Изобретение относится к области автоматического регулирования, а конкретно к приводам подъемных механизмов, работающих в условиях значительной неуравновешенности нагрузки, например электрогидравлические приводы стрелкового оборудования экскаваторов, кранов, подъемных устройств, тренажеров и т.п.
Известны электрогидравлические следящие приводы, предназначенные для использования в условиях значительной неуравновешенности нагрузки, причем эта неуравновешенность претерпевает ощутимые изменения в процессе выполнения рабочих операций. В этих приводах компенсация влияния неуравновешенности на точностные характеристики проводится:
за счет использования силовых цилиндров с разной эффективной площадью поршня [1],
за счет применения специальной штоковой полости цилиндра [2],
за счет корректирующих обратных связей [3].
Однако эти технические решения не позволяют удовлетворительно решить задачу обеспечения равенства технических характеристик привода при смене направления движения нагрузки и изменении величины неуравновешенности в процессе работы привода.
Известен также следящий привод [4], принятый за прототип предлагаемого устройства.
Техническое решение, заложенное в прототипе, обладает недостатком в обеспечении точности выравнивания технических характеристик следящего привода при движении нагрузки по и против неуравновешенности в условиях значительного динамического изменения момента неуравновешенности, т.к. компенсация влияния момента неуравновешенности обеспечивается, в основном, в статическом режиме работы привода, что не позволяет обеспечить необходимую точность воспроизведения приводом динамических управляющих воздействий.
Заявляемое изобретение направлено на повышение динамической точности воспроизведения приводом управляющих воздействий за счет обеспечения равенства технических характеристик привода при значительных изменениях действующих нагрузок при движении по или против неуравновешенности. Достижение равенства технических характеристик обеспечивается за счет введения в структуру следящего привода устройства, реализующего компенсацию влияния динамической составляющей, действующей на привод неуравновешенности.
Сущность предлагаемого технического решения заключается в том, что в состав следящего привода, содержащего последовательно соединенные чувствительный элемент, формирователь управляющих сигналов, две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, причем детекторы в параллельных цепях имеют разную полярность, усилитель мощности и исполнительный привод, выход которого связан входом чувствительного элемента, а также датчик момента, вход которого соединен с выходом усилителя мощности, а выход с первыми управляющими входами управляемых усилителей-ограничителей, включены последовательно соединенные дифференциатор, усилитель и масштабный делитель, выход которого подключен ко вторым управляющим входам управляемых усилителей-ограничителей, а вход дифференциатора соединен с выходом датчика момента.
Материалы заявки поясняются чертежом, где приведена функциональная схема предлагаемого следящего привода.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, изложены по функциональной схеме предлагаемого следящего привода.
Предлагаемый следящий привод содержит последовательно соединенные чувствительный элемент 1, формирователь управляющих сигналов 2, две параллельно соединенные цепи, состоящие из детектора 3 (4) и управляемого усилителя-ограничителя 5 (6), усилитель мощности 7 и исполнительный привод 8, с выходом которого связан вход чувствительного элемента 1, причем детекторы 3 (4) в параллельных цепях имеют разную полярность. Привод также содержит датчик момента 9, вход которого соединен с выходом усилителя мощности 7, а выход - с первыми управляющими входами управляемых усилителей-ограничителей 5 (6). В отличие от прототипа привод содержит последовательно соединенные дифференциатор 10, усилитель 11 и масштабный делитель 12, выход которого подключен ко вторым управляющим входам управляемых усилителей-ограничителей 5 (6), а вход дифференциатора 10 соединен с выходом датчика момента 9.
Широко известные в технике вновь введенные элементы: дифференциатор 10, усилитель 11 и масштабный делитель 12, в совокупности с остальными элементами предлагаемого следящего привода в приведенной взаимосвязи обеспечивают устранение вышеуказанного недостатка прототипа.
Принцип действия предлагаемого следящего привода заключается в том, что в дополнение к имеющейся у прототипа возможности компенсации влияния статической составляющей момента неуравновешенности нагрузки, действующего на исполнительный привод 8, в предлагаемой схеме дифференциатор 10 вырабатывает сигнал, пропорциональный скорости изменения момента неуравновешенности нагрузки и, через усилитель 11 и масштабный делитель 12, подает его на вторые управляющие входы управляемых усилителей-ограничителей 5 и 6. Усилители-ограничители 5 и 6 изменяют коэффициент усиления и уровень ограничения сигнала на усилителе мощности 7 в зависимости от скорости изменения действующего момента неуравновешенности (в дополнение к учету изменения действующего момента неуравновешенности в статике), что позволяет повысить выравнивание точностных параметров привода при движении по и против неуравновешенности.
При моделировании предлагаемого технического решения на ПЭВМ удалось получить практически одинаковые параметры отработки скачков управляющего воздействия как по, так и против значительно изменяющейся неуравновешенности.
По результатам экспериментальных исследований предлагаемое техническое решение внедрено в документацию следящих приводов модернизированного шестистепенного динамического стенда, разрабатываемого совместно ОАО ПКБМ, г.Пенза и ФГУП "ВНИИ "Сигнал", г.Ковров.
Литература
1. Чупраков Ю.И. Гидропривод и средства гидроавтоматики. - М.: Машиностроение, 1979 г.
2. Привод изделия П-800 ПБ1.331.082 РЭ, ФГУП "ВНИИ "Сигнал", г.Ковров, 1992 г.
3. Динамический стенд КТС-204. Техническое описание. ОАО ПКБМ, г.Пенза.
4. Следящий привод. Патент на изобретение № 2145724 от 04.12.1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2004 |
|
RU2259597C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 1996 |
|
RU2129305C1 |
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| СЛЕДЯЩИЙ ПРИВОД | 2007 |
|
RU2361258C1 |
| Автономная электроэнергетическая установка с синхронными дизель-генераторами | 1982 |
|
SU1128364A1 |
| ДИНАМИЧЕСКИЙ СТЕНД | 2005 |
|
RU2285959C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2006 |
|
RU2319163C1 |
| Измеритель сопротивления кондуктометрического датчика | 1980 |
|
SU898342A1 |
| ДИНАМИЧЕСКИЙ СТЕНД АВИАЦИОННОГО ТРЕНАЖЕРА | 2011 |
|
RU2486600C1 |
Изобретение относится к области автоматического регулирования, а конкретно к приводам подъемных механизмов, работающих в условиях значительной неуравновешенности нагрузки. Технический результат заключается в повышении точности воспроизведения приводом управляющих воздействий. Следящий привод содержит последовательно соединенные чувствительный элемент, формирователь управляющих сигналов, две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, причем детекторы в параллельных цепях имеют разную полярность, усилитель мощности и исполнительный привод, выход которого связан с входом чувствительного элемента, а также датчик момента, вход которого соединен с выходом усилителя мощности, а выход - с первыми управляющими входами управляемых усилителей-ограничителей. В него также включены последовательно соединенные дифференциатор, усилитель и масштабный делитель, выход которого подключен ко вторым управляющим входам управляемых усилителей-ограничителей, а вход дифференциатора соединен с выходом датчика момента. 1 ил.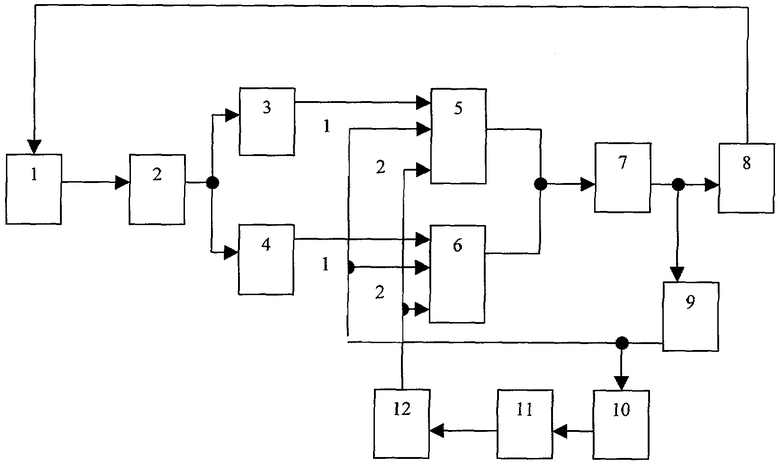
Следящий привод, содержащий последовательно соединенные чувствительный элемент, формирователь управляющих сигналов, две параллельно соединенные цепи, состоящие из детектора и управляемого усилителя-ограничителя, причем детекторы в параллельных цепях имеют разную полярность, усилитель мощности и исполнительный привод, выход которого связан с входом чувствительного элемента, а также датчик момента, вход которого соединен с выходом усилителя мощности, а выход с первыми управляющими входами управляемых усилителей-ограничителей, отличающийся тем, что в него включены последовательно соединенные дифференциатор, усилитель и масштабный делитель, выход которого подключен ко вторым управляющим входам управляемых усилителей-ограничителей, а вход дифференциатора соединен с выходом датчика момента.
| СЛЕДЯЩИЙ ПРИВОД | 1998 |
|
RU2145724C1 |
| Устройство для управления электроприводом скоростного лифта | 1978 |
|
SU780134A1 |
| ФАСОВОЧНО-УПАКОВОЧНЫЙ ВЕРТИКАЛЬНЫЙ АППАРАТ | 1998 |
|
RU2129972C1 |
| US 4611689 A, 16.09.1986. | |||

