Изобретение относится преимущественно к области станкостроения, в частности к приводам перемещений подвижных органов станков, обладающих возможностью осуществления малых перемещений, и может быть использовано в прецизионных станках, подвижные органы которых имеют значительную величину хода и одновременно требуют малых перемещений на любом участке хода, например в универсальных станках, а также в устройствах, где требуется возвратно-поступательное перемещение, например в авиа- и ракетостроении.
Известен привод координатных перемещений станка, содержащий связанную с ходовым винтом муфту фиксированного угла поворота, механизм вращения ходового винта с зубчатой передачей (авторское свидетельство СССР N 346036, кл. B 23 B 39/04, опубл. 28.07.72 г.).
Существенным недостатком известного привода является малый диапазон скоростей перемещения подвижного органа за счет наличия зубчатой передачи и оборотной муфты, ограничивающих диапазон скоростей.
Известен привод для перемещения подвижного органа станка, содержащий основной ходовой винт, расположенный в опорах, с механизмом его вращения (авторское свидетельство СССР N 1115882, кл. B 23 Q 5/00, опубл. 30.09.84 г. ).
Существенным недостатком известного привода является малый диапазон скоростей за счет выполнения механизма вращения ходового винта в виде ременной передачи с механизмом передачи крутящего момента, а малые скорости перемещения обеспечиваются сложным механизмом ручного вращения ходового винта.
Наиболее близким к заявляемому изобретению является привод для перемещения подвижного органа станка, содержащий основной ходовой винт, расположенный в опорах, механизм вращения и кинематически связанное с основным ходовым винтом колесо (патент Великобритании N 1529446 A, B 23 B 5/00, 1978).
Существенным недостатком известного привода является малый диапазон скоростей перемещения подвижного органа станка.
Задачей изобретения является создание привода для перемещения подвижного органа станка, обладающего широким диапазоном скоростей.
Эта задача достигается тем, что известный привод перемещения подвижного органа станка, содержащий основной ходовой винт, расположенный в опорах, механизм его вращения и кинематически связанное с основным ходовым винтом колесо, согласно изобретению привод снабжен дополнительным ходовым винтом с механизмом его вращения, кинематически связанным с основным ходовым винтом посредством указанного колеса, на оси которого расположен подвижный орган станка, при этом колесо установлено с возможностью перемещения вдоль осей ходовых винтов, при этом колесо выполнено червячным или косозубым, а при выполнении ходовых винтов в виде червяков, они соединены между собой червячным колесом.
Предложенный привод для перемещения подвижного органа станка имеет отличия от прототипа в существенных признаках:
- привод снабжен дополнительным ходовым винтом с механизмом его вращения, кинематически связанным с основным ходовым винтом посредством указанного колеса;
- на оси колеса расположен подвижный орган станка;
- колесо установлено с возможностью перемещения вдоль осей ходовых винтов;
- колесо выполнено червячным или косозубым;
- ходовые винты выполнены в виде червяков и соединены между собой червячным колесом.
Следовательно, предложенное решение соответствует критерию "новизна".
Введение в конструкцию привода дополнительного ходового винта с механизмом его вращения, кинематически связанного с основным ходовым винтом посредством указанного колеса, на оси которого расположен подвижный орган станка, при этом колесо установлено с возможностью перемещения вдоль осей ходовых винтов, причем при выполнении колеса червячным или косозубым, или выполнении ходовых винтов в виде червяков и соединении их посредством червячного колеса, позволит обеспечить вращение обоих ходовых винтов как с равными, так и с различными скоростями по абсолютной величине и направлению вращения (в одну и разные стороны) соответственно, при этом получить различные скорости перемещения подвижного органа станка, тем самым расширить диапазон скоростей, что важно при обработке деталей с различными технологическими особенностями.
В предложенном решении все отличительные признаки взаимосвязаны и в сочетании с другими признаками позволяют получить новый технический результат: широкий диапазон скоростей перемещения подвижного органа станка.
Следовательно, предложенное решение соответствует критерию "изобретательский уровень".
Изображение поясняется чертежом, где изображена кинематическая схема предлагаемого привода.
Привод для перемещения подвижного органа станка содержит основной ходовой винт 1, расположенный в опорах 2, электродвигатель 3 вращения ходового винта 1, дополнительный ходовой винт 4, расположенный в опорах 5, электродвигатель 6 вращения дополнительного ходового винта 4, кинематически связанного с основным ходовым винтом 1 посредством колеса 7, на оси 8 которого установлен перемещаемый подвижный орган (на чертеже не показан). Колесо 7 выполнено червячным или косозубым, а при выполнении ходовых винтов в виде червяков, они соединены между собой червячным колесом.
Каждый ходовой винт снабжен датчиками 9 и 10 обратной связи по скорости.
Привод работает следующим образом. При включении электродвигателей 3 и 6 начинают вращаться ходовые винты 1 и 4, независимое вращение которых преобразуется в результирующее поступательное движение перемещаемого подвижного органа станка, путем вращения колеса 7 и его перемещения вдоль осей ходовых винтов 1 и 4.
Изменение скоростей перемещения подвижного органа станка производится путем получения следующих режимов работы:
- вращение ходовых винтов в одну сторону с равными скоростями вращения;
- вращение ходовых винтов в одну сторону с различными скоростями вращения;
- вращение ходовых винтов в разные стороны с равными скоростями вращения;
- вращение ходовых винтов в разные стороны с различными скоростями вращения.
Установленные на ходовых винтах датчики 9 и 10 обратной связи по скорости вращения определяют ее абсолютное значение, которое используется для определения линейной скорости перемещения подвижного органа станка.
Применение изобретения позволит расширить диапазон скоростей перемещения подвижного органа стенка, увеличить производительность труда и точность позиционирования, упростить конструкцию привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2162527C1 |
| Зубофрезерный станок | 1985 |
|
SU1255316A1 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ КИНЕМАТИЧЕСКОЙ ЦЕПИ ТОКАРНО-ВИНТОРЕЗНОГО СТАНКА | 1994 |
|
RU2069605C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ ЦИКЛОИДАЛЬНОГО ПРОФИЛЯ ЗУБА ПРЯМО- И КОСОЗУБЫХ ЦИЛИНДРИЧЕСКИХ ЦИКЛОИДАЛЬНЫХ ЗУБЧАТЫХ КОЛЕС | 2018 |
|
RU2688114C1 |
| Копировальный станок | 1979 |
|
SU795898A1 |
| СООСНАЯ НЕСУЩАЯ СИСТЕМА | 2009 |
|
RU2412081C1 |
| Зубофрезерный станок для нарезания колес с криволинейными по длине зубьями | 1987 |
|
SU1710228A1 |
| Двухместное захватное устройство | 1986 |
|
SU1316815A1 |
| Червячно-цилиндрическая передача | 1980 |
|
SU918599A1 |
Изобретение относится к области станкостроения и может быть использовано в приводах, где требуется возвратно-поступательное перемещение исполнительных механизмов. Привод перемещения подвижного органа станка содержит основной ходовой винт, расположенный в опорах, механизм его вращения, дополнительный ходовой винт, кинематически связанный с основным ходовым винтом посредством колеса, на оси которого расположен подвижный орган станка. Колесо выполнено червячным или косозубым, а при выполнении ходовых винтов в виде червяков они соединены между собой червячным колесом. Технический результат выражается в обеспечении возможности сообщения подвижному органу станка широкого диапазона скоростей. 2 з.п. ф-лы, 1 ил.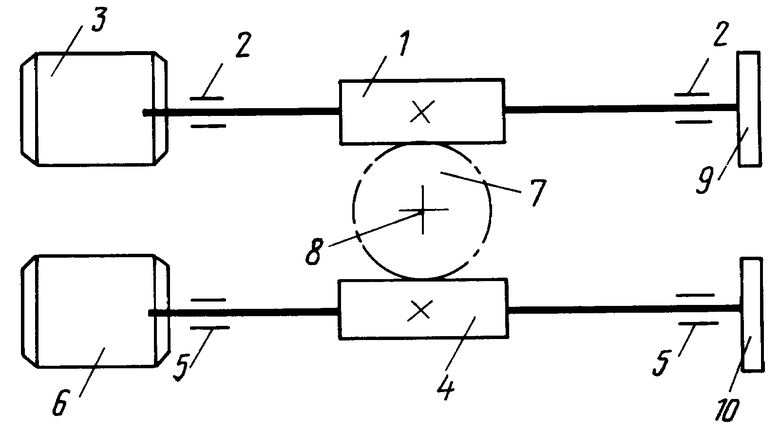
| Счетчик-делитель | 1988 |
|
SU1529446A1 |
| FR 2055490 A, 07.05.71 | |||
| ЧУГУН | 2009 |
|
RU2397267C1 |
| Клеть для точной прокатки | 1974 |
|
SU561579A1 |
| Привод размерных перемещений | 1973 |
|
SU450693A1 |

