Изобретение относится к рельсовому транспорту и предназначено для определения присутствия постороннего предмета в контролируемой зоне и может быть использовано для контроля нижнего габарита подвижного состава.
Наиболее близким по технической сущности является устройство определения присутствия предмета в контролируемой зоне, которое содержит установленные в околорельсовом пространстве обращенные рабочей пластиной к контролируемой зоне бесконтактные емкостные преобразователи, связанные с измерительной аппаратурой.
Недостаток устройства заключается в его низкой избирательности, т.е. в невозможности определить появление относительно небольшого предмета в контролируемой зоне на фоне металлических конструкций дна вагона, не нарушающих нижний габарит подвижного состава. Пропуск такого предмета, которым может быть, например, распорная тяга вагона или любая другая деталь вагона, находящаяся вне габарита вследствие его неисправности, приводит к аварийной ситуации.
Целью настоящего изобретения является обеспечение безопасности движения подвижного состава путем повышения избирательности устройства.
Поставленная цель достигается тем, что в устройстве определения присутствия предмета в контролируемой зоне, содержащем установленные в околорельсовом пространстве обращенные рабочей пластиной к контролируемой зоне бесконтактные емкостные преобразователи, связанные с измерительной аппаратурой, емкостные преобразователи установлены под уровнем головки рельса с возможностью обеспечения перекрытия контролируемой зоны, причем конфигурация рабочей пластины каждого преобразователя выполнена несплошной, с возможностью обеспечения соизмеримости площади проекции предмета с площадью рабочей пластины, при этом каждый емкостной преобразователь подсоединен к соответствующему каналу измерительной аппаратуры.
Такое выполнение устройства, при котором емкостные преобразователи установлены под уровнем головки рельса с возможностью обеспечения перекрытия контролируемой зоны, причем конфигурация рабочей пластины каждого преобразователя выполнена несплошной с возможностью обеспечения соизмеримости площади проекции предмета с площадью рабочей пластины, при этом каждый емкостной преобразователь подсоединен к соответствующему каналу измерительной аппаратуры, позволяет повысить избирательность устройства, так как при появлении в контролируемой зоне предмета с площадью поперечного сечения, сравнимой с площадью элемента (части) рабочей поверхности преобразователя, значительно изменяется его электроемкость, которая может быть определена измерительной аппаратурой с большим отношением сигнала к шуму. Другими словами, устройство фиксирует все предметы, появляющиеся при движении поезда в контролируемой зоне и не реагирует на очертание нижней части подвижного состава, что обеспечивает безопасность движения.
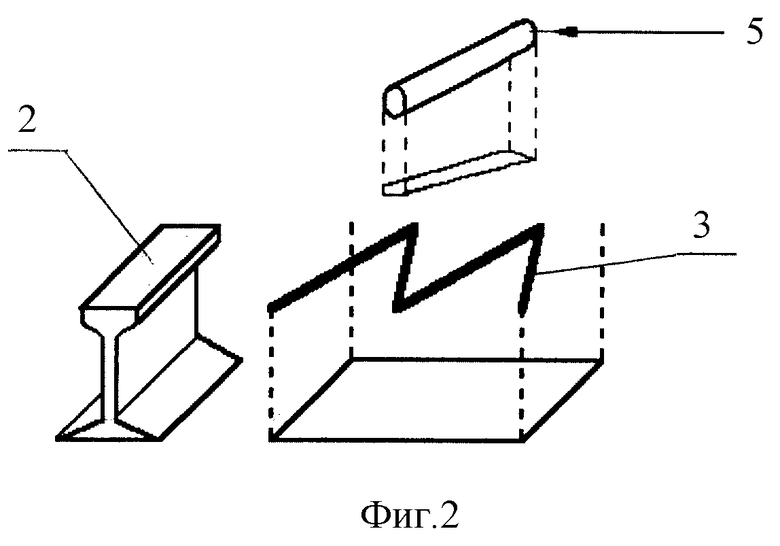
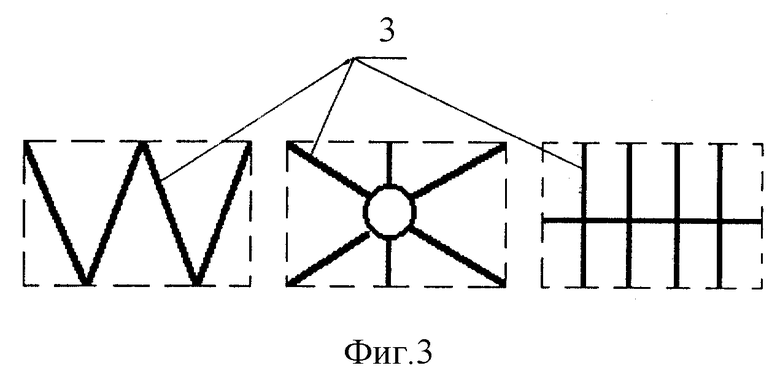
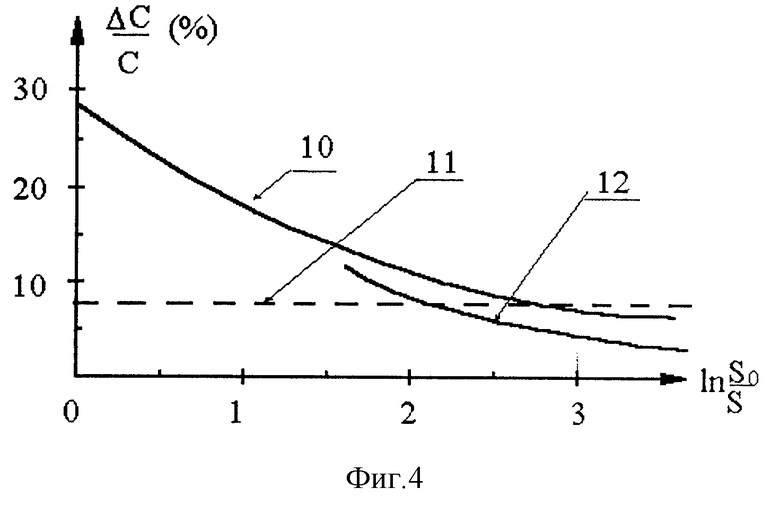
На фиг. 1 изображено устройство определения предмета в контролируемой зоне; на фиг. 2 - то же, в изометрии; на фиг. 3 - варианты выполнения рабочей пластины; на фиг. 4 - график зависимости относительного изменения емкости рабочей пластины при прохождении над ней предмета и подвижного состава.
Устройство содержит емкостные преобразователи 1, установленные в околорельсовом пространстве под уровнем головки рельса 2 и обращенные рабочей пластиной 3 к контролируемой зоне 4. Конфигурация рабочей пластины 3 каждого преобразователя 1 выполнена несплошной с возможностью обеспечения соизмеримости площади проекции предмета 5 с площадью рабочей пластины 3. Каждый емкостной преобразователь 1 подключен к соответствующему каналу 6 измерительной аппаратуры 7.
Устройство работает следующим образом. В исходном состоянии ожидания при отсутствии предмета 5 в контролируемой зоне 4 рабочая пластина 3 емкостного преобразователя 1 обладает заданной электроемкостью относительно окружающих предметов и нижней стабилизирующей пластины 8. При появлении над рабочей пластиной 3 в контролируемой зоне 4 предмета 5 изменяется электроемкость пластины 3. Последняя изменяется тем больше, чем меньше расстояние от пластины 3 до предмета 5, и возрастает с увеличением площади поверхности предмета 5, обращенной к рабочей пластине 3. Изменение емкости рабочей пластины 3 происходит также при прохождении над пластиной 3 элементов нижнего очертания подвижного состава. Это изменение емкости зависит в основном от расстояния до элементов дна 9 вагонов, так как их площадь много больше площади рабочей пластины 3. Выбирая размеры и конфигурацию рабочей пластины 3 так, чтобы изменение емкости при появлении предмета 5 было существенно больше, чем при прохождении над рабочей пластиной 3 нижнего очертания дна 9 вагона, можно с помощью порогового устройства (на чертеже не показано) измерительной аппаратуры 7 определять наличие предмета 5, нарушающего габарит.
На фиг. 4 линией 10 показана зависимость относительного изменения емкости рабочей пластины 3 несплошной конфигурации от отношения площади проекции предмета 5 к площади рабочей пластины 3. Горизонтальной линией 11 показан уровень изменения емкости рабочей пластины 3 при движении над ней подвижного состава. Для наглядности линией 12 обозначена зависимость относительного изменения емкости рабочей пластины, выполненной сплошной конфигурацией, от отношения площади проекции предмета 5 к площади рабочей пластины 3.
При этом расстояние от предмета 5 до рабочей пластины 3 (контролируемая зона) равно 50 мм и от рабочей пластины 3 до дна 9 вагона равно 100 мм. Площадь рабочей пластины 3 можно уменьшить при тех же внешних габаритах путем выполнения ее несплошной конфигурацией, например выполнить в виде буквы W или в виде решетки и т.п. (фиг. 3). В этом случае площадь несплошной рабочей пластины 3 должна быть в несколько раз меньше площади рабочей пластины 3, выполненной сплошной конфигурацией, т.е. быть соизмерима с площадью проекции предмета 5. Например, площадь рабочей пластины 3 равна 40 см2 для несплошной конфигурации, в то время как площадь пластины сплошной конфигурации при тех же внешних габаритах - 200 см2. Исходная емкость рабочей пластины несплошной конфигурации C0≈2 пф. При прохождении над рабочей пластиной 3 предмета (например, трубы диаметром 2 см и длиной 40 см, площадь проекции которой на рабочую пластину 3 составляет величину от 5 до 15 см2 в зависимости от ее ориентации) происходит относительное изменение емкости на величину от исходной емкости ≈ 10-25%, что составляет 0,2-0,5 пф. Это может быть надежно зафиксировано измерительной аппаратурой 7. На графике это изменение емкости отражено линией 10. А линией 11 показан уровень наибольшего изменения емкости, обусловленной прохождением дна 9 вагона. Для перекрытия полного расстояния возможного нарушения габарита подвижного состава используют группу емкостных преобразователей, т.к. продольный и поперечный размер каждого преобразователя должен быть соизмерим с размерами контролируемого предмета. А это обеспечивает необходимую избирательность устройства.
Использование такого устройства дает возможность своевременно выявить наличие постороннего предмета в контролируемой зоне под нижним габаритом подвижного состава и предупредить крушение поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОЛОДОЧНЫЙ ТОРМОЗ РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1999 |
|
RU2156709C1 |
| УСТРОЙСТВО ДЛЯ СНЯТИЯ ПОГЛОЩАЮЩЕГО АППАРАТА С ТЯГОВЫМ ХОМУТОМ СЦЕПНОГО УСТРОЙСТВА | 1998 |
|
RU2137631C1 |
| УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ ПОДВИЖНОГО СОСТАВА С РЕЛЬСОВ | 1998 |
|
RU2137640C1 |
| СПОСОБ РЕГИСТРАЦИИ СХОДА ВАГОНА ПОДВИЖНОГО СОСТАВА С РЕЛЬСОВ | 1998 |
|
RU2137633C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА ПРИ СХОДЕ ВАГОНА С РЕЛЬСОВ | 1998 |
|
RU2137632C1 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА ПОГЛОЩАЮЩЕГО АППАРАТА | 1999 |
|
RU2171188C2 |
| УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ КОЛЕСНОЙ ПАРЫ С РЕЛЬСОВ | 2000 |
|
RU2180298C1 |
| МОБИЛЬНЫЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 1995 |
|
RU2066645C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ХОДОВЫХ ЧАСТЕЙ ПОДВИЖНОГО СОСТАВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2167778C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ВАГОНОВ И ТЕЛЕЖЕК | 1997 |
|
RU2130398C1 |
Изобретение относится к рельсовому транспорту, предназначено для определения присутствия постороннего предмета в контролируемой зоне и может быть использовано для контроля нижнего габарита подвижного состава. Устройство содержит емкостные преобразователи. Преобразователи установлены в околорельсовом пространстве и обращены рабочей пластиной к контролируемой зоне. Конфигурация рабочей пластины выполнена несплошной. Площадь ее соизмерима с площадью проекции предмета. Каждый преобразователь подключен к соответствующему каналу измерительной аппаратуры. Технический результат - повышение безопасности движения подвижного состава. 4 ил.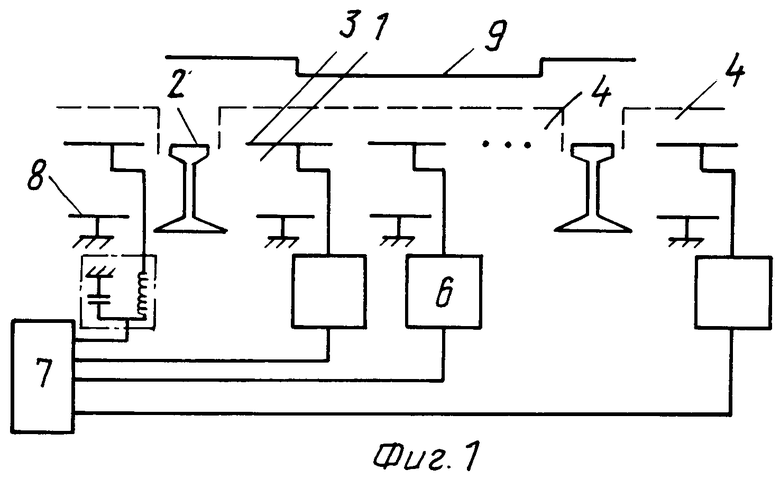
Устройство определения присутствия предмета в контролируемой зоне, содержащее установленные в околорельсовом пространстве обращенные рабочей пластиной к контролируемой зоне бесконтактные емкостные преобразователи, связанные с измерительной аппаратурой, отличающееся тем, что емкостные преобразователи установлены под уровнем головки рельса с возможностью обеспечения перекрытия контролируемой зоны, причем конфигурация рабочей пластины каждого преобразователя выполнена несплошной, с возможностью обеспечения соизмеримости площади проекции предмета с площадью рабочей пластины, при этом каждый емкостной преобразователь подсоединен к соответствующему каналу измерительной аппаратуры.
| Устройство для определения положения колеса рельсового транспортного средства относительно рельса | 1988 |
|
SU1685775A1 |
| Устройство для контроля проследования колеса железнодорожного транспортного средства | 1988 |
|
SU1615009A1 |
| US 4753403 A, 02.06.88 | |||
| ГАЗОВЫЙ СЕПАРАТОР | 1997 |
|
RU2123590C1 |

