жду ИСТОЧНИКОМ постоянного напряйсёння и входом регулятора ыомета двигателя
.
Недостатком втого устройства являетя пониженная производительност| подъемой машины и недостаточная точность восроизведения задаваемого закона изменеия скорости, вследствие того, что не читывается влияние изменяющегося мо ента трения в зависимости от направяе- 0 Яй:я Движения на ускорение влектрсятриаоа, а также влияние кк енения массы машины при изменении загруаси кабины на 1этр ускорение, что приводит к уменьшению ускорения при увеличении вагружи U кабины, увеличению -длитеяьностй переход- ных процессов и уменьшению производите йькосНрк, а изменение ускорений и радвка вследствие изменения момента трения и изменения массы машины, ИЁменяя диаграмму движения, уменьшает комфорта бель ностьподъемной машиш.
Цель изобретения - увеличение производительности подъемной машины и увеличение точности восйройзвея йв задаваемоч 1$ го закона изменения скорости в tfponecce раагона и торможеиий.
Эта цель достигается тем, что устро-. йство для управления &JieKtpon{ 8&otciOM аодьемной машины, содержащее включенные ио-зв ЫейоЁатеЛьио ре улятс ёкорОстй ti peFy-. лятор момента двигателя с подключеннь ; мй к Их входам датчиками cjcbptxJtH и момё№Ш Й6Й ГИТёля, noBkrtiweHHbie ко likojay регулятора момента.двигателя через епе- jj мент суммирование датчик вагруЕяси кабины подъемной машины И ибточнин ttocTOSiHного напряжения, снабжено блсжом перемножения и операционным усилителем с €поkONi ограничения в цепи его обратнснй свя о аи, причем блок перемножения включен выходом регулятора скорости и входом регулятора момента двигат еля, второй вход блока перемножения порслючен к выходу датчика загрузки кабины, вУход , операционного усилителя подключен ко входу регулятора момента двигателя, а к трем его входам подключены выходы датчика момента двигателя, датчика скороста и элемента Суммирования.„
Существо йвобретения поясняется чер тежом, на котором приведена схема уст- ройства.
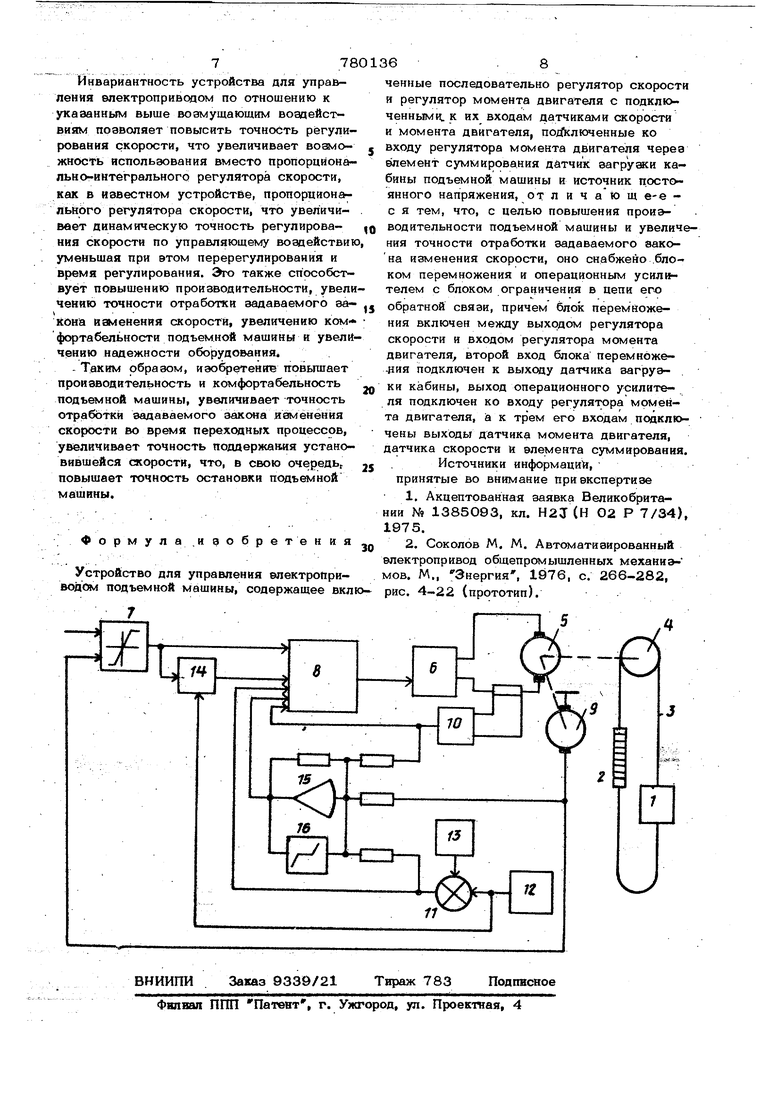
Кабина 1 и противовес 2 подъемной машины соединены канатом 3, переброшенным через канатоведущий шкив 4, вал которого соединен с валом двигателя 5, питающегося от управляемого преобразователя 6, - .
Устройство для управления електроприводом подъемной машины содержит включенные последовательно регулятор 7 скорости и регулятор 8 момента двигателя с подключенными к их входам датчиками скорости 0 и момента 10 двигателя, подключенные ко входу регулятора 8 момента двигателя через элемент 11 суммирования датчик 12 загрузки кабины подъемист машины и источн(ж 13 постоянного на. пряжения, блок 14 перемножения и операционный усилитель 15 с блоком 16 ограничения в цепи его обратной связи, причем блок 14 перемножения включен между выходом регулятора 7 скорости и входом регулятора 8 момента двигателя, второй вход бйока 14 перемножения подключен к выходу датчика 12 еагруаси кабины, выход операйИонного усилителя 15 подключен ко входу регулятора 8 момента двигателя, ..;а к трем его входам подключены выходы датчика 10 момента двигателя, датчика 9 скорости и элемента 11 суммирования. .; Работает устройство следующим обраSCfM.. ; - ... ...
Выходной сигйал источника 13 постоянного напряжения выбирают пропорциональным разности беса порожней кабины 1 и веса . противовеса 2. Этот сигнал складывает-. ся свыходным сигналом датчика 12 заг1) кабины подъемной машины, в ре аул trтате чего выходкой сигнал елемента 11 . суммирования, поступающий на вход регулятора 8 момента двигателя, пропорционален величине внешней нагрузки втого двигателя.
Операционный усилитель 15 обеспечивает формировайй1в сигнала, пропорцИонального мсмиенту трений в механической передаче. При нулевой скорости двигателя (равен нулю выходной, сигнал датчика 9 скорости) сумма поступающих на первый и третий входы регулятора момента сигналов с выходов датчика 10 момента двигателя и елемента 11 суммирования, пропорциональная дейс-рвующему на приведенную массу подъемной машины моменту, обеспечивает формирование на выходе операционного усилителя 15, пропорционального моменту трения сигнала, который при малых значениях действующего момента равен последнему по величине ипротйбопопожён ему по энаку,а прибо- льших значениях действующего момента, превышающих по величине макс1шальнг)е значение момента тренищ, ограничивается на максимальном уровне с помощью блока 16 ограничения. При ненулевой скорости выходной сигнал датчика 9 скорости поступает на второй вход операционного усилитепя 15, коэффициент усиления по которсАйу выбирается на два порадка выше коэффици тов усиления по первому и третьему вхсхдам, вследствие чего на выходе операцион ного усилителя 15 формируется сигнал,со- о ветствующий моменту трения движения, величина которого определяется величиной напряжения ограничения блока16 ограничен а его знак противоположен знаку скорости Таким образом, как в режиме покоя, так и в режиме движения выходной сигнал опе рационного усилителя 15 соответствует ве личине момента трения. Сумма выходных сигналов элемента 11 суммирования и операционного усилителя 15, поступающих на вход регулятора 8 момента двигателя, обеспечивает инвариан тность системы управления электроприводом как по отношению к величине изме няющегося момента нагрузки, так и по отношению к изменяющейся величине мсймента трения. При этом внутренний конту регулирования с регулятором 8 станойит сй контуром регулирования динамического момента двигателя, задание величины которого определяется суммой входных сигналов регулятора 8 момента двигателя, tio ступающих с .выхода регулятора 7 скорост непосредственно и через блок 14 перемно жения. Сигнал задания динамического момента двигателя, поступающий непосредственно с выхода регулятора 7 скорости на вход регулятора 8 момента, выбирают равным произведению заданного ускорения на приведенную масиу подъемной машины при по рожней кабине. Поскольку при порожней кабине выходной сигнал датчика 12 аагрузки кабины равен нулю, равен нулю также выходной сигнал блока 14 перемножения, а указанный выше сигнал обеспечивает движение машины с заданным ускорением, максимальное значение которого ограничивается максимальным значением выходного напряжения регулятора 7 скоро сти на допустимом уровне, С увеличением загрузки кабины увеличивается также п эиведенкая масса подъемной машины, но одновременно увеличивает ся выходной сигнал датчика 12 загрузки кабины, который поступает на второй вход блока 14 перемножения. При этом с выход регулятора 7 скорости на вход регулятора 8 момента двигателя через блок 14 перемножения поступает пропорциональный заруасе кабины, а следовательно, и пропорциональный изменению приведенной массы подъемной машины дополнительный сигнал задания динамического момента- двигате- ля. Этот дополнительный сигнал, а вместе с ним и суммарный сигнал задания динамического момента будет тем больше, чем больше приведенная масса подъемной машины, причем суммарный сигнал задания динамического момента будет независимо от загрузки кабины пропорционален проиэведеняю заданного ускорения (выходной сигнал датчика 7 скорости) на сумму при-: веденной массы подъемной машины с порожней кабиной и дополнительной массы, определяемой величиной загруасй кабины, что обеспечивает исключение зависимости задаваемого и отрабатываемого системой управления ускорения от изменения приведенной массы подъемной машины, вследствие иэ менения загрузки кабины. Это обеспечивает инвариантность системы по отношению к указанному изменению приведенной массы, незавксямо от величины которой во время переходных процессов: задается максимальное ускорение, определяемое максимальным значением вь1ходного напряжения регулятора 7 скорости, что повышает производительность подъемной машины. Инвариантность системы управления по отношению к моменту нагрузки, к моменту трения и к из лёнeнию приведенной массы уменьшает рывки и перерегулирования прн разгоне и торможении, увеличив ает точность отра&тки задаваемого закона изменения скорости во время переходных процессов, что уменьшает время переходных процессов и тем самым увеличивает производительность подъемной машины, а также повышает комфортабельность подъемной машины и снижает динамические нагрузки, обеспечивая повышение надежности оборудования. В скоростных подъемных машинах с беэредукторным электроприводом изменение загрузкн кабины может изменять приведенную маСсу подъемной машины на 30-40%, что примерно на такую же величину нзменяет ускорение при постоянном задании его величины в случае полностью загруженной кабины. Изобретение позволяет исключить указанное, уменьшение ускорения и тем повысить производительность. Наличие трения в известных устройстах при использовании максимального усорения в процессе торможения приводит процессе разгона (при одинаковых макимальных значениях момента) двигателя уменьшению ускорения, соответствующеу двойному значению момента трения. тот недостаток исключается в данном изоретении.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным электроприводом | 1979 |
|
SU788325A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| Устройство для управления электроприводом скоростного лифта | 1978 |
|
SU780134A1 |
| Устройство для управления наклонной шахтной подъемной установкой | 1981 |
|
SU971770A1 |
| Устройство для управления асинхроннымдВигАТЕлЕМ C фАзНыМ POTOPOM | 1979 |
|
SU851713A1 |
| Устройство для управления поворотом одноковшового экскаватора | 1977 |
|
SU682615A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1414745A1 |
| Устройство для управления подъемной машиной | 1985 |
|
SU1331784A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
