика (42) блока (18) роликов, которые образуют по меньшей мере один первый канатный ролик (40, 42).
27. Устройство по любому из пп.1-5, отличающееся тем, что датчик (50) величины параметра движения обеспечивает возможность определения величины параметра движения внутреннего канатного ролика (22), расположенного между соседними канатными роликами (22) и образующего реперный ролик (46).
28. Транспортная система (10) с канатным приводом, содержащая канат (12), приводное устройство (16) для перемещения каната (12) и по меньшей мере один блок (18) роликов для направления каната (12), в которой по меньшей мере один блок (18) роликов включает по меньшей мере один первый канатный ролик (40, 42) и по меньшей мере один второй канатный ролик (22), образующий реперный ролик (46), и в которой дополнительно используется устройство (48) контроля по меньшей мере положения каната (12), направляемого по меньшей мере одним первым канатным роликом (40, 42), отличающаяся тем, что она снабжена датчиком (50) величины параметра движения для определения первой величины параметра движения по меньшей мере одного первого канатного ролика (40, 42) и второй величины параметра движения реперного ролика (46), вычислительным устройством (70) для сравнения первой и второй величин параметров движения и определения взаимного расхождения величин параметров движения между первой и второй величинами параметров движения, которое соответствует статусу безопасности функционирования транспортной системы (10).
29. Транспортная система по п.28, отличающаяся тем, что устройство (48) контроля положения каната представляет собой устройство (48) по п.2.
30. Транспортная система по п.28 или 29, отличающаяся тем, что канат (12) представляет собой несущий, тяговый и/или подъемный канат.
31. Транспортная система по п.28 или 29, отличающаяся тем, что используются несколько блоков (18) роликов, и устройство (48) контроля положения каната соответственно связано с по меньшей мере двумя из блоков (18) роликов, либо используется общее такое устройство.
32. Способ контроля положения каната, направляемого роликами блока роликов, имеющего по меньшей мере один первый канатный ролик, который должен подвергаться контролю в блоке роликов транспортной системы с канатным приводом, содержащем по меньшей мере один первый и по меньшей мере один второй канатный ролик, образующий реперный ролик, отличающийся тем, что определяют первую величину параметра движения по меньшей мере первого канатного ролика и вторую величину параметра движения реперного ролика, сравнивают первую величину параметра движения по меньшей мере одного первого канатного ролика и вторую величину параметра движения реперного ролика и определяют взаимное расхождение величин параметров движения между первой и второй величинами параметров движения, соответствующее статусу безопасности функционирования транспортной системы.
33. Способ по п.32, отличающийся тем, что положение каната в по меньшей мере одном первом канатном ролике определяется из найденного расхождения величин параметров движения, а статус безопасности функционирования транспортной системы связан с положением каната в по меньшей мере одном первом канатном ролике.
34. Способ по п.32, отличающийся тем, что отклонение каната в по меньшей мере одном первом канатном ролике от исходного положения, когда на канат не действуют никакие поперечные силы, определяют по найденному расхождению величин параметров движения.
35. Способ по п.32, отличающийся тем, что расхождение величин параметров движения для по меньшей мере двух первых канатных роликов определяется сравнением первой величины параметра движения по меньшей мере двух первых канатных роликов и второй величины параметра движения реперного ролика.
36. Способ по п.35, отличающийся тем, что расхождение величин параметров движения сопоставляется со шкалой сравнительной оценки для статуса безопасности функционирования и вырабатывается сигнал статуса безопасности функционирования, соответствующий расхождению величин параметров движения, причем этот сигнал соответствует назначенному показателю безопасности функционирования по шкале сравнительной оценки.
37. Способ по п.35, отличающийся тем, что отклонение каната в по меньшей мере одном первом канатном ролике от исходного положения сопоставляется со шкалой сравнительной оценки для статуса безопасности функционирования, и вырабатывается сигнал статуса безопасности функционирования, соответствующий расхождению величин параметров движения, причем этот сигнал соответствует назначенному показателю безопасности функционирования по шкале сравнительной оценки.
38. Способ по п.36, отличающийся тем, что найденные расхождения величин параметров движения от по меньшей мере двух первых канатных роликов обрабатываются в ходе вырабатывания сигнала статуса безопасности функционирования.
39. Способ по п.38, отличающийся тем, что значение сигнала статуса безопасности функционирования соответствует большему из расхождений величин параметров движения, определенных для по меньшей мере двух первых канатных роликов путем сравнения первой величины параметра движения по меньшей мере двух первых канатных роликов и второй величины параметра движения реперного ролика.
40. Способ по п.36, отличающийся тем, что сигнал статуса безопасности функционирования воспроизводится световыми и/или звуковыми средствами.
41. Способ по п.36, отличающийся тем, что сигнал тревоги и/или отключения вырабатывается, если величина сигнала статуса безопасности функционирования превосходит предельное значение.
42. Способ по п.41, отличающийся тем, что сигнал тревоги и/или отключения воспроизводится световыми и/или звуковыми средствами.
43. Способ по п.41, отличающийся тем, что снижают скорость движения транспортной системы, либо отключают приводное устройство транспортной системы, либо выключают транспортную систему на основании сигнала тревоги или отключения.
44. Способ по любому пп.32-43, отличающийся тем, что первая и вторая величины параметров движения определяются одновременно.
45. Способ по любому из пп.32-43, отличающийся тем, что первая и вторая величины параметров движения определяются как функции времени, и среднее расхождение величин параметров движения - первой величины параметра движения от второй величины параметра движения определяется на заданном временном интервале.
46. Способ по любому из пп.32-43, отличающийся тем, что первая и/или вторая величины параметров движения определяются бесконтактными средствами.
47. Способ по любому из пп.32-43, отличающийся тем, что первая и/или вторая величины параметров движения определяются в форме скорости вращения по меньшей мере одного первого канатного ролика и/или реперного ролика.
48. Способ по любому из пп.32-43, отличающийся тем, что первая и/или вторая величины параметров движения определяются в форме угловой скорости по меньшей мере одного первого канатного ролика и/или реперного ролика.
49. Способ по любому из пп.32-43, отличающийся тем, что первую и/или вторую величины параметров движения определяют с использованием датчика скорости вращения или угловой скорости.
50. Способ по любому из пп.32-43, отличающийся тем, что входной ролик и/или выходной ролик блока роликов, образующие концевые канатные ролики блока роликов, выбирают в качестве по меньшей мере одного первого канатного ролика.
51. Способ по любому из пп.32-43, отличающийся тем, что канатный ролик, образующий внутренний канатный ролик, расположенный между двумя соседними канатными роликами, выбирают в качестве реперного ролика.
52. Способ по любому из пп.32-43, отличающийся тем, что он используется в транспортной системе, представляющей собой подвесную канатную дорогу.
53. Способ по любому из пп.32-43, отличающийся тем, что он используется для контроля положения несущего, тягового и/или подъемного каната транспортной системы.
54. Способ по любому из пп.32-43, отличающийся тем, что он используется в отношении канатных роликов, содержащих по окружности направляющие пазы для каната.
55. Способ по п.54, отличающийся тем, что он используется в отношении канатного ролика, у которого поперечное сечение направляющего паза для каната имеет форму дуги круга.
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
| Способ и аппарат для изготовления плит | 1930 |
|
SU24823A1 |
| US 6356202 В1, 12.03.2002 | |||
| US 5581180 А, 03.12.1996. | |||

