Изобретение относится к области автоматического регулирования, а конкретно к приводам подъемных механизмов, работающих в условиях значительной неуравновешенности нагрузки, например, электрогидравлические приводы стрелового оборудования экскаваторов, кранов, подъемников и т.п.
Известны электрогидравлические приводы [1, стр. 120, 121], предназначенные для использования в качестве исполнительных в условиях значительной неуравновешенности нагрузки. В этих приводах компенсирование влияния неуравновешенности на точностные характеристики проводится за счет использования силовых цилиндров с односторонним штоком, имеющим разную эффективную площадь поршня при движении вверх и вниз. Однако при этом получаются разные расходные (скоростные) характеристики гидропривода при смене направления движения. Существует также техническое решение, компенсирующее неуравновешенность нагрузки на силовом цилиндре, заключающееся в том, что силовой цилиндр снабжается третьей полостью, запитываемой постоянным давлением от гидроаккумулятора. Это техническое решение используются в приводе изделия П-800 [2], где применяется рулевой агрегат РА-83 [3], имеющий третью штоковую полость, с помощью которой компенсируется неуравновешенность нагрузки изделия П-800. Однако это техническое решение не позволяет удовлетворительно решить задачу обеспечения равенства характеристик привода при смене направления движения в случае изменения в процессе работы величины неуравновешенности, что имеет место при работе подъемников (изменение полезной нагрузки, количества членов экипажа и т.п.). Одним из главных условий качественной работы приводов подъемного оборудования является равенство реакции привода на управляющие и возмущающие воздействия при движении по и против неуравновешенности. Это требование становится особенно актуальным в случаях, когда приводы управляют нагрузкой, в которой располагается экипаж, например, люлькой с оператором в высотном подъемнике.
Существенное улучшение параметров приводов за счет выравнивания их характеристик при смене направления движения можно получить, используя в структуре приводов коррекции по сигналу скорости, ускорению или дифференциала ошибки [1, стр. 140]. Чем больше коэффициент передачи контуров обратных связей по скорости и ускорению, тем меньше разница в характеристиках привода при движении вверх или вниз при наличии неуравновешенности. Такие технические решения применены в приводе динамического стенда КТС-204 [4] (принятого за прототип). Эти решения (фиг. 1) содержат соединенные последовательно чувствительный элемент 1, формирователь управляющих сигналов 2, усилитель мощности 3 и исполнительный привод 4, причем вход чувствительного элемента 1 связан с исполнительным приводом 4. В данном приводе формирователь управляющих сигналов 2 обеспечивает коррекцию по скоростному контуру, улучшающую выравнивание параметров привода, однако, в связи с имеющимися ограничениями, накладываемыми условиями устойчивости контуров привода, не удается обеспечить точность воспроизведения управляющих воздействий и получить также коэффициенты передачи контуров привода, которые позволили бы полностью уравнять параметры при движении по и против неуравновешенности в условиях, когда неуравновешенность значительно меняется в процессе работы привода.
Изобретение направлено на повышение точности воспроизведения приводом управляющих воздействий за счет обеспечения равенства точностных параметров привода при движении вверх или вниз в условиях изменения величины неуравновешенности при работе привода. Достижение равенства характеристик привода при движении вверх и вниз происходит за счет введения в структуру привода устройства, реализующего компенсацию влияния действующей на силовой цилиндр неуравновешенности, определяемой по величине действующего момента.
Сущность предлагаемого технического решения заключается в том, что в следящий привод, содержащий последовательно соединенные чувствительный элемент, формирователь управляющих сигналов, усилитель мощности и исполнительный привод, с которым связан вход чувствительного элемента, введен датчик момента и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между сумматором и усилителем мощности, причем детекторы в параллельных цепях имеют разную полярность, а управляющие входы управляемых усилителей-ограничителей соединены с выходом датчика момента, вход которого соединен с выходом усилителя мощности.
Материалы заявки поясняются фигурами, где представлены:
на фиг. 1 - блок-схема следящего привода, принятого за прототип;
на фиг. 2 - блок-схема предлагаемого следящего привода;
на фиг. 3 - схемная реализация детектора;
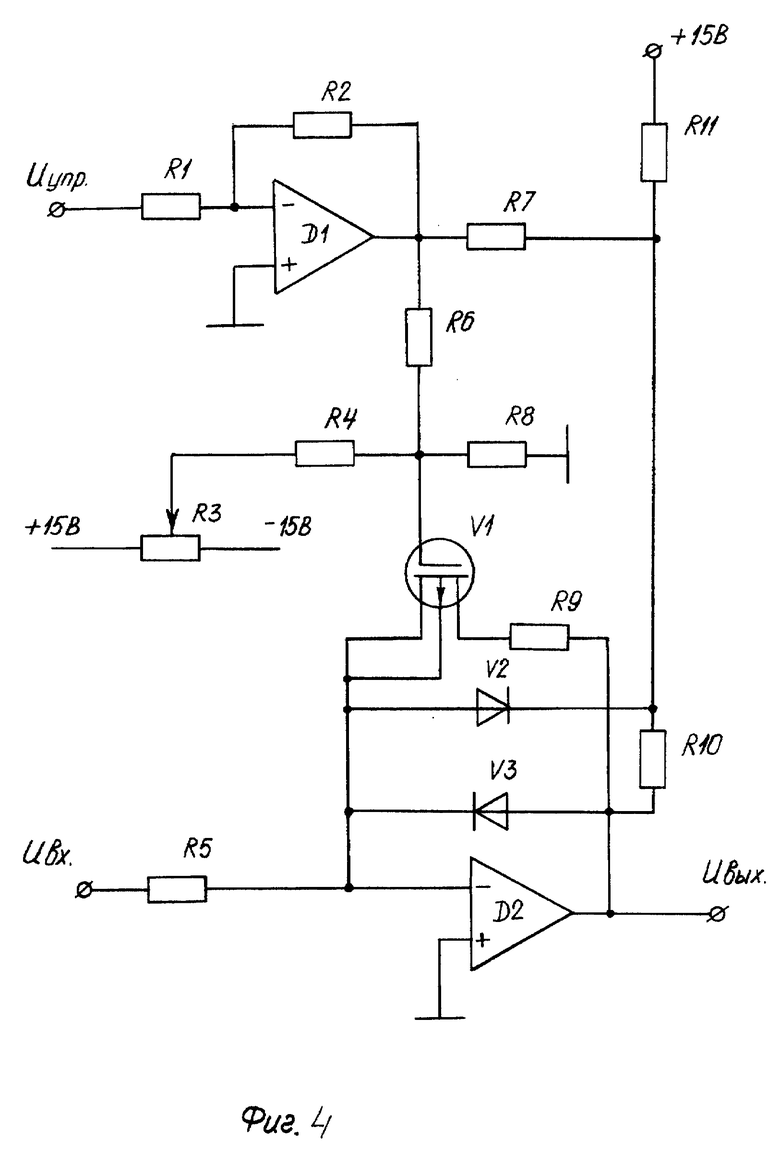
на фиг. 4 - схемная реализация управляемого усилителя-ограничителя;
на фиг. 5 - примеры переходных процессов следящих электрогидроприводов при отработке скачков управляющего воздействия до и после использования предлагаемого технического решения.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше результата, изложены на блок-схеме следящего привода, представленной на фиг. 2.
Предлагаемый следящий привод содержит последовательно соединенные чувствительный элемент 1, формирователь управляющих сигналов 2, усилитель мощности 3 и исполнительный привод 4, с которым связан вход чувствительного элемента 1. Предлагаемое изобретение отличается от прототипа (фиг. 1) тем, что между формирователем управляющих сигналов 2 и усилителем мощности 3 включено параллельное соединение двух последовательных цепей, каждая из которых состоит из детектора 5 или 6 и управляемого усилителя-ограничителя 7 или 8, причем детекторы 5 или 6 имеют разную полярность пропускаемого сигнала. Привод также содержит датчик момента 9 ( в электроприводе - датчик тока, в гидроприводе - датчик давления), вход которого соединен с выходом усилителя мощности 3, а выход - с управляющими входами управляемых усилителей-ограничителей 7 и 8.
Принцип действия предлагаемого привода заключается в том, что при движении против неуравновешенности коэффициент усиления привода и уровень ограничения выходного сигнала увеличивается, а при движении по неуравновешенности коэффициент усиления и уровень ограничения выходного сигнала управляемых усилителей-ограничителей 7 или 8 уменьшается, причем это увеличение или уменьшение производится в зависимости от величины действующего на привод момента, пропорционального сигналу датчика момента 9.
Приведенные на фиг. 2 детекторы 5 и 6 имеют разную полярность, поэтому один из них (например, детектор 5) пропускает только положительное напряжение с выхода формирователя управляющих сигналов 2, а другой (например, детектор 6) - отрицательное. Возможная схема детектора (5 или 6), пропускающего положительное напряжение, представлена на фиг. 3. Детектор, пропускающий отрицательное напряжение, имеет аналогичную схему, но с диодами V1 и V2, включенными в обратном направлении.
Одна из возможных простейших схем управляемого усилителя-ограничителя (7 или 8) представлена на фиг. 4. Входное напряжение Uвх управляемого усилителя-ограничителя через резистор R5 поступает на инвертирующий вход операционного усилителя D2, в цепи обратной связи которого включен диод V3, осуществляющий дополнительную блокировку прохождения через усилитель отрицательного напряжения, поступающего на резистор R5. Коэффициент передачи операционного усилителя D2 по положительному сигналу определяется отношением суммы сопротивлений резистора R9 и полевого транзистора V1 к сопротивлению R5. Изменение сопротивления полевого транзистора обеспечивается управляющим сигналом Uупр., поступающим с датчика давления 12 (фиг. 2), и усиленным инвертирующим операционным усилителем D1, при этом соотношение сопротивлений резисторов R6 и R8 обеспечивает необходимую степень влияния усиленного напряжения Uупр. на сопротивление полевого транзистора V1 и, соответственно, на коэффициент усиления операционного усилителя D2. С помощью резистора R4 и переменного резистора R3 обеспечивается выставка начального сопротивления транзистора V1 и, соответственно, начального коэффициента усиления операционного усилителя D2. Необходимое направление изменения сопротивления транзистора V1 обеспечивается подключением к затвору транзистора V1 инвертированного или неинвертированного сигнала Uупр.. Ограничение выходного напряжения операционного усилителя D2 обеспечивается с помощью резисторов R10, R11 и диода V2. При достижении в общей точке резисторов R10, R11 и диода V2 напряжения, равного напряжению открывания диода V2, возникает дополнительная обратная связь операционного усилителя D2 через резистор R10 и диод V2, при этом сопротивление резистора R10 выбирается много меньше суммарного сопротивления резистора R9 и полевого транзистора V1 и меньше резистора R5, что приводит при открывании диода V2 к резкому снижению коэффициента передачи и практическому ограничению сигнала на выходе операционного усилителя D2. Подключение к общей точке резисторов R10, R11 еще и выходного напряжения операционного усилителя D1 через резистор R7 обеспечивает влияние сигнала Uупр. на напряжение в общей точке резисторов R10, R11 и, соответственно, влияние на уровень ограничения выходного сигнала операционного усилителя D2. Таким образом, схема обеспечивает необходимое уменьшение или увеличение коэффициента усиления операционного усилителя D2 путем изменения сопротивления полевого транзистора V1, а также изменение ограничения выходного напряжения операционного усилителя D2 путем изменения напряжения в общей точке резисторов R10 и R11. Выход операционного усилителя D2 является выходом управляемого усилителя-ограничителя.
Предлагаемое техническое решение проверено электронным моделированием, а также экспериментальной проверкой макетного образца привода. Результаты проверок показали, что параметры приводов, в частности переходных процессов, по и против неуравновешенности после использования предлагаемого решения практически совпали. На фиг. 5 приведены переходные процессы электрогидроприводов, полученные на стенде при воздействии существенной неуравновешенности, до и после использования предлагаемого технического решения.
На фиг. 5 использованы следующие обозначения:
а - график изменения входного воздействия;
б - график отработки входного воздействия до использования предлагаемого технического решения;
в - график отработки входного воздействия после использования предлагаемого технического решения.
Как видно из графика "б" (фиг. 5) до использования предлагаемого технического решения при настройке привода на апериодический процесс при отработке скачка управляющего воздействия против неуравновешенности получается колебательный процесс с несколькими перебегами при отработке скачка управляющего воздействия по неуравновешенности. Это ограничивает устойчивость привода и точность его работы.
После использования предлагаемого технического решения удалось получить практически одинаковые графики отработки скачков управляющего воздействия против и по неуравновешенности (график "б"), при этом удалось существенно увеличить коэффициент передачи привода, о чем можно судить по уменьшению времени отработки скачка входного воздействия против неуравновешенности.
По результатам экспериментальных исследований предлагаемое техническое решение использовано в документации электрогидравлических приводов пожарного автоподъемника ПКТ-50.
Литература
1. Ю. И. Чупраков "Гидропривод и средства гидроавтоматики" М.: Машиностроение, 1979 г.
2. Привод изделия П-800 ПБ1.331082РЭ ВНИИ "Сигнал" г. Ковров, 1992 г.
3. Рулевой агрегат РА-83 РА-83.000 РЭ АООТ "Родина", г. Москва, 1982 г.
4. Динамический стенд КТС-204. Техническое описание. ПКБМ, г. Пенза.
5. Авт. свид. СССР N 780136 А (МИСИ), 15.11.80.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2005 |
|
RU2284047C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ГАММА-ИЗЛУЧЕНИЯ В УСЛОВИЯХ НЕРАВНОМЕРНОГО РАДИОАКТИВНОГО ЗАГРЯЗНЕНИЯ | 2000 |
|
RU2195005C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 1996 |
|
RU2095728C1 |
| ВЫКЛЮЧАТЕЛЬ ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2036553C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| КОРРЕКТОР КОЭФФИЦИЕНТА МОЩНОСТИ | 2014 |
|
RU2560103C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕКВАДРАТИЧЕСКОГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ | 2000 |
|
RU2198410C2 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2131591C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ ЭЛЕКТРОПРИВОДА С ГЕНЕРАТОРНЫМ ТОРМОЖЕНИЕМ | 2008 |
|
RU2392729C1 |



Предлагаемое изобретение относится к области систем автоматического регулирования, а конкретно, к приводам подъемных механизмов, работающих в условиях значительной неуравновешенности нагрузки, причем величина нагрузки может значительно меняться в процессе работы. Технический результат заключается в повышении точности воспроизведения приводом управляющих воздействий. Следящий привод содержит последовательно соединенные чувствительный элемент, формирователь управляющих сигналов, усилитель мощности и исполнительный привод, с выходом которого связан вход чувствительного элемента, а также датчик момента и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между выходом формирователя управляющих сигналов и входом усилителя мощности, причем управляющие входы управляемых усилителей-ограничителей соединены с выходом датчика момента, вход которого соединен с выходом усилителя мощности. 5 ил.
Следящий привод, содержащий последовательно соединенные чувствительный элемент, формирователь управляющих сигналов, усилитель мощности и исполнительный привод, с выходом которого связан вход чувствительного элемента, отличающийся тем, что в состав привода включен датчик момента и две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, включенные между выходом формирователя управляющих сигналов и входом усилителя мощности, причем детекторы в параллельных цепях имеют разную полярность, а управляющие входы управляемых усилителей-ограничителей соединены с выходом датчика момента, вход которого соединен с выходом усилителя мощности.
| Устройство для управления электроприводом скоростного лифта | 1978 |
|
SU780134A1 |
| Устройство для управления электроприводом подъемной машины | 1978 |
|
SU780136A1 |
| ФАСОВОЧНО-УПАКОВОЧНЫЙ ВЕРТИКАЛЬНЫЙ АППАРАТ | 1998 |
|
RU2129972C1 |
| US 4501343 A, 26.02.85 | |||
| US 4611689 A, 16.09.86 | |||
| Чупраков Ю.И | |||
| Гидропривод и средства гидроавтоматики | |||
| - М.: Машиностроение, 1979, с.120, 121, 140. | |||
