1
Изобретение относится к хо-П лодной обработке металлов и может быть использовано при проектировании и модернизации металлорежущих станков с числовым программным управлением, преимущественно токарного типа.
В настоящее время для перемещения исполнительных органов станков с проградамным управлением широко применяется привод с шаговым двигателем обычно в сочетании с гидроусилителем крутящего момента. Этот привод осуществляет рабочие и ускоренные холостые перемещения, причем наличие требует значительного расширения диапазона регулирования приводи, а часто и более высокой модности. При этом целесообразно использование отдель него привода более простого вида, например асинхронного двигателя, с возложением на шаговый двигатель только функций отработки рабочих перемещений. Обязательным условием использования второго двигателя является отсутствие потерь информации о перемещении при перекл1ь чении управления двигателями с одного из них на .
Известны устройства, где шаговый двигатель кинематически связан с блоком переключения отсчета с абсолютного измерения па измерение в приращениях, однако это устройство не обеспечивает возможности перевода управления с одного двигателя на другой при отработке программ, включающих контурные перемещения.
Предавгаемое устройство отличается тем, что в него введен датчик критического значения частоты или скорости, выход с которого связан с блоком переключения двигателей.
Это позволяет переключать в момент, заданный датчиком скорости привод с одного двигателя на другой с результирующим повышением
производительности станка.
Цель изобретения расширение области применения привода размерных перемещений.
Для этого на валу асинхронного двигателя установлен датчик, выход которого соединен со входом блока переключения двигателей.
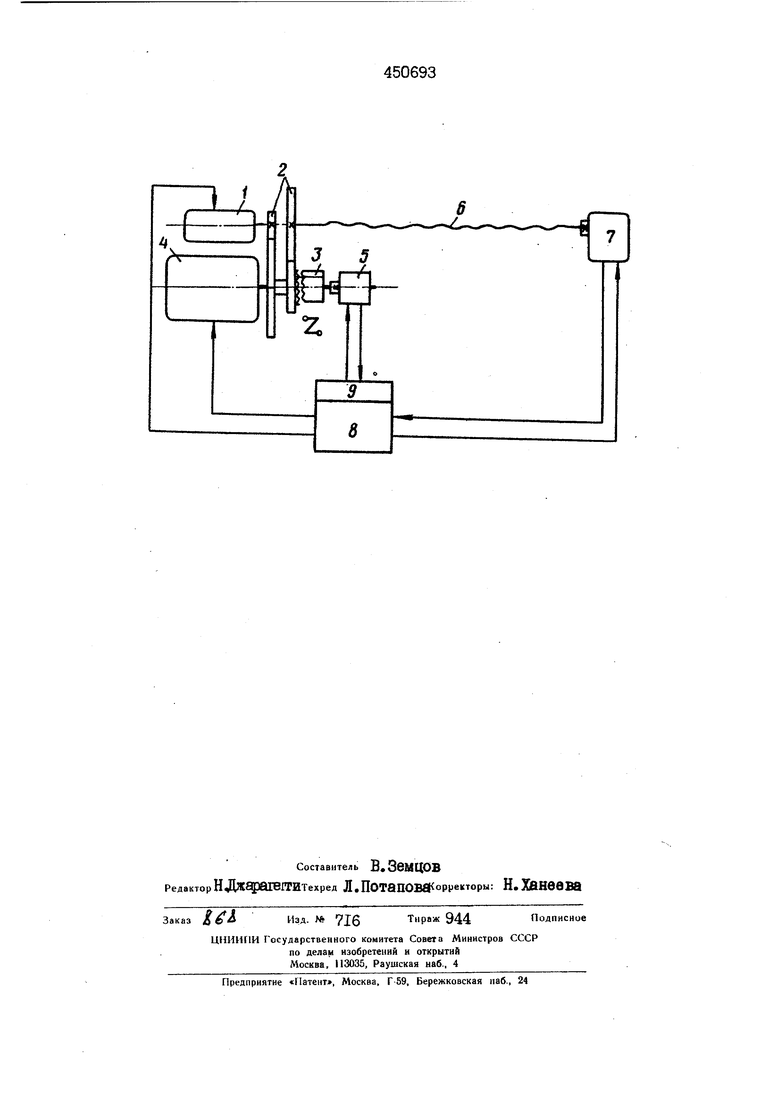
На чертеже приведена струкщшая компановка привода и его
связи с блоком программного управления.
Привод включает шаговый двигатель I, кинематически соединенный через зубчатую передачу 2 и быстродействующую муфту 3 с асинхронншл двигателем быстрых перемещеш1й 4, вал которого связан с датч1п ом скорости 5. Выходной вал привода связан через ходовой винт 6 с блоком переключения отсчета 7 который обеспечивает совместно с блоком программного управления 8 и входящим в него блоком переключения двигателей 9 отсчет перемещений без потерь ишТ:о.рмации при временном отк;шчении шагового двигателя.
Привод работает следующим образом. Шаговый двигатель 1, через зубчатую передачу 2 вращает ходовое винт 6, сообщая исполнительному органу сташа перемещение, заданное блоком программного управления 8, выполняемое на скорости одной из рабочих подач. Наибольшая скорость перемещения не может превышать в этом случае определяемого характеристикой шагового даигателя.
При выполнении ускоренного холостого перемещения со скоростью, значительно большей, по срав нению с той, которую мог оы обеспечить шаговый двигатель, соответствующее питание подается на двигатаяь 4 и одновременно включается муфта 3. Шаговый двигатель остается обесточенным, но благодаря наличию кинематической связи продолжает вращаться вхолостую с повышенным числом оборотов. Незадолго до конца отработки заданного перемещения подается коменда на перевод двигателя 4 в режим торможения и его скорость начинает быстро падать. Когда она достигает значения, на которое настроен датчик 5, по выдаваемой им сигналу совпадения по.дключается питание ша
гового двигателя, а муфта 3 отключается. Скорость вращения шагового двигателя также равна в этом случае скорости, на которую настро ен датчик, поэтому шаговый двигатель достаточно плавно подхватывает привод и отрабатывает оставщуюся часть перемещения с максимальной, допускаемой его характеристикой скоростью (обычно соответствущей частоте 2рООгц) и с
мгновенным сбросом скорости при позиционировании.
ПРЩ1/1ЕГ ИЗОБРЕГЕНЖ
Привод размерных перемещений для металлорежущих станков, содержащий блок прог1раммного управления, соединенный с шаговым, двигателем, выходной вал которого кинематически связан с блоком переключения отсчета, асинхронный двигатель и блок переключения
двигателей, отличающийс я тем, что, с целью расширения области применения, на валу асинхронного двигателя установлен датчик скорости, выход которого соединен со входом блока переключения двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1971 |
|
SU319382A1 |
| Устройство для кинематического программного управления металлорежущими станками | 1960 |
|
SU147419A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯСТАНКАМИ | 1971 |
|
SU319926A1 |
| Стенд для испытания интеллектуальной системы адаптивного управления процессом резания на металлорежущих станках со шпиндельным узлом с активными магнитными подшипниками | 2015 |
|
RU2690625C2 |
| аСЕС©Юч1НАЯ | 1973 |
|
SU367198A1 |
| Устройство для измерения угла поворота вала | 1957 |
|
SU126930A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| СПОСОБ ЗАДАНИЯ ПЕРЕМЕЩЕНИЙ ИСПОЛНИТЕЛЬНОМУ ОРГАНУ МЕТАЛЛОРЕЖУЩЕГО СТАНКА С СИСТЕМОЙ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU408707A1 |
| Электромеханическая следящая система для копировальных станков | 1961 |
|
SU142125A1 |
| Барабанно-лопастная погрузочная машина | 1981 |
|
SU1041705A1 |