Изобретение относится к устройствам преимущественно железнодорожного пути и предназначено для использования в стрелочных переводах для перемещения и фиксации рельсовых элементов в их служебных положениях.
Все известные механизмы поименованной назначенности не позволяют эффективно использовать типовые приводы стрелочных переводов вследствие неоднозначности и дефицита величины перемещения (шага) рабочего органа (шибера) и дефицита тягового усилия привода, особенно когда это касается перемещения двух и более рельсовых элементов с их изгибом (см. с. 60, рис. 5.1 "Стрелочный электропривод СП-6", Э.Е.Асс, А.Я. Гончаров, "Строительство устройств железнодорожной автоматики и телемеханики", М., "Транспорт", 1985 г. ).
Известен механизм, содержащий три части: приводную тягу, рельсовую тягу, направляющую тяги, упор одной из тяг, паз под упор в направляющей тяги (см. а.с. СССР N 1289937 по кл. E 01 B 7/00 за 1984 г.).
Указанный механизм не может быть использован с приводом, неоднозначность шага перемещения рабочего органа которого превышает нормативно допустимую погрешность в стыковке рельсов (± 1 мм).
Известен механизм, содержащий три части: приводную тягу, рельсовую тягу, направляющую тяги, упор одной из тяг и паз под упор в направляющей тяге, при этом одна из тяг снабжена скрепленной с нею осью, расположенной в фигурном пазе другой части, содержащем линейные участки (см. а.с. СССР N 1661255 по кл. E 01 B 23/16 за 1985 г.).
Недостатком указанного механизма является неоднозначность положения оси в фигурном пазе при перемещении рельса вследствие зависимости положения оси от переменной силы сопротивления рельса перемещению, что не исключает возможность возникновения больших напряжений и сил трения в механизме, снижающих коэффициент использования тягового усилия привода.
Известен механизм нежесткой связи приводной тяги и рельса с большим значением коэффициента использования тягового усилия привода.
Таковым является механизм, содержащий три части: приводную тягу, рельсовую тягу, направляющую тяги, упор одной из тяг, паз под упор в направляющей тяги, ось, скрепленную с одной из тяг и расположенную в фигурном пазе другой части, содержащем линейные участки, при этом пара линейных участков образуют Г-образный полупаз, концевые участки которых в пазу расположены предпочтительно параллельно (см. а.с. СССР N 1134654 по кл. E 01 B 7/02; B 61 L 5/02 за 1983 г.).
Указанный механизм, имея высокий коэффициент использования тягового усилия привода, требует привода, шаг рабочего органа которого должен быть больше шага перемещения рельса на величину, почти равную двум проекциям фигурного паза на продольную ось тяги.
Заявляемое изобретение разрешает задачу комплексного аккумулирования положительных результатов известных механизмов, в том числе: высокий коэффициент использования тягового усилия привода, независимость работы механизма от неоднозначности шага перемещения рабочего органа привода, минимальность потребного шага перемещения рабочего органа привода.
Поставленная задача в механизме, содержащем три части: приводную тягу, рельсовую тягу, направляющую тяги, упор одной из тяг, паз под упор в направляющей тяги, ось, скрепленную с одной из тяг и расположенную в фигурном пазе другой части, содержащем Г-образные полупазы, концевые участки которых в пазу расположены предпочтительно параллельно, разрешается тем, что форма фигурного  и V-образного паза выполнена приблизительно соответствующей теоретической траектории относительного взаимоперемещения центра оси и паза по сопряженным радиуса оси дугам двум и четырем соответственно, сопряженным с концевыми прямыми отрезками.
и V-образного паза выполнена приблизительно соответствующей теоретической траектории относительного взаимоперемещения центра оси и паза по сопряженным радиуса оси дугам двум и четырем соответственно, сопряженным с концевыми прямыми отрезками.
На фиг. 1 - 7 изображены принципиальные схемы паза и конструкции механизма.
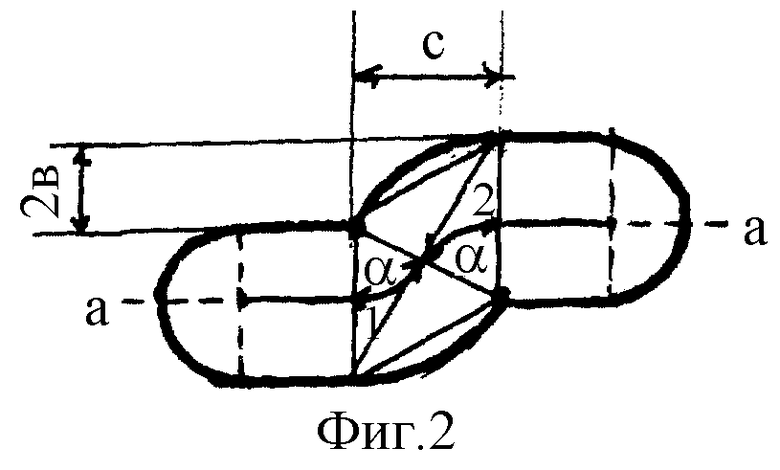
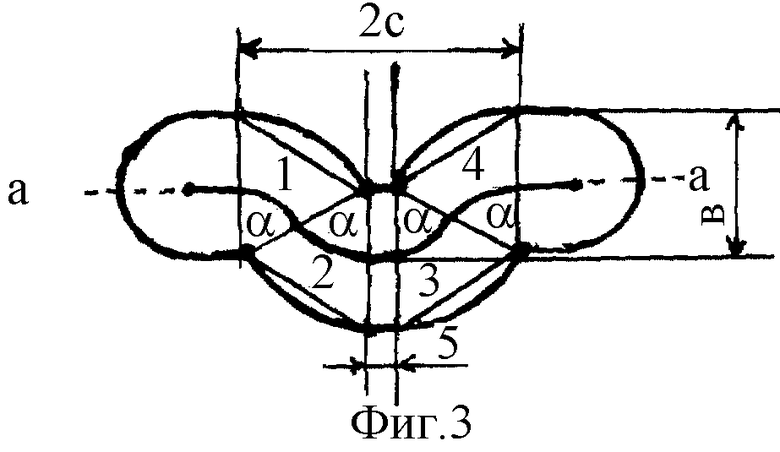
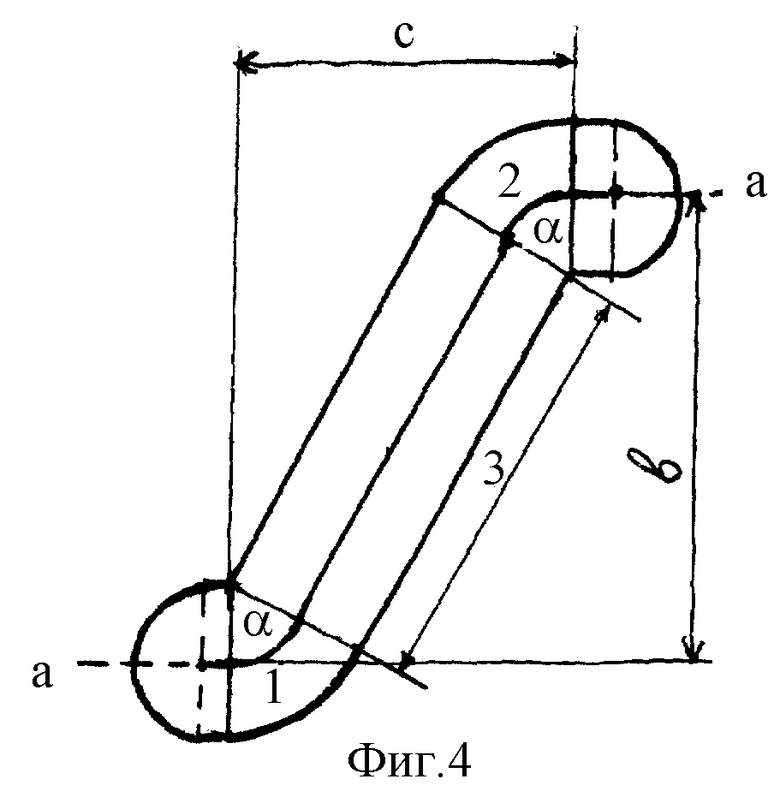
На фиг. 1 V-образный паз; на фиг. 2 -  -образный паз; на фиг. 3 - V-образный паз со вставкой; на фиг. 4 -
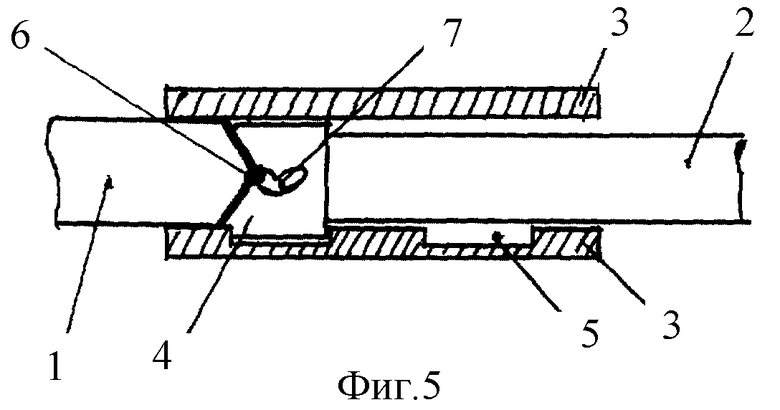
-образный паз; на фиг. 3 - V-образный паз со вставкой; на фиг. 4 -  -образный паз со вставкой; на фиг. 5 - механизм с V-образным пазом; на фиг. 6 - механизм с
-образный паз со вставкой; на фиг. 5 - механизм с V-образным пазом; на фиг. 6 - механизм с  -образным пазом; на фиг. 7 механизм с
-образным пазом; на фиг. 7 механизм с  -образным пазом со вставкой.
-образным пазом со вставкой.
Графической основой  -образного паза является один параллелограмм, меньшая диагональ которого равна стороне параллелограмма, равной диаметру оси, а основой V-образного паза - два параллелограмма. Вставки пазов - в простейшем случае - прямоугольники.
-образного паза является один параллелограмм, меньшая диагональ которого равна стороне параллелограмма, равной диаметру оси, а основой V-образного паза - два параллелограмма. Вставки пазов - в простейшем случае - прямоугольники.
На фиг. 1 - 4 линии, индексированные "a" - теоретические траектории взаимоперемещения оси и фигурного паза; дуговые радиуса оси части траектории, индексированные цифрами 1-2 вставкой 3 или без нее, образуют полуволну, а индексированные цифрами 1-4 со вставкой 5 или без нее - образуют волну; отрезки прямых, индексированные "c", есть максимальные длины взаимоперемещений оси и фигурного паза для ввода или вывода упора рельсовой тяги (условно принимается такое однозначное соответствие тяги) на максимальную глубину "b" в паз под упор; углы, индексированные α являются углами взаиморасположения оси, скрепленной с приводной тягой (условно принимается такое однозначное соответствие), в начальный момент взаимоотклонения оси приводной тяги и рельсовой тяги и в фазе продольного перемещения и приводной и рельсовой тяг.
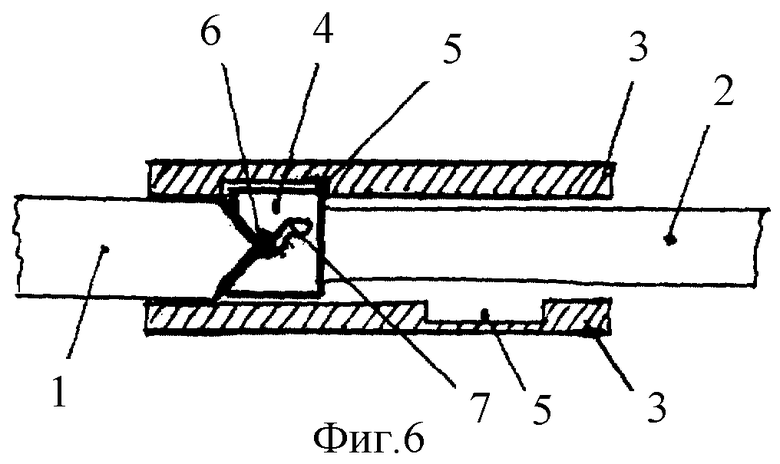
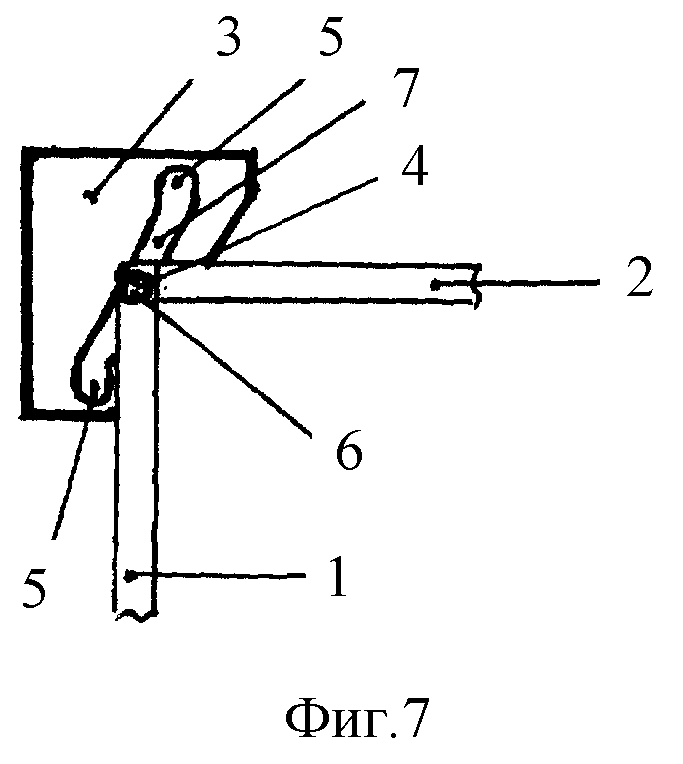
Механизм содержит (см. фиг. 5 - 7) три части: приводную тягу 1, рельсовую тягу 2, направляющую тяги 3, упор 4 тяги 2, паз 5 в направляющей 3 под упор 4, ось 6, скрепленную с тягой 1 и расположенную в фигурном пазе 7, выполненном не в тяге 1, а в другой части механизма: в рельсовой тяге 2 (фиг. 5 - 6), в направляющей тяги 3 (фиг. 7). Тяга 1 в идеальном случае ограничена направляющей тяги 3 от поперечных перемещений.
Работает механизм следующим образом.
При перемещении тяги 1 в направляющей тяги 3, скрепленной с подрельсовым основанием (на фиг. не показано), ось 6 перемещается по отрезку прямой (фиг. 5 - 6), выводя упор 4 тяги 2 из паза 5 и далее, перемещая тягу 2 вдоль ее оси до момента совпадения положений упора 4 и другого паза 5 в направляющей тяги 3, когда упор 4 входит в паз 5, чем и фиксируется положение тяги 2, что соответствует и фиксации рельса.
Тяга 1 может перемещаться дальше в случае ее избыточного хода, поскольку ось 6 может перемещаться по концевому участку паза 7. При обратном движении приводной тяги 7 все происходит в той же последовательности.
При перемещении тяги (фиг. 7) в направляющей тяги 3, скрепленной с подрельсовым основанием (на фиг. не показано), ось 6 перемещается первоначально (в случае избыточного хода тяги 1) по прямой линии концевого участка  -образного паза 7 (с "гипертрофированной" вставкой), перемещая и примыкающий к ней конец тяги 2, чему соответствует очень малое (на порядок ниже) смещение другого конца тяги 2, а при перемещении по вставке
-образного паза 7 (с "гипертрофированной" вставкой), перемещая и примыкающий к ней конец тяги 2, чему соответствует очень малое (на порядок ниже) смещение другого конца тяги 2, а при перемещении по вставке  -образного паза происходит смещение этого конца в меру угла α В конечные моменты движения оси 6 в концевом участке паза 7 снова имеет место очень малое смещение другого конца тяги 2. Таким образом, смещению другого конца тяги 2 соответствует смещение рельса, а положение оси 6 в концевом участке паза 7 определяет фиксацию примыкающего к оси 6 конца тяги 2 и тем самым определяет фиксацию и рельса. При обратном движении приводной тяги 1 все происходит в той же последовательности.
-образного паза происходит смещение этого конца в меру угла α В конечные моменты движения оси 6 в концевом участке паза 7 снова имеет место очень малое смещение другого конца тяги 2. Таким образом, смещению другого конца тяги 2 соответствует смещение рельса, а положение оси 6 в концевом участке паза 7 определяет фиксацию примыкающего к оси 6 конца тяги 2 и тем самым определяет фиксацию и рельса. При обратном движении приводной тяги 1 все происходит в той же последовательности.
Охарактеризованная форма паза и механизм позволяет минимизировать часть хода приводной тяги 1 на ввод или вывод из "мертвой" точки, соответствующей фиксации рельса, упора 6 из паза под упор 4; компромиссно выбрать оптимальный угол α (фиг. 1-2) для уменьшения силы трения в механизме и тем самым увеличения коэффициента использования тяги привода, удовлетворить условиям точной установки рельса при неоднозначности шага перемещения тяги 1 (рабочего органа привода).
При этом имеется многовариантная возможность компоновки механизма с самим стрелочным переводом, поскольку можно варьировать плоскости расположения механизма, менять местами части направляющей тяги 3, содержащей и не содержащей пазы 5 (фиг. 6) в соответствии с условиями компоновки или условиями эксплуатации (в целях снижения загрязнения механизма).
| название | год | авторы | номер документа |
|---|---|---|---|
| Стрелочный перевод | 1983 |
|
SU1134654A1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД | 1996 |
|
RU2129183C1 |
| Стрелочный перевод | 1985 |
|
SU1661256A1 |
| Привод стрелочного перевода | 1985 |
|
SU1425122A1 |
| Скоростной стрелочный перевод Рекунова | 2024 |
|
RU2836062C1 |
| Стрелочный перевод | 1984 |
|
SU1289937A1 |
| БОКОВОЙ УПОР РЕЛЬСОВОГО СКРЕПЛЕНИЯ ДЛЯ СТРЕЛОЧНЫХ ПЕРЕВОДОВ НА ЖЕЛЕЗОБЕТОННОМ ОСНОВАНИИ И СПОСОБ РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ РЕЛЬСОВ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ В СТРЕЛОЧНЫХ ПЕРЕВОДАХ С ЕГО ПОМОЩЬЮ | 2023 |
|
RU2815139C1 |
| Безостряковый стрелочный перевод | 1984 |
|
SU1289939A1 |
| Железнодорожная стрелка | 1984 |
|
SU1194939A1 |
| Рельсовое скрепление | 2022 |
|
RU2795711C1 |
Изобретение относится к устройствам железнодорожного пути. Механизм содержит приводную тягу, рельсовую тягу, скрепленную с подрельсовым основанием направляющую, упор на одной из тяг, пазы под упор в направляющей, ось для соединения рельсовой тяги и приводной тяги, фигурный паз, концевые участки которого предназначены для фиксации. Каждый из концов фигурного паза выполнен по дуге для перемещения оси так, чтобы ввести указанный упор в паз направляющей для фиксации приводной тяги. Изобретение направлено на повышение независимости работы механизма от неоднозначности шага перемещения рабочего органа привода. 1 з.п.ф-лы., 7 ил.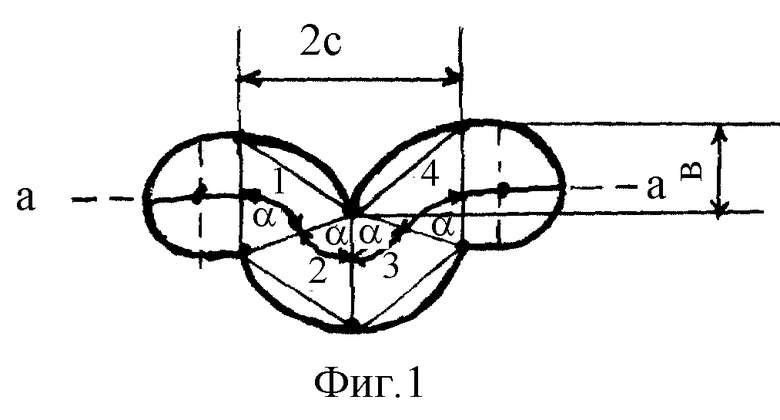
| Стрелочный перевод | 1983 |
|
SU1134654A1 |
| Стрелочный перевод | 1984 |
|
SU1289937A1 |
| US 4842225 А, 04.06.89 | |||
| DE 3115943 А1, 16.09.82 | |||
| 0 |
|
SU156351A1 | |
