Изобретение относится к радиолокационной технике, а именно к измерителям дальности при сопровождении цели по углам бортовыми комплексами перехвата. Данное изобретение предназначено для определения дальности и скорости сближения с помехопостановщиком активных шумовых помех, которые делают невозможным определение этих параметров радиолокационными методами.
Известны аналогичные решения той же задачи [см. патент США N 3982246, кл. 343-112 (1976), "General method of geometrical passive ranging"].
Известные технические решения предназначены для определения дальности и скорости сближения с использованием кинематических соотношений, связывающих относительное движение истребителя и неманеврирующей цели.
Определение дальности и скорости сближения возможно лишь при маневрировании истребителя, т.к. без маневрирования координата дальности не наблюдаема.
При слежении за помехопостановщиком измеряются угловые координаты цели и угловые скорости вращения линии визирования, собственная скорость истребителя. В настоящее время станции помех устанавливаются не только на тяжелых истребителях прикрытия массированных налетов, но и являются индивидуальными средствами защиты маневренных истребителей. Причем вертикальный маневр используется целью в ближних воздушных боях или как средство ухода от ракеты угрожающей безопасности цели. На дальних ракетных боях используется в основном маневр "отворот" или "змейка" в горизонтальной плоскости.
Известные решения обладают тем недостатком, что при маневрировании цели ошибки определения дальности и скорости сближения неограниченно или недопустимо возрастают.
Наиболее близким по технической сущности решением предлагаемому устройству является устройство по авторскому свидетельству N 275312 от 05.02.88 (М. кл G 01 S 13/08 "Устройство для определения вида полусферы атакуемой цели и дальности до нее").
Известное устройство по а.с. N 275312 содержит датчики скорости, угла атаки и угла тангажа, систему углового сопровождения, пороговое устройство, αβ-фильтр, делитель, блок вычисления проекции скорости истребителя на вертикаль и проекции угловой скорости линии визирования, выходы которого соединены со входами делителя, а выход делителя через контакт порогового устройства соединен со входом αβ-фильтра. На входы блока вычислителя проекций подаются сигналы скорости истребителя (Vu) угла атаки (α) и тангажа (ϑ), а также угла между линией визирования и горизонтальной плоскостью (εв) и его производной  c выходов системы углового сопровождения. Вычисление проекции скорости истребителя на вертикаль производится по формуле vиу= vи•sin(ϑ-α), вычисление проекции угловой скорости по формуле
c выходов системы углового сопровождения. Вычисление проекции скорости истребителя на вертикаль производится по формуле vиу= vи•sin(ϑ-α), вычисление проекции угловой скорости по формуле  В делителе производится вычисление дальности по формуле
В делителе производится вычисление дальности по формуле
D = vиу/ωn. (1)
Известна кинематическая связь проекции скорости истребителя (Vuy), дальности (Д) и скорости сближения 

Соотношения (1) и (2) позволяют получить выражения для определения ошибок оценки дальности и скорости сближения устройством прототипа
Из соотношений (3) и (4) видно, что ошибки  зависят от угла наклона (εв) и при εв = 0 ошибка по скорости сближения равна значению скорости сближения, а ошибки по дальности при εв = 4-8o составляют 3,5-8 км (Vuy) = 100 м/с, Д = 50 км, Д < 100 м/с).
зависят от угла наклона (εв) и при εв = 0 ошибка по скорости сближения равна значению скорости сближения, а ошибки по дальности при εв = 4-8o составляют 3,5-8 км (Vuy) = 100 м/с, Д = 50 км, Д < 100 м/с).
Таким образом, видно, что недостатком прототипа являются большие ошибки определения дальности и скорости сближения.
При наличии таких ошибок по скорости сближения возможно определение только вида полусферы, но не значения скорости сближения.
Целью предлагаемого решения является повышение точности определения дальности и скорости сближения при сопровождении по углам маневрирующей в горизонтальной плоскости цели.
Поставленная цель достигается тем, что в устройстве для определения дальности до сопровождаемой по углам цели и скорости сближения с ней, содержащем датчик скорости, датчик угла атаки, датчик угла тангажа, систему углового сопровождения, блок определения скорости сближения с целью, который выполнен в виде последовательно соединенных устройств вычисления дальности до цели, содержащего два инвертора, два блока умножения, сумматор, блок синуса, блок косинуса и блок деления, причем первый вход первого блока умножения соединен с датчиком скорости, а второй вход - через последовательно соединенные инвертор, сумматор, второй вход которого соединен с датчиком угла тангажа, и блок синуса - с датчиком угла атаки, первый вход второго блока умножения соединен через инвертор с системой углового сопровождения по каналу производной угла между линией визирования и горизонтальной плоскостью, второй вход - через блок косинуса - с системой углового сопровождения по каналу угла между линией визирования и горизонтальной плоскостью, а выходы первого и второго блоков умножения соединены с первым и вторым входами блока деления, а также фильтра вида
первый вход блока деления через вновь введенные последовательно соединенные второй сумматор, третий блок умножения и второй блок синуса соединен с системой углового сопровождения по каналу угла между линией визирования и горизонтальной плоскостью, а вторые входы второго сумматора и третьего блока умножения соединены с выходом первого блока умножения и выходом фильтра вида но каналу скорости сближения, который совместно с выходом фильтра вида по каналу дальности является выходами устройства. Т.к. решений со сходными признаками не обнаружено, следовательно, предлагаемое изобретение отвечает критерию "существенные отличия".
На чертеже представлена блок-схема устройства для определения дальности до сопровождаемой по углам цели и скорости сближения с ней.
Устройство содержит датчики скорости (1), угла атаки (2), угла тангажа (3), систему углового сопровождения (4), которая имеет выход (а) по углу наклона (εв) линии визирования к горизонтальной плоскости и выход (6) по производной  угла наклона линии визирования, первый инвертор (5), второй инвертор (6), первый блок умножения (7), второй блок умножения (8), третий блок умножения (9), первый сумматор (10), второй сумматор (11), первый блок синуса (12), второй блок синуса (13), блок косинуса (14), блок деления (15), фильтр вида (16), на вход которого поступает сигнал с выхода делителя (15). Выходы фильтра вида (16) по каналу (в) скорости сближения и по каналу дальности (г) являются выходами устройства.
угла наклона линии визирования, первый инвертор (5), второй инвертор (6), первый блок умножения (7), второй блок умножения (8), третий блок умножения (9), первый сумматор (10), второй сумматор (11), первый блок синуса (12), второй блок синуса (13), блок косинуса (14), блок деления (15), фильтр вида (16), на вход которого поступает сигнал с выхода делителя (15). Выходы фильтра вида (16) по каналу (в) скорости сближения и по каналу дальности (г) являются выходами устройства.
На первый вход второго блока умножения (8) поступает сигнал с датчика скорости (1), а на второй вход через последовательно соединенные второй инвертор (6), первый сумматор (10), на второй вход которого поступает сигнал с датчика угла тангажа (3), и первый блок синуса (12) поступает сигнал с датчика угла атаки (2). На первый вход первого блока умножения (7) через первый инвертор (5) поступает сигнал от системы углового сопровождения (4) по каналу (6) производной угла наклона линии визирования к горизонтальной плоскости, а на второй вход блока (7) через блок косинуса (14) поступает сигнал с системы углового сопровождения (4) по каналу (а) угла наклона линии визирования к горизонтальной плоскости. Сигнал с выхода второго блока умножения (8) поступает на первый вход второго сумматора (11), на второй вход которого через последовательно соединенные второй блок синуса (13), третий блок умножения (9), на второй вход которого подается сигнал с выхода фильтра вида (16) по каналу скорости сближения, подается сигнал системы углового сопровождения (4) по каналу (а) угла наклона линии визирования к горизонтальной плоскости. Во втором сумматоре (11) происходит сложение выходного сигнала третьего блока умножения (9), равного произведению скорости сближения  и синуса угла наклона линии визирования к горизонтальной плоскости (sin(εв)) и выходного сигнала второго блока умножения (8), равного проекции скорости на вертикаль vиу= vиsin(ϑ-α).
и синуса угла наклона линии визирования к горизонтальной плоскости (sin(εв)) и выходного сигнала второго блока умножения (8), равного проекции скорости на вертикаль vиу= vиsin(ϑ-α).
На выходе второго сумматора (11) образуется сигнал, который в соответствии с соотношением (2) пропорционален произведению дальности (Д) и проекции угловой скорости
то есть 
Сигналы с выхода второго сумматора (11) и выхода первого блока умножения (7) поступают на первый и второй входы делителя (15) соответственно, на выходе которого образуется сигнал, равный дальности. Использование сигнала проекции скорости сближения на вертикальную ось  , образующегося на выходе первого блока умножения (7), при определении дальности, на выходе делителя (15) позволяет повысить точность определении дальности и скорости сближения с маневрирующей в горизонтальной плоскости целью предлагаемым устройством.
, образующегося на выходе первого блока умножения (7), при определении дальности, на выходе делителя (15) позволяет повысить точность определении дальности и скорости сближения с маневрирующей в горизонтальной плоскости целью предлагаемым устройством.
Все блоки устройства выполнены на элементной базе серии 140 УД9.
Технико-экономический эффект в сравнении с прототипом обусловлен использованием новых элементов - второго блока синуса (13), третьего блока умножения (9), второго сумматора (11), а также связей между выходом фильтра вида (16) и входом третьего блока умножения (9), выходом второго блока синуса (13), вход которого связан с системой углового сопровождения (4) по каналу (а) угла наклона линии визирования и горизонтальной плоскости и вторым входом третьего блока умножения (9), выход которого связан со вторым входом второго сумматора (11), что выгодно отличает предлагаемое устройство от указанного прототипа.
Использование сигнала проекции скорости сближения на вертикальную ось  , образующегося на выходе первого блока умножения (7), при определении дальности на выходе делителя (15) позволяет снизить ошибки определения дальности и скорости сближения с целью.
, образующегося на выходе первого блока умножения (7), при определении дальности на выходе делителя (15) позволяет снизить ошибки определения дальности и скорости сближения с целью.
Таким образом, предлагаемое устройство обеспечивает достижение поставленной цели, а именно повышение точности определения дальности до маневрирующей в горизонтальной плоскости, сопровождаемой по углам цели и скорости сближения с ней.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВИДА ПОЛУСФЕРЫ АТАКУЕМОЙ ЦЕЛИ И ДАЛЬНОСТИ ДО НЕЕ | 1985 |
|
RU2145425C1 |
| СИСТЕМА СЛЕЖЕНИЯ ПО УГЛУ МЕСТА | 1994 |
|
RU2083997C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| СПОСОБ РАНЖИРОВАНИЯ ЦЕЛЕЙ | 2000 |
|
RU2190863C2 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| ДАЛЬНОМЕР ПРИ ВОЗДЕЙСТВИИ ПОМЕХИ, УВОДЯЩЕЙ ПО ДАЛЬНОСТИ | 1997 |
|
RU2119174C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАЗЕМНЫХ ПРЕПЯТСТВИЙ ПРИ ПОЛЕТЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА МАЛОЙ ВЫСОТЕ | 1997 |
|
RU2128846C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТИ И УГЛОВЫХ КООРДИНАТ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2251711C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ДВУХ ЦЕЛЕЙ | 1992 |
|
RU2074405C1 |
Изобретение относится к радиолокации. Устройство содержит датчики скорости, угла атаки и угла тангажа, систему углового сопровождения, два инвертора, три блока умножения, два сумматора, два блока синуса, блок косинуса, делитель и фильтр. Технический результат заключается в повышении точности определения дальности до маневрирующей в горизонтальной плоскости сопровождаемой цели. 1 ил.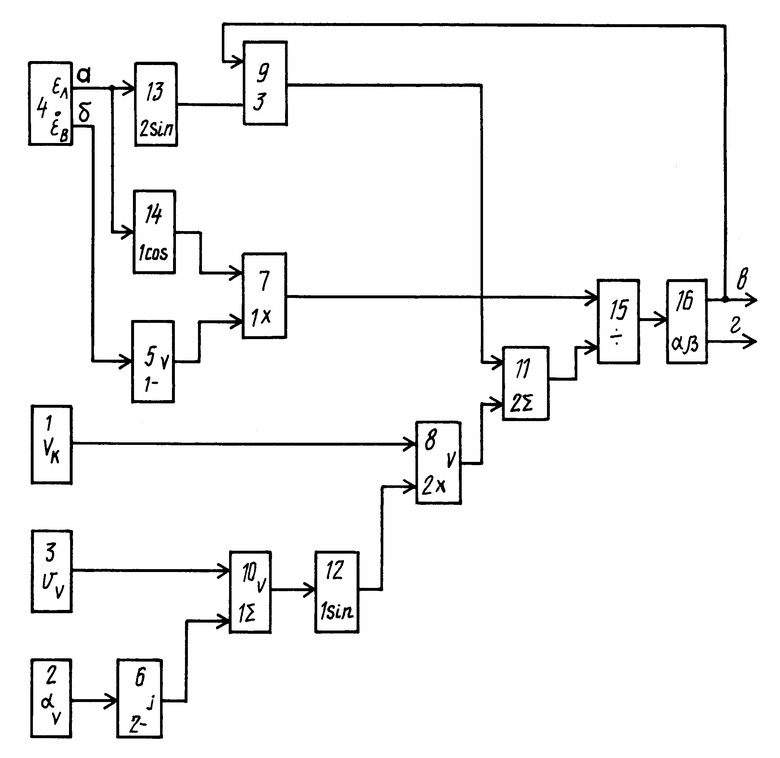
Устройство для определения дальности до сопровождаемой по углам цели и скорости сближения с ней, содержащее последовательно соединенные датчик угла атаки, первый инвертор, первый сумматор, второй вход которого подключен к выходу датчика угла тангажа, первый блок вычисления синуса и первый блок умножения, второй вход которого подключен к выходу датчика скорости, последовательно соединенные блок углового сопровождения по каналу угла между линией визирования и горизонтальной плоскостью, блок вычисления косинуса, второй блок умножения и функциональный делитель, последовательно включенные блок углового сопровождения по каналу производной угла между линией визирования и горизонтальной плоскостью и второй инвертор, выход которого подключен к второму входу второго блока умножения и фильтра вида
где Р - оператор Лапласа, К, α,β;
С - целые числа,
первый и второй выходы которого являются соответственно выходами сигнала скорости сближения и сигнала дальности устройства для определения дальности до сопровождения по углам цели и скорости сближения с ней, отличающееся тем, что, с целью повышения точности определения скорости сближения с целью и дальности до нее при сопровождении по углам маневрирующей в горизонтальной плоскости цели, введены последовательно соединенные второй блок вычисления синуса, вход которого подключен к входу блока вычисления косинуса, третий блок умножения, второй вход которого подключен к первому выходу фильтра вида  и второй сумматор, выход которого подключен к второму входу функционального делителя, при этом выход функционального делителя подключен к входу фильтра вида
и второй сумматор, выход которого подключен к второму входу функционального делителя, при этом выход функционального делителя подключен к входу фильтра вида  выход первого блока умножения соединен с вторым входом второго сумматора.
выход первого блока умножения соединен с вторым входом второго сумматора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США N 3982246, кл | |||
| Питательное приспособление к трепальной машине для лубовых растений | 1923 |
|
SU343A1 |
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 275312, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
