Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения.
Известна система наведения управляемого снаряда [1], содержащая рулевой привод (РП), гироскоп инерциальный (ГИ), переключатель режимов и головку самонаведения (ГСН), включающую функциональные элементы, в том числе элемент ИЛИ с соответствующими связями, выход "Захват" головки самонаведения соединен с первым входом первого элемента И и через инвертор - с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" ГСН и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы головки самонаведения "-Y", "+Y" соединены с первыми входами первого и второго элементов ИЛИ соответственно, выходы головки самонаведения "+Z", "-Z" соединены с первыми входами третьего и четвертого элементов И, выходы третьего и четвертого элементов И соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, а вторые входы обмоток управления, вход гироскопа инерциального и вход переключателя режимов соединены с источником питания бортовой аппаратуры.
Существенным недостатком данной системы является недостаточная точность наведения при стрельбе на ближней зоне. Это связано с тем, что во избежание колебаний снаряда при стрельбе на ближней зоне при отработке начального рассогласования с помощью переключателя К1 отключается канал курса ±Z, a управление ведется только каналом ±Y. Однако управление одним каналом позволяет снизить колебания снаряда только при небольших угловых скоростях его вращения. Это объясняется следующим.
При одноканальном управлении, например, по методу пропорциональной навигации, используемому в прототипе, управляющий сигнал Uy'(t) в одном из каналов управления вращающимся снарядом имеет следующий вид:
а угол отклонения рулей  соответственно:
соответственно:
где Т - период следования импульсов подсвета (для частоты подсвета, например, 
 длительность импульсов подсвета;
длительность импульсов подсвета; амплитуда угловой скорости линии визирования цели;
амплитуда угловой скорости линии визирования цели; фаза угловой скорости линии визирования цели;
фаза угловой скорости линии визирования цели; величина линейной зоны головки самонаведения по угловой скорости линии визирования цели, при которой управляющий сигнал, формируемый головкой самонаведения, достигает максимального значения;
величина линейной зоны головки самонаведения по угловой скорости линии визирования цели, при которой управляющий сигнал, формируемый головкой самонаведения, достигает максимального значения; угловая скорость вращения снаряда;
угловая скорость вращения снаряда;
k1 - коэффициент пропорциональности рулевого привода, определяемый при моделировании.
При этом первая гармоника сигнала  представляющего собой последовательность импульсов единичной амплитуды, следующих на частоте f0=20 Гц, может быть выражена в следующем виде:
представляющего собой последовательность импульсов единичной амплитуды, следующих на частоте f0=20 Гц, может быть выражена в следующем виде:
 функция, характеризующая коэффициент использования команды.
функция, характеризующая коэффициент использования команды.
Тогда угол отклонения рулей  может быть выражен в следующем виде:
может быть выражен в следующем виде:
В проекции на неподвижную (не связанную с вращением снаряда) ось Y угол отклонения рулей будет иметь следующее выражение:
Данное выражение имеет в своем составе составляющую на частоте  а именно
а именно 
При f0= 20 Гц и  (8-9) Гц частота этой составляющей будет равняться (2-4) Гц, что соответствует или близко частотам собственных колебаний снаряда. Указанный факт приводит к недопустимо повышенным колебаниям снаряда, приводящим к снижению точности наведения системы при больших угловых скоростях вращения снаряда.
(8-9) Гц частота этой составляющей будет равняться (2-4) Гц, что соответствует или близко частотам собственных колебаний снаряда. Указанный факт приводит к недопустимо повышенным колебаниям снаряда, приводящим к снижению точности наведения системы при больших угловых скоростях вращения снаряда.
Задачей предлагаемого изобретения является повышение точности системы наведения при стрельбе по ближней зоне снарядами с различными угловыми скоростями вращения за счет использования двух каналов управления с одновременным ограничением по длительности максимальных команд, поступающих с головки самонаведения на рули по этим каналам. Это позволяет практически исключить появление колебаний снаряда, имеющего большой разброс угловых скоростей вращения при стрельбе на ближней зоне и тем самым повысить точность наведения предложенной системы.
Для достижения поставленной задачи в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный, переключатель режимов и головку самонаведения, включающую функциональные элементы, в том числе элемент ИЛИ, формирующий на своем выходе сигналы с фотоприемного устройства, выход "Захват" головки самонаведения соединен с первым входом первого элемента И и через инвертор - с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы "+Z", "-Z" головки самонаведения соединены с первыми входами третьего и четвертого элементов И соответственно, выходы третьего и четвертого элементов И соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, а вторые входы обмоток управления, вход гироскопа инерциального и вход переключателя режимов соединены с источником питания бортовой аппаратуры, введены первый и второй ждущие мультивибраторы, пятый и шестой элементы И и третий элемент ИЛИ, причем выход элемента ИЛИ головки самонаведения соединен со входом первого ждущего мультивибратора, выход которого соединен со входом второго ждущего мультивибратора, выход которого соединен с первым входом третьего элемента ИЛИ, второй вход которого соединен с выходом переключателя режимов, а выход третьего элемента ИЛИ соединен со вторыми входами третьего, четвертого, пятого и шестого элементов И, первые входы пятого и шестого элементов И соединены с выходами "-Y", "+Y" головки самонаведения соответственно, а выходы пятого и шестого элементов И соединены с первыми входами первого и второго элементов ИЛИ соответственно.
Введение в известную систему двух ждущих мультивибраторов и дополнительно двух элементов И и элемента ИЛИ с соответствующими связями обеспечило уменьшение максимальной длительности команды управления на ближней зоне с сохранением двух каналов управления, что позволило повысить точность наведения.
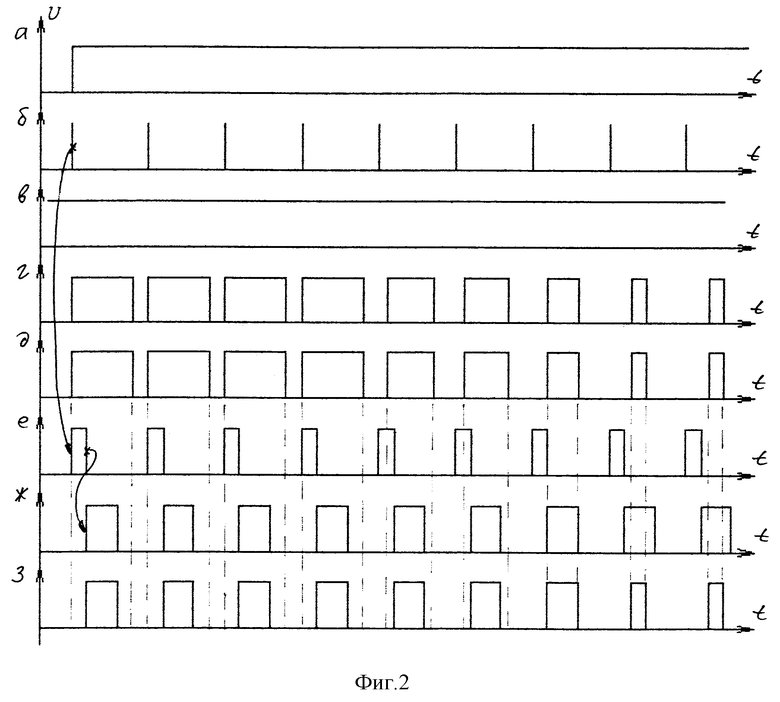
На фиг.1 приведена блок-схема предлагаемой системы, где: 1 - головка самонаведения, выполненная, например, как в прототипе, и содержащая фотоприемное устройство 25, усилители релейной и линейной следящих систем 26 и 28, пороговые устройства релейной и линейной следящих систем 27 и 34, схему ИЛИ 29, схемы суммарно-разностной обработки 30 и 33, пиковые детекторы 31, сумматор 32, селектор 35, формирователь выходных сигналов 36, схему нормирования 37, логическую схему 38, усилитель мощности 39, схему ШИМ 41, усилительно-преобразовательные элементы 40, обмотки катушек коррекции 42 и 43, обмотку компенсации силы тяжести 44 с соответствующими связями, 2 - гироскоп инерциальный с ламельным датчиком, выполненный, например, как в прототипе, 3 - рулевой привод, 4 - переключатель режимов, выполненный, например, как в прототипе, 5, 6 - первый и второй ждущие мультивибраторы, выполненные, например, на микросхемах 1533АГ3, 7, 8 - первый и второй элементы И, 9 - инвертор, 10 - третий элемент ИЛИ, 11, 12, 13, 14 - пятый, шестой, третий и четвертый элементы И, 15, 16 - первый и второй элементы ИЛИ, 17, 18, 19, 20 - первый, второй, третий и четвертый усилители мощности, 21, 22, 23, 24 - первая, вторая, третья и четвертая обмотки управления рулевого привода.
На фиг.2 приведены диаграммы работы системы.
Работает система наведения следующим образом.
Производится выстрел и снаряд летит по баллистической траектории. В расчетной точке траектории разарретируется и раскручивается ротор гироскопа инерциального 2, выходят на режим батареи питания бортовой аппаратуры и ГСН 1, отделяется блок носовой, открывается входной зрачок ГСН.
При подлете снаряда к цели и при приеме отраженных от цели импульсов лазерного излучения ГСН формирует сигнал "Захват" (фиг.2а), который, поступая на первый вход первого элемента И 7, разрешает прохождение сигналов с первого и второго выходов гироскопа инерциального 2 на вход "Компенсация " ГСН 1 и в рулевой привод 3.
При вращении снаряда на первом и втором выходах ГИ 2 вырабатываются импульсы, суммарная длительность которых приблизительно равна половине периода вращения снаряда.
Под действием этого сигнала ось ГСН 1 будет стремиться разворачиваться в вертикальной плоскости вниз, а в ГСН при этом будет вырабатываться сигнал, компенсирующий влияние прецессии, обусловленной сигналом с инерциального гироскопа 2, при этом сигнал на выходе ГСН в процессе ее слежения за целью будет иметь следующий вид:
где f - функция, определяемая пеленгационной характеристикой ГСН;  угловая скорость линии "снаряд-цель";
угловая скорость линии "снаряд-цель";  угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
угловая скорость прецессии головки под действием сигнала "Компенсация" с гироскопа инерциального.
Указанный сигнал является исходным для формирования импульсов управления рулевым приводом автопилота (сигналов, вырабатываемых ГСН по выходам "+Y"; "-Y", "+Z", "-Z") (фиг.2г).
При этом в начальный момент наведения, когда начальный промах максимален, по выходам "+Y", "-Y", "+Z", "-Z" ГСН вырабатываются максимальные по величине команды, середина которых жестко привязана к импульсам подсветки цели, т.е. к сигналу Uc.вх., вырабатываемому релейными или линейными площадками ФПУ и поступающими с выхода элемента ИЛИ 29 ГСН (фиг.2б).
В зависимости от положения переключателя режимов система наведения работает в двух режимах.
Если переключатель замкнут - режим дальняя зона.
При работе в этом режиме на второй вход третьего элемента ИЛИ 10 через переключатель режимов поступает напряжение источника питания бортовой аппаратуры и на выходе третьего элемента ИЛИ 10 будет присутствовать сигнал логическая единица (фиг. 2в), который поступает на вторые входы третьего 13, четвертого 14, пятого 11 и шестого 12 элементов И и разрешает проход через них сигналов с выходов ГСН "+Y","-Y", "+Z", "-Z" без каких-либо изменений (фиг.2д).
Команды управления "+Y", "-Y" поступают на первые входы первой 15 и второй 16 схем ИЛИ, где они суммируются с сигналами компенсации веса, поступающими на их вторые и третьи входы с гироскопа инерциального 2. С выходов первой 15 и второй 16 схем ИЛИ сигналы управления поступают через первый 17 и второй 18 усилители мощности на первую 21 и вторую 22 обмотки управления рулевым приводом 3.
Команды управления "+Z", "-Z", пройдя через третий 19 и четвертый 20 усилители мощности, поступают соответственно на третью 23 и четвертую 24 обмотки управления рулевым приводом 3.
Под действием этих сигналов происходит отклонение рулей, вследствие чего происходит уменьшение рассогласования между осью снаряда и оптической осью ГСН. Таким образом происходит наведение снаряда на цель.
Если переключатель режимов работы разомкнут - режим ближняя зона.
При работе в этом режиме на втором входе третьего логического элемента ИЛИ 10 присутствует логический ноль, т.к. переключатель режимов разомкнут.
Сигнал Uс.вх. с выхода элемента ИЛИ 29 поступает на вход первого ждущего мультивибратора 5 и на его выходе вырабатывается импульс (фиг.2е), фронт которого совпадает с фронтом входного сигнала, а длительность определяется исходя из выражения:
τ =(Т-Кмах)/2,
где Т - период следования импульсов подсветки, Кмах - необходимая максимальная команда управления, поступающая на рулевой привод.
При этом сигналы с выходов ГСН "+Y", "-Y", "+Z", "-Z" (фиг.2г), поступающие на первые входы третьего 13, четвертого 14, пятого 11 и шестого 12 элементов И не проходят на их выходы, т.к. на вторых входах этих элементов И присутствует сигнал логического нуля с выхода третьего элемента ИЛИ 10 (фиг. 2з).
По заднему фронту сигнала с выхода первого ждущего мультивибратора 5 запускается второй мультивибратор 6 и на его выходе формируется импульс (фиг. 2ж), длительность которого равна Кмах, - необходимая максимальная команда управления, поступающая на рулевой привод.
При этом сигналы с выходов ГСН "+Y", "-Y", "+Z", "-Z", поступающие на первые входы третьего 13, четвертого 14, пятого 11 и шестого 12 элементов И пройдут на их выходы без изменения (фиг.2з), т.к. на вторых входах этих элементов И присутствует сигнал логической единицы с выхода третьего элемента ИЛИ 10, на первом входе которого присутствует сигнал с выхода второго ждущего мультивибратора 6 (фиг.2ж).
По завершению формирования импульса вторым ждущим мультивибратором 6 сигнал логического нуля с его выхода, поступая на первый вход третьего элемента ИЛИ 10 и далее на вторые входы элементов И 11-14, запрещает прохождение сигналов с выхода ГСН (фиг.2з).
Таким образом на выходах элементов И 11-14 формируются сигналы из сигналов, поступающих с выходов ГСН по длительности не более Кмах. Т.е. сигналы, длительность которых меньше Кмах, проходят без изменения, а сигналы, длительность которых больше Кмах., обрезаются до этой величины, причем середина входного сигнала и выходного сигнала остается жестко привязанной к сигналу Uс.вх.
Команды управления "+Y", "-Y" поступают на первые входы второй 16 и первой 15 схем ИЛИ, где они суммируются с сигналами компенсации веса, поступающими на ее второй и третий входы с гироскопа инерциального 2. С выходов первой 15 и второй 16 схем ИЛИ сигналы управления поступают через первый 17 и второй 18 усилители мощности на первую 21 и вторую 22 обмотки управления рулевым приводом 3.
Команды управления "+Z", "-Z", пройдя через третий 19 и четвертый 20 усилители мощности, поступают соответственно на третью 23 и четвертую 24 обмотки управления рулевым приводом 3.
Под действием этих сигналов происходит отклонение рулей, вследствие чего происходит уменьшение рассогласования между осью снаряда и оптической осью ГСН. Таким образом происходит наведение снаряда на цель.
Таким образом за счет ограничения величины максимальных команд управления и сохранения двух каналов управления при стрельбе на ближней зоне снарядами с большим диапазоном угловых скоростей вращения удалось повысить точность наведения системы.
Источник информации
1. "152-мм выстрел 3ВОФ64(3ВОФ93) с осколочно-фугасным управлением снарядом 3ОФ39 и зарядом 1 (уменьшенным переменным зарядом). Техническое описание и инструкция по эксплуатации 3ВОФ 64.00.00.000ТО (3ВОФ93.00.00.000ТО)".- М.: Военное издательство, 1990, с. 59-64.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205358C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2205361C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2205359C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2187781C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ | 2000 |
|
RU2191344C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2184925C2 |
| СПОСОБ ВЗВЕДЕНИЯ БОРТОВЫХ СИСТЕМ УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2191984C2 |
Изобретение относится к области вооружения, в частности к артиллерийским управляемым снарядам с лазерной головкой самонаведения. Технический результат - повышение точности наведения. Согласно изобретению в систему наведения управляемого снаряда, содержащую рулевой привод, гироскоп инерциальный, переключатель режимов и головку самонаведения, включающую функциональные элементы, в том числе элемент ИЛИ, формирующий на своем выходе сигналы с фотоприемного устройства, выход "Захват" головки самонаведения соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом "Компенсация" головки самонаведения и с третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы "+Z" и "-Z" головки самонаведения соединены с первыми входами третьего и четвертого элементов И соответственно, выходы третьего и четвертого элементов И соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, а вторые входы обмоток управления, вход гироскопа инерциального и вход переключателя режимов соединены с источником питания бортовой аппаратуры, введены первый и второй ждущие мультивибраторы, пятый и шестой элементы И, третий элемент ИЛИ. Причем выход элемента ИЛИ головки самонаведения соединен со входом первого ждущего мультивибратора, выход которого соединен со входом второго ждущего мультивибратора, выход которого соединен с первым входом третьего элемента ИЛИ, второй вход которого соединен с выходом переключателя режимов. Выход третьего элемента ИЛИ соединен со вторыми входами третьего, четвертого, пятого и шестого элементов И, первые входы пятого и шестого элементов И соединены с выходами "-Y", "+Y" головки самонаведения соответственно. Выходы пятого и шестого элементов И соединены с первыми входами первого и второго элементов ИЛИ соответственно. 2 ил.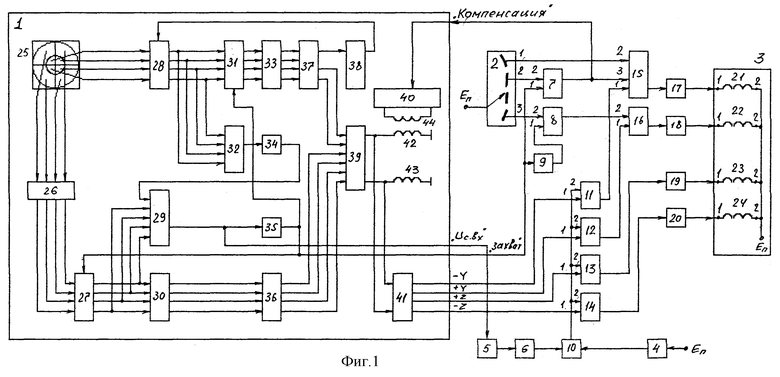
Система наведения управляемого снаряда, содержащая рулевой привод, гироскоп инерциальный, переключатель режимов и головку самонаведения, включающую функциональные элементы, в том числе элемент ИЛИ, формирующий на своем выходе сигналы с фотоприемного устройства, выход “Захват” головки самонаведения соединен с первым входом первого элемента И и через инвертор с первым входом второго элемента И, вторые входы которых соединены соответственно со вторым и третьим выходами гироскопа инерциального, выход первого элемента И соединен со входом “Компенсация” головки самонаведения и третьим входом первого элемента ИЛИ, второй вход которого соединен с первым выходом гироскопа инерциального, а его выход - со входом первого усилителя мощности, выход второго элемента И соединен со вторым входом второго элемента ИЛИ, выход которого соединен со входом второго усилителя мощности, выходы “+Z”, “-Z” головки самонаведения соединены с первыми входами третьего и четвертого элементов И соответственно, выходы третьего и четвертого элементов И соединены со входами третьего и четвертого усилителей мощности соответственно, выходы первого, второго, третьего и четвертого усилителей мощности соединены с первыми входами первой, второй, третьей и четвертой обмоток управления рулевого привода, а вторые входы обмоток управления, вход гироскопа инерциального и вход переключателя режимов соединены с источником питания бортовой аппаратуры, отличающаяся тем, что в нее введены первый и второй ждущие мультивибраторы, пятый и шестой элементы И и третий элемент ИЛИ, причем выход элемента ИЛИ головки самонаведения соединен со входом первого ждущего мультивибратора, выход которого соединен со входом второго ждущего мультивибратора, выход которого соединен с первым входом третьего элемента ИЛИ, второй вход которого соединен с выходом переключателя режимов, а выход третьего элемента ИЛИ соединен со вторыми входами третьего, четвертого, пятого и шестого элементов И, первые входы пятого и шестого элементов И соединены с выходами “-Y”, “+Y” головки самонаведения соответственно, а выходы пятого и шестого элементов И соединены с первыми входами первого и второго элементов ИЛИ соответственно.
| Способ образования азокрасителей на волокнах | 1918 |
|
SU152A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Военное издательство, 1990, с | |||
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 1998 |
|
RU2138768C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ САМОНАВОДЯЩЕЙСЯ РАКЕТЫ КЛАССА ВОЗДУХ - ПОВЕРХНОСТЬ | 1997 |
|
RU2111439C1 |
| US 5042742, 27.08.1991 | |||
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
