Изобретение относится к радиолокационной технике, а именно к измерителям дальности при сопровождении цели по углам бортовыми комплексами перехвата.
Данное изобретение предназначено для определения дальности до сопровождаемого по углам помехопостановщика активных шумовых помех, которые делают невозможным определение дальности радиолокационными методами.
Известны аналогичные решения той же задачи (см. Богуславский И.А. Методы навигации и управления по неполной статистической информации.- M.: Mашиностроение, 1970, с. 165-170; патент США N 3378842, кл. 343-112 (1968), Метод и устройство для определения местоположения источника).
Устройство определения дальности до сопровождаемой по углам цели предназначено для определения дальности до сопровождаемой по углам маневрирующей в горизонтальной плоскости цели. Известные аналогичные решения той же задачи приведены выше. Наиболее близким по своей технической сущности к предлагаемому изобретению является устройство по патенту США N 3378842 кл. 343-112 (1968 г.) "Метод и устройство для определения местоположения источника".
Известное устройство содержит делитель, а также блок вычисления проекции скорости самолета на линию, перпендикулярную линии визирования и угловой скорости линии визирования, выходы которого соединены с делителем. Дальность до источника определяется по формуле
где Vи - скорость истребителя;
ϕ - угол пеленга источника; - производная угла пеленга.
- производная угла пеленга.
Приведенное соотношение для определения дальности справедливо при постоянстве координат источника (Xe; Ye), т.е. при неподвижном в пространстве источнике 
Учитывая, что при отсутствии маневра истребителя  , получим
, получим
Для примера рассмотрим движение источника в горизонтальной плоскости  со скоростью, близкой к скорости истребителя. При движении источника навстречу самолету из соотношения (1) получим
со скоростью, близкой к скорости истребителя. При движении источника навстречу самолету из соотношения (1) получим
Подставляя полученное соотношение в (2), получим  При движении источника по направлению движения истребителя (в заданную полусферу) будем иметь
При движении источника по направлению движения истребителя (в заданную полусферу) будем иметь
при q = ϕ и 
что приведет к неограниченному росту ошибки определения дальности.
Таким образом, известное устройство не может быть использовано для определения Д до маневрирующей и движущейся цели.
Целью данного изобретения является устранение указанного недостатка, а именно повышение точности определения дальности до сопровождаемой по углам маневрирующей в горизонтальной плоскости цели.
Поставленная цель достигается тем, что в устройство для определения дальности до сопровождаемой по углам цели, содержащее делитель, введены пороговое устройство и блок вычисления проекции скорости истребителя на вертикаль и проекции угловой скорости линии визирования, выходы которого соединены со входами делителя, а его выход через контакт порогового устройства является выходом устройства. На фиг. 1 представлена структурная схема устройства определения дальности.
Устройство определения дальности сопровождаемой по углам цели, маневрирующей в горизонтальной плоскости (фиг. 1), содержит пороговое устройство 1, делитель 2, а также блок вычисления проекции скорости истребителя на вертикаль и проекции угловой скорости линии визирования 3, выходы которого соединены со входами делителя, а выход делителя через контакт порогового устройства является выходом устройства.
На входы блока 3 подаются сигналы скорости истребителя (Vи), угла атаки (α) и тангажа (v), а также угла между линией визирования и горизонтальной плоскостью (εв) и его производной  . Блок 3 ычисляет проекцию скорости истребителя на вертикаль (Vиy) по формуле Vиу= Vиsin(v-α) и проекцию угловой скорости линии визирования (ωп) по формуле
. Блок 3 ычисляет проекцию скорости истребителя на вертикаль (Vиy) по формуле Vиу= Vиsin(v-α) и проекцию угловой скорости линии визирования (ωп) по формуле
Сигналы с выхода блока 3 подаются на входы делителя 2, в котором производится вычисление дальности по формуле 
На вход порогового устройства 1 поступает сигнал угла (εв) и оно срабатывает при значении входного сигнала, не превосходящего выбранного порога. Сигнал дальности с выхода устройства деления 2 через контакт порогового устройства поступает на выход устройства.
Ошибка определения дальности до маневрирующей в горизонтальной плоскости сопровождаемой по углам цели уменьшается с уменьшением угла εв. Введение в устройство блока 3 вычисления проекции скорости истребителя на вертикаль и проекции угловой скорости линии визирования (ωп), а также порогового устройства 1 позволяет повысить точность определения дальности до маневрирующей в горизонтальной плоскости сопровождаемой по углам цели. Вычисление проекции скорости истребителя на вертикаль может быть также произведено путем интегрирования сигнала вертикальной составляющей ускорения истребителя или путем дифференцирования сигнала, высоты полета истребителя. Проекция  может быть вычислена при измерении проекций угловой скорости линии визирования ωг и ωв на оси (OYa, OZa), ортогональные линии визирования, и пеленгов цели (ϕг,ϕв) по формуле
может быть вычислена при измерении проекций угловой скорости линии визирования ωг и ωв на оси (OYa, OZa), ортогональные линии визирования, и пеленгов цели (ϕг,ϕв) по формуле
где v - тангаж;
γ - угол крена;
μ - угол установки антенны.
Для проведения успешной атаки постановщика активных шумовых помех с помощью управляемого ракетного вооружения кроме информации о дальности необходима информация об относительном движении постановщика помех (вида полусферы).
Устройство для определения вида полусферы предназначено для определения относительного направления движения сопровождаемого по углам помехопостановщика активных шумовых помех.
Из известных наиболее близким по технической сущности к предлагаемому устройству является устройство, используемое в серийной БРЛС РП-23, описание которого дано в ВА1.005.027 РЭ, часть 9. Известное устройство определения вида полусферы содержит устройство сравнения, на входы которого поступают сигналы проекции скорости истребителя на линию визирования (Vих) и скорости сближения с целью 
Если сигнал скорости сближения по модулю больше сигнала Vих то устройство сравнения формирует сигнал передней полусферы (ППС), в противном случае
то устройство сравнения формирует сигнал передней полусферы (ППС), в противном случае  формируется сигнал задней полусферы (ЗПС). Известное устройство определяет вид полусферы, если известны значения скорости сближения с целью. Методическую ошибку скорости сближения, определяемой по дальности устройством по п. 2, найдем как
формируется сигнал задней полусферы (ЗПС). Известное устройство определяет вид полусферы, если известны значения скорости сближения с целью. Методическую ошибку скорости сближения, определяемой по дальности устройством по п. 2, найдем как
где Дист,  - истинные значения дальности и скорости сближения.
- истинные значения дальности и скорости сближения.
Из соотношений (3) и (4) для равных высот полета истребителя и цели с учетом того, что
получим
Выражения (3) и (4) показывают, что методическая ошибка определения скорости сближения
путем диференцирования дальности, определяемой устройством по п. 2, зависит от угла (εв) между линией визирования и горизонтальной плоскостью и на равных высотах, где εв= 0 составляет  поэтому известное устройство для определения полусферы использовано быть не может.
поэтому известное устройство для определения полусферы использовано быть не может.
Целью изобретения является определение относительного направления движения маневрирующей в горизонтальной плоскости сопровождаемой по углам цели.
Поставленная цель достигается тем, что в устройство по п. 2 введены αβ-фильтр, устройство сравнения, усилитель и таймер, выход αβ-фильтра и усилителя соединения со входом устройства сравнения, выход которого через контакт таймера является выходом устройства определения полусферы.
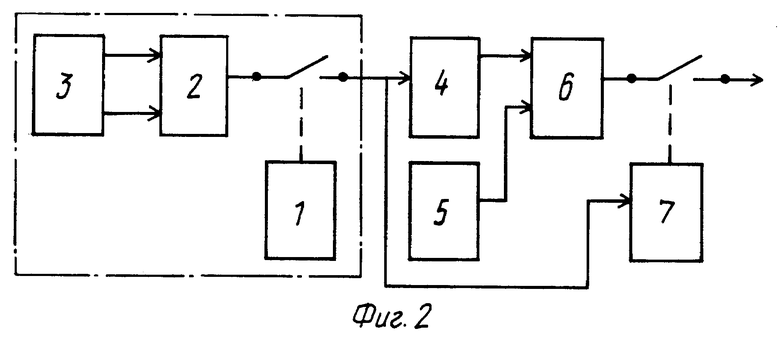
Блок-схема устройства показана на фиг. 2.
Устройство определения полусферы до маневрирующей в горизонтальной плоскости сопровождаемой по углам цели содержит αβ-фильтр 4, устройство сравнения 5, усилитель 6, таймер 7, устройство по п. 2, выход которого соединен со входом αβ-фильтра и таймера, выход которого и выход усилителя 6 соединены со входами устройства сравнения 5, а его выход через контакт таймера 7 является выходом устройства.
На входы αβ-фильтра 4 и таймера 7 подаются сигналы дальности (Д) с выхода устройства по п. 2. αβ-фильтр вычисляет производную сигнала дальности  . Сигнал производной
. Сигнал производной  с выхода αβ-фильтра поступает на вход устройства сравнения 5, на второй вход которого поступает сигнал с выхода усилителя 6, на вход которого поступает сигнал проекции скорости истребителя на линию визирования. Усилитель 6 усиливает сигнал (Vих) с коэффициентом усиления 1,5-2,5 (конкретное значение которого выбирается в процессе настройки устройства и зависит от значения выбранного порога порогового устройства 1). Устройство сравнения производит сравнение сигнала скорости сближения
с выхода αβ-фильтра поступает на вход устройства сравнения 5, на второй вход которого поступает сигнал с выхода усилителя 6, на вход которого поступает сигнал проекции скорости истребителя на линию визирования. Усилитель 6 усиливает сигнал (Vих) с коэффициентом усиления 1,5-2,5 (конкретное значение которого выбирается в процессе настройки устройства и зависит от значения выбранного порога порогового устройства 1). Устройство сравнения производит сравнение сигнала скорости сближения  и усиленного сигнала проекции скорости истребителя на линию визирования (1,5-2,5 Vих). Если сигнал скорости сближения по модулю больше сигнала (1,5-2,5 Vих), то формируется сигнал передней полусферы (ППС), в противном случае формируется сигнал задней полусферы (ЗПС). Сигнал с выхода устройства по п. 2 запускает таймер 7, который предназначен для формирования момента времени определения вида полусферы на выходе устройства сравнения 5. Время, через которое срабатывает таймер, определяется временем переходного процесса вычисления производной в αβ-фильтре и составляет 5-10 с.
и усиленного сигнала проекции скорости истребителя на линию визирования (1,5-2,5 Vих). Если сигнал скорости сближения по модулю больше сигнала (1,5-2,5 Vих), то формируется сигнал передней полусферы (ППС), в противном случае формируется сигнал задней полусферы (ЗПС). Сигнал с выхода устройства по п. 2 запускает таймер 7, который предназначен для формирования момента времени определения вида полусферы на выходе устройства сравнения 5. Время, через которое срабатывает таймер, определяется временем переходного процесса вычисления производной в αβ-фильтре и составляет 5-10 с.
Использование устройства для определения дальности, а также введение в устройство усилителя 6, таймера 7 и связи между выходом устройства для определения дальности и входом таймера позволяет определить вид полусферы маневрирующей в горизонтальной плоскости сопровождаемой по углам цели. Таким образом, показано, что предлагаемое устройство обеспечиваeт достижение поставленной цели, а именно повышение точности определения дальности и вида полусферы маневрирующей в горизонтальной плоскости сопровождаемой по углам цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СОПРОВОЖДАЕМОЙ ПО УГЛАМ ЦЕЛИ И СКОРОСТИ СБЛИЖЕНИЯ С НЕЙ | 1989 |
|
RU2144201C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| СПОСОБ РАНЖИРОВАНИЯ ЦЕЛЕЙ | 2000 |
|
RU2190863C2 |
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ИНТЕНСИВНО МАНЕВРИРУЮЩУЮ ВОЗДУШНУЮ ЦЕЛЬ | 2004 |
|
RU2254542C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТИ И УГЛОВЫХ КООРДИНАТ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2251711C1 |
| СПОСОБ ПЕРЕХВАТА ВОЗДУШНЫХ ЦЕЛЕЙ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2012 |
|
RU2498342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И СКОРОСТИ СБЛИЖЕНИЯ С НИМИ В ОДНОПОЗИЦИОННЫХ РАДИОЛОКАЦИОННЫХ СИСТЕМАХ | 2002 |
|
RU2232402C2 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
Изобретение относится к радиолокации. Устройство содержит блок сравнения, линию задержки, блок вычисления проекции скорости истребителя на линию визирования, блок определения скорости сближения с целью, датчики скорости, угла атаки и тангажа, систему углового сопровождения. Технический результат - повышение точности определения дальности до сопровождаемой по углам маневрирующей в горизонтальной плоскости цели. 1 з.п.ф-лы, 2 ил.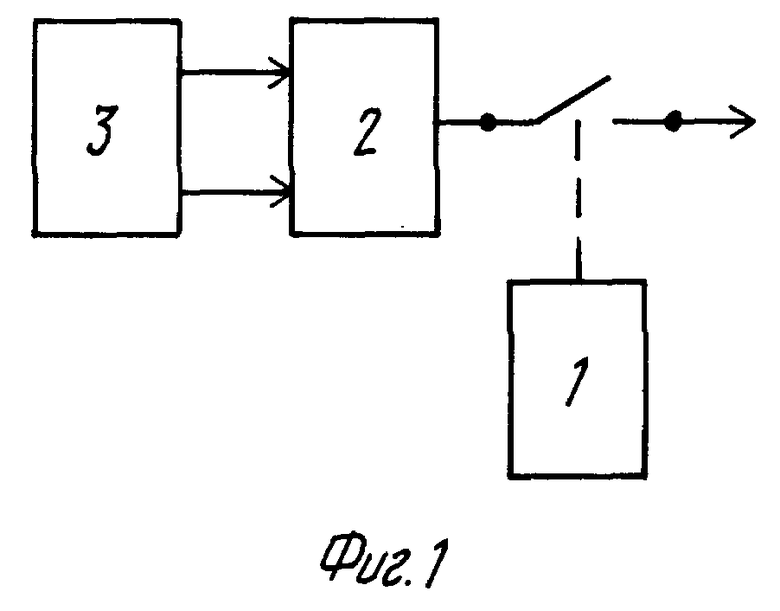
 а также порогового устройства, вход которого соединен с системой углового сопровождения по каналу угла между линией визирования и горизонтальной плоскостью, а выход - с управляющим входом первого ключа, причем выход фильтр соединен с блоком сравнения, выход первого управляемого ключа через линию задержки соединен с управляющим входом второго вновь введенного в состав устройства управляемого ключа, сигнальный вход которого соединен с выходом блока сравнения.
а также порогового устройства, вход которого соединен с системой углового сопровождения по каналу угла между линией визирования и горизонтальной плоскостью, а выход - с управляющим входом первого ключа, причем выход фильтр соединен с блоком сравнения, выход первого управляемого ключа через линию задержки соединен с управляющим входом второго вновь введенного в состав устройства управляемого ключа, сигнальный вход которого соединен с выходом блока сравнения.
| Патент США N 3378842, Н.кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
