Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая рулевой привод (РП), гироскоп инерциальный и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход с входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы головки самонаведения "-Y" и "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z" и "-Z" соединены с входами третьего и четвертого усилителей мощности соответственно, выхода усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры.
Существенным недостатком данной системы является то, что ГСН имеет жесткую пеленгационную характеристику, т.е. зависимость длительности выходных команд по каналам +Y, -Y и +Z, -Z в зависимости от скорости слежения (1)
(1)
где τ - длительность формируемой команды угловая скорость линии визирования
угловая скорость линии визирования
При этом изменить зависимость этой характеристики, заложенную на этапе разработки ГСН нельзя. Управляемые же снаряды или ракеты используют в качестве аэродинамических органов управления различные рулевые привода, в частности, например, воздушно-динамический рулевой привод, у которого время движения рулей из нулевого положения на упор и обратно может превышать длительность минимальных команд, вырабатываемых ГСН. Это приводит к потере коэффициента команды и к уменьшению управляющей перегрузки, что снижает точность наведения.
Задачей настоящего предложения является повышение точности наведения системы.
Поставленная задача достигается тем, что в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход с входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выхода первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры, введены первый, второй, третий и четвертый расширители импульсов, причем выходы головки самонаведения "-Y", "+Y", "+Z" и "-Z" соединены с входами первого, второго, третьего и четвертого расширителей импульсов, а выходы первого и второго расширителей импульсов соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы третьего и четвертого расширителей импульсов соединены с входами третьего и четвертого усилителей мощности соответственно.
На фиг. 1 показаны длительности команд формируемых головкой самонаведения, и отработка этих команд рулевым приводом. При этом потери коэффициента команды определяются отношением
K=S1/S2, (2)
где S1 = t1•σm , t1- длительность команды;
σm - амплитуда отклонения рулей;
S2 = t2•σ, t2 - время движения рулей под действием команды;
σ - средний угол отклонения рулей под действием команды.
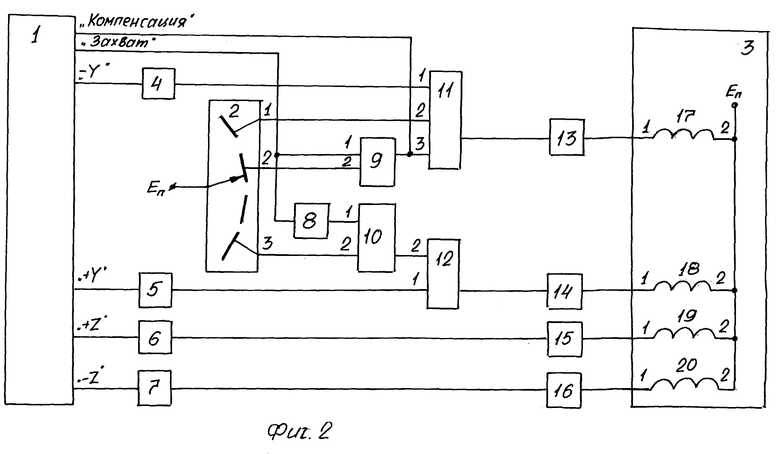
Из фиг. 1 видно, что на участке траектории, когда ошибка наведения минимальна и ГСН формирует минимальные по длительности команды, система становится нечувствительна к входным сигналам, что приводит к увеличению величины промаха. На фиг. 2 приведена структурная схема системы наведения.
Система наведения состоит из головки самонаведения 1, гироскопа инерциального 2, рулевого привода 3, первого 4, второго 5, третьего 6 и четвертого 7 расширителей импульсов, элементов НЕ- 8, первого и второго И-9 и 10 соответственно, первого и второго ИЛИ -11 и 12 соответственно, первого 13, второго 14, третьего 15 и четвертого 16 усилителей мощности, первой, второй, третьей и четвертой обмоток управления 17, 18, 19 и 20 соответственно.
Причем выход "Захват" головки самонаведения 1 соединен с первым входом первого элемента И 9 и через инвертор 8 с первым входом второго элемента И 10, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального 2, выход первого элемента И 9 соединен с входом "Компенсация" ГСН 1 и с третьим входом первого элемента ИЛИ 11, второй вход которого соединен с первым выходом гироскопа инерциального 2, а выход с входом первого усилителя мощности 13, выход второго элемента И 10 соединен со вторым входом второго элемента ИЛИ 12, выход второго элемента ИЛИ 12 соединен с входом второго усилителя мощности 14, выхода первого 13, второго 14, третьего 15 и четвертого 16 усилителей мощности соединены соответственно с первыми входами первой 17, второй 18, третьей 19 и четвертой 20 обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального 2 и источником питания бортовой аппаратуры, выходы головки самонаведения 1 "-Y", "+Y", "+Z" и "-Z" соединены с входами первого 4, второго 5, третьего 6 и четвертого 7 расширителей импульсов, а выходы первого 4 и второго 5 расширителей импульсов соединены с первыми входами первого 11 и второго 12 элементов ИЛИ соответственно, выходы третьего 6 и четвертого 7 расширителей импульсов соединены с входами третьего 15 и четвертого 16 усилителей мощности соответственно.
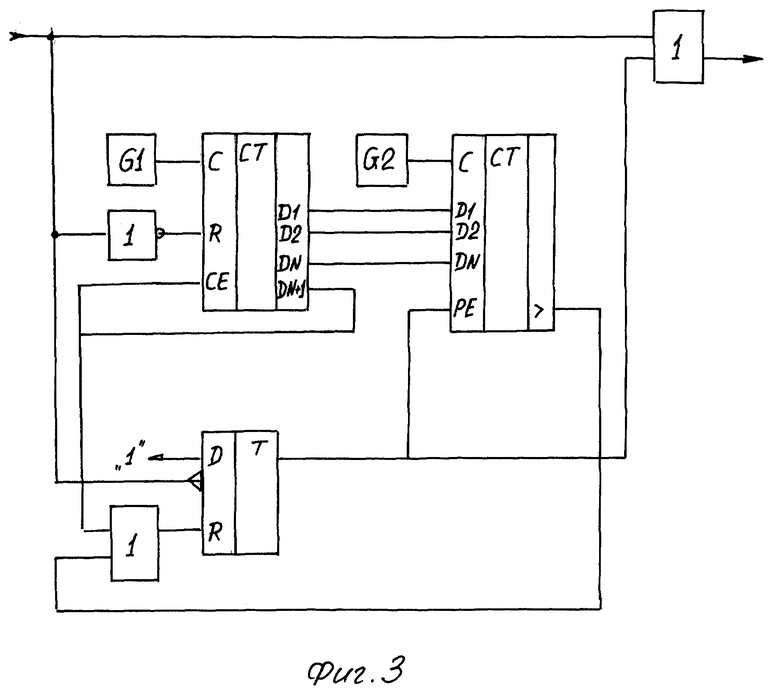
Головка самонаведения 1 и гироскоп инерциальный 2 могут быть выполнены как в прототипе, в качестве рулевого привода 3 может быть использован воздушно-динамический рулевой привод, первый 4, второй 5, третий 6 и четвертый 7 расширители импульсов могут быть выполнены по структурной схеме, приведенной на фиг. 3, элементы НЕ 8, И 9 и 10, ИЛИ 11 и 12 могут быть выполнены на микросхемах серии 561, см. В.Л.Шило "Популярные цифровые микросхемы". М., "Радио и связь" 1987 г.
Работает система следующим образом.
При выстреливании снаряда от бойка орудия воспламеняется метательный заряд и под действием давления газов снаряд выстреливается из орудия.
В определенный момент времени разарретируется и раскручивается ротор гироскопа инерциального 2, выходят на режим батареи питания бортовой аппаратуры и головки самонаведения 1, отделяется блок носовой, открывается входной зрачок ГСН.
После разгона ротора ГИ (гироскопа инерциального) последний приобретает гироскопические свойства и его главная ось запоминает положение продольной оси снарядов в момент разарретирования.
При подлете снаряда к цели и. при приеме отраженных от цели импульсов лазерного излучения ГСН осуществляет захват цели. После раскрутки ротора ГСН формирует сигнал "Захват", который, поступая на первый вход первого элемента И, разрешает проход импульсов со второго (5) выхода ГИ на первую обмотку рулевого привода и в головку самонаведения 1, т.о. происходит компенсация влияния силы тяжести на участке самонаведения.
ГСН начинает вырабатывать управляющие импульсы по выходам "+Y", "-Y", "+Z", "-Z". В начальный момент, когда начальное угловое рассогласование оптической оси ГСН с направлением на цель максимально, ГСН выдает максимальные по длительности команды и они, поступая на расширители импульсов, проходят через них без изменения и далее поступают на усилители мощности по каналам "+Y" и "-Y", проходя через первую и вторую схемы ИЛИ, и каналам +Z и -Z на обмотки управления РП, что приводит к отклонению рулей РП и, следовательно, к уменьшению углового рассогласования оптической оси ГСН с направлением на цель. В процессе уменьшения этой ошибки команды по выходам ГСН уменьшаются по длительности. И в тот момент, когда их длительность становится меньше времени срабатывания РП, расширители импульсов начинают их расширение до величины, при которой потери коэффициента команды, определяемые выражением (2), близки к 1.
Т.о., при поступлении с ГСН коротких команд на РП проходят команды, длительность которых позволяет уменьшить потери коэффициента команды, увеличить величину управляющей перегрузки и повысить тем самым точность системы наведения.
Источники информации
1. "152-мм выстрел 3ВОФ64(3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 и зарядом N 1 (Уменьшенным переменным зарядом). Техническое описание и инструкции по эксплуатации 3ВОФ64.00.00.000ТО (3ВОФ93.00.00.000ТО)". Москва. Военное издательство. 1990 г., стр. 59-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224972C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Техническим результатом изобретения является повышение точности наведения системы. Сущность изобретения: система наведения управляемого снаряда содержит рулевой привод, гироскоп инерциальный и головку самонаведения, выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход с входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры. Дополнительно в систему введены первый, второй, третий и четвертый расширители импульсов, причем выходы головки самонаведения -Y, +Y, +Z и -Z соединены с входами первого, второго, третьего и четвертого расширителей импульсов, а выходы первого и второго расширителей импульсов соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы третьего и четвертого расширителей импульсов соединены с входами третьего и четвертого усилителей мощности соответственно, причем длительность формируемых расширителями импульсов строго связана с длительностями команд, формируемых головкой самонаведения. 3 ил.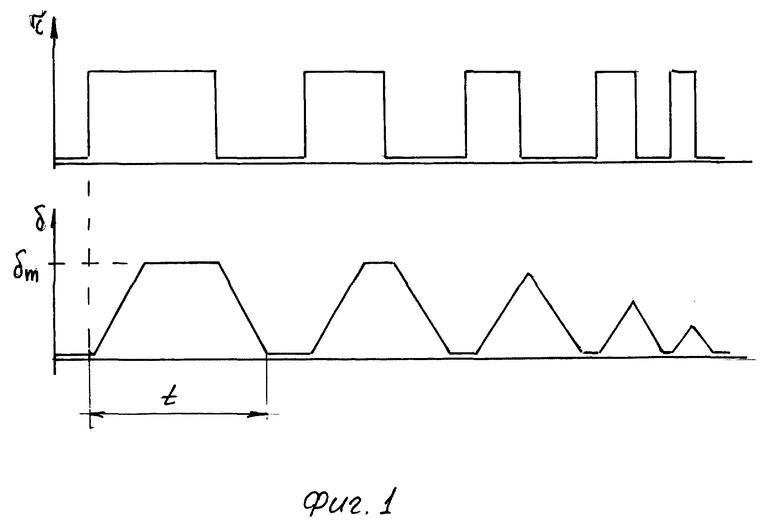
Система наведения управляемого снаряда, содержащая рулевой привод, гироскоп инерциальный и головку самонаведения (ГСН), выход "Захват" которой соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно с вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен с входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а выход с входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход второго элемента ИЛИ соединен с входом второго усилителя мощности, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, вторые входы которых соединены с четвертым входом гироскопа инерциального и источником питания бортовой аппаратуры, отличающаяся тем, что в нее введены первый, второй, третий и четвертый расширители импульсов, причем, выходы головки самонаведения -Y, +Y, +Z и -Z соединены с входами первого, второго, третьего и четвертого расширителей импульсов, а выходы первого и второго расширителей импульсов соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы третьего и четвертого расширителей импульсов соединены с входами третьего и четвертого усилителей мощности соответственно.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| - М.: Военное издательство, 1990, с.59-64 | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ КЛАССА "ВОЗДУХ-ВОЗДУХ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2099665C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| СПОСОБ НЕПРЕРЫВНОГО ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКИХ ТРУБ С ПОЛИМЕРНЫМ ПОКРЫТИЕМ | 1997 |
|
RU2126322C1 |
| US 4606514 A, 19.08.86 | |||
| US 5279478 A, 18.01.94 | |||
| DE 3643975 A1, 30.06.88. | |||

