Изобретение относится к балансировке полусферических резонаторов и может быть использовано в технологии приборостроения при производстве навигационных систем самолетов, кораблей, космических аппаратов, управляемых бурильных головок.
Известно, что проводят балансировку полусферических резонаторов волновых твердотельных гироскопов, что вызвано отклонением геометрии реальных полусферических резонаторов от идеальной осесимметричной формы [1].
Известно, что балансировку полусферических резонаторов с добротностью 105, выполненных из алюминиевого сплава, проводят удалением неуравновешенной массы из 4-х участков полусферической оболочки [2].
Для гироскопа авиационной точности полусферический резонатор должен иметь высокую добротность (порядка 107), поэтому в качестве материала для таких резонаторов используют кварцевое стекло, обладающее малым внутренним трением. Удаление неуравновешенной массы с поверхности кварцевого стекла механическим путем приводит в падению акустической добротности полусферического резонатора и к ухудшению характеристик волнового твердотельного гироскопа, поэтому на кромке оболочки резонатора нарезаются специальные балансировочные зубцы [3].
Наиболее близким к предложенному способу является способ балансировки полусферического резонатора волнового твердотельного гироскопа [4]. Способ включает закрепление резонатора за ножку, установление датчиков возбуждения и измерения вблизи кромки резонатора, возбуждение резонатора, определение 4-х динамически неуравновешенных масс по 2-м взаимно перпендикулярным осям, определение статически неуравновешенной массы оптическим методом, распределение статически неуравновешенной массы по 4-м точкам динамически неуравновешенной массы и удаление несбалансированной массы лазерным лучом из 4-х точек резонатора по 2-м взаимно перпендикулярным осям.
Известный способ позволяет определить лишь поперечные колебания резонаторной ножки, продольные перемещения и соответствующая им неуравновешенная масса при этом не определяются. Таким образом, известный способ балансировки не позволяет точно определить неуравновешенную массу, то есть точность балансировки недостаточна.
Решаемой задачей предлагаемого изобретения является повышение точности балансировки.
Предлагаемый способ балансировки заключается в том, что резонатор закрепляют за ножку, устанавливают пьезоэлектрический датчик на свободном конце ножки, возбуждают колебания, измеряют напряжение датчика для различных ориентаций стоячей волны в резонаторе, рассчитывают неуравновешенную массу математической обработкой полученных экспериментальных данных и удаляют неуравновешенную массу ионным лучом с протяженной поверхности резонатора.
Полусферический резонатор (см. чертеж) закрепляют за ножку 1 и устанавливают емкостные датчики 2, которые служат для возбуждения колебаний в резонаторе, и на свободный конец резонаторной ножки устанавливают пьезоэлектрический датчик 3, который измеряет движение свободного конца резонаторной ножки, после чего с помощью датчиков 2 возбуждают стоячую волну в резонаторе.
Движение свободного конца резонаторной ножки зависит от величины несбалансированной массы резонатора. Пусть ρ(ϕ) - функция распределения массы резонатора в зависимости от азимутального угла ϕ. Любой дефект реального резонатора может быть описан разложением функции ρ(ϕ) в ряд Фурье:
где ρ1...ρi - амплитуды гармоник массового дефекта;
ϕ1...ϕl - ориентация гармоник массового дефекта относительно полусферической оболочки резонатора.
Первая и третья гармоники ряда (1) приводят к поперечным движениям резонаторной ножки, а вторая гармоника - к ее продольным движениям при 2-ой форме колебаний оболочки резонатора. Именно эти 3 гармоники массового дефекта должны быть определены и устранены при балансировке. Измеряя напряжение датчика 3 при различных ориентациях стоячей волны получаем массив точек Ui(ϕi), который может быть математически аппроксимирован функцией вида
Коэффициенты U1-U3 прямо пропорциональны амплитудам гармоник массового дефекта ρ1-ρ3, а углы ϕ1-ϕ3 указывают их ориентацию относительно оболочки резонатора. Эти коэффициенты и углы рассчитывают математической обработкой полученных экспериментальных данных, для чего аппроксимируют массив точек Ui(ϕi) функцией (2). В результате расчета получают амплитуды гармоник массового дефекта ρ1-ρ3 и соответствующие углы ϕ1-ϕ3.
Рассчитанную неуравновешенную массу удаляют ионным лучом с протяженной поверхности резонатора в соответствии с найденным законом распределения этой массы.
Ионное травление не нарушает структуру кварцевого стекла и не снижает добротность резонатора. Поэтому удаление материала проводят непосредственно с поверхности полусферической оболочки, наличие специальных балансировочных зубцов не требуется.
Предложенный способ иллюстрируется следующим примером.
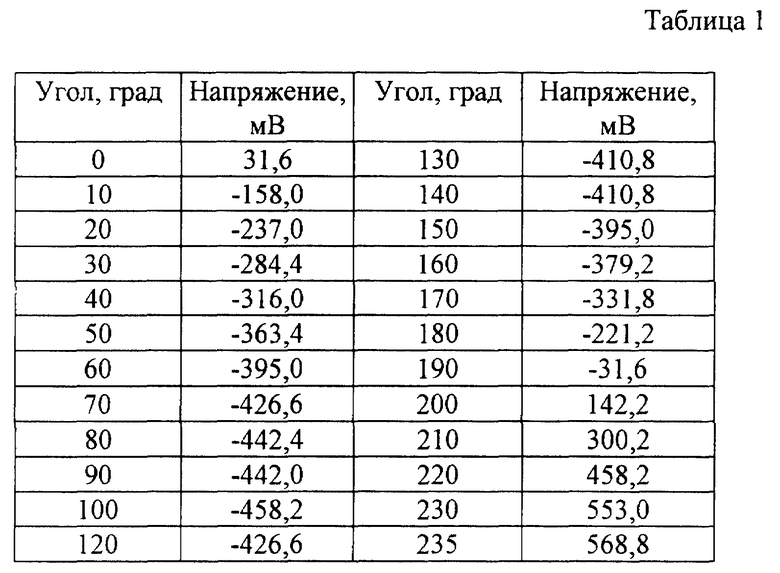
Проводят балансировку беззубцового полусферического резонатора диаметром 30 мм, изготовленного из кварцевого стекла, с рабочей частотой около 8 кГц. Для этого в вакуумной камере резонатор закрепляют за ножку со стороны внутренней полусферы, а на свободном конце ножке со стороны внешней полусферы устанавливают пьезоэлектрический датчик с чувствительностью 50 мВ/см•сек. Вблизи кромки резонатора устанавливают 16 емкостных датчиков, используемых для возбуждения и измерения параметров стоячей волны, зазор между поверхностью емкостного датчика и поверхностью резонатора составляет 100 мкм. После вакуумирования камеры до уровня 10-7 мм рт.ст. возбуждают колебания на рабочей частоте (амплитуда колебаний кромки полусферической оболочки составляет 1 мкм) и измеряют напряжение пьезоэлектрического датчика. После этого ориентацию стоячей волны изменяют с шагом 10 градусов и для каждого положения стоячей волны фазочувствительным вольтметром измеряют напряжение пьезоэлектрического датчика. Полученные экспериментальные данные приведены в таблице.
Отрицательные напряжения датчика означают, что измеряемое напряжение было в противофазе с напряжением датчиков 2.
Математическая обработка экспериментальных данных состояла в аппроксимации этих экспериментальных точек функцией (2). Расчет дает следующие значения неизвестных величин:
U1 = 532 мВ; U2 = 45 мВ; U3 = 107 мВ
ϕ1 = -276,69o; ϕ2 = -256,08o; ϕ3 = -98,86o.
Напряжение Ui и амплитуда соответствующей гармоники неуравновешенной массы Mi связаны соотношением
M=K•U,
где K - постоянный, экспериментально определенный коэффициент, который для данного оборудования составляет 1,36 мкг/мВ. Таким образом, амплитуды гармоник неуравновешенной массы составляют:
M1 = 723,5 мкг; M2 = 61,2 мкг; M3 = 145,5 мкг.
Для удаления неуравновешенной массы используют ионный источник, формирующий поток ионов аргона с энергией ионов 1,5 кэВ, угол падения потока ионов на поверхность резонатора составляет 85o. При удалении неуравновешенной массы мощность ионного потока постоянна, а резонатор вращают с переменной скоростью, чтобы обеспечить удаление каждой гармоники неуравновешенной массы.
После ионного травления было вновь проведено измерение величины неуравновешенной массы по вышеизложенной методике. Были получены следующие значения 1-3 гармоник неуравновешенной массы:
M1 = 23,1 мкг; M2 = 8,2 мкг; M3 = 4,1 мкг.
Общая величина остаточной неуравновешенной массы составила около 30 мкг. Значение систематической составляющей дрейфа гироскопа с таким резонатором равно около 1,3o/час, что позволяет использовать такой гироскоп в навигационных системах авиационной точности.
Таким образом, предложенный способ балансировки полусферических резонаторов позволяет довести точность балансировки до 30 микрограмм при сохранении высокой акустической добротности резонатора (107 и выше) и позволяет балансировать резонаторы, не имеющие балансировочных зубцов.
Источники информации
1. D. D. Lynch "Projected system performance based on recent HRG test results", Procceding of the IEEE/AIAA 5th Digital Avionics Systems Conference, Seattle, WA, October 31 - November 3, 1983, p. 18.1.1-18.1.6.
2. Патент США N 3656354, НКИ 73/505, МКИ G 01 C 19/56, 1969.
3. European patent N 0141621, МКИ G 01 C 19/56, 1983.
4. Авторское свидетельство СССР N 1582799, МКИ G 01 C 19/56, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа | 2017 |
|
RU2688834C2 |
| СПОСОБ БАЛАНСИРОВКИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО БАЛОЧНОГО БИМОРФНОГО ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ВИБРАЦИОННОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2417351C2 |
| СПОСОБ БАЛАНСИРОВКИ КВАРЦЕВОГО ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2580175C1 |
| СПОСОБ БАЛАНСИРОВКИ МЕТАЛЛИЧЕСКОГО ЗУБЧАТОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2013 |
|
RU2526217C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2001 |
|
RU2218554C2 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ОХЛАЖДАЕМАЯ МЕТАЛЛОКЕРАМИЧЕСКАЯ РАБОЧАЯ ЛОПАТКА ГАЗОВОЙ ТУРБИНЫ | 1995 |
|
RU2095579C1 |
| СПОСОБ БАЛАНСИРОВКИ МЕТАЛЛИЧЕСКОГО БЕЗЗУБЦОВОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2560755C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1994 |
|
RU2046310C1 |
Способ может быть использован в технологии приборостроения при производстве навигационных систем самолетов, кораблей, космических аппаратов, управляемых бурильных головок. Способ балансировки заключается в том, что резонатор закрепляют за ножку, устанавливают пьезоэлектрический датчик на свободном конце ножки, возбуждают колебания, измеряют напряжение датчика для различных ориентаций стоячей волны в резонаторе, рассчитывают неуравновешенную массу математической обработкой полученных экспериментальных данных и удаляют неуравновешенную массу ионным лучом с поверхности полусферической оболочки резонатора. Способ позволяет довести точность балансировки до 30 мкг при сохранении высокой акустической добротности резонатора (107 и выше) и позволяет балансировать резонаторы, не имеющие балансировочных зубцов. 1 табл., 1 ил.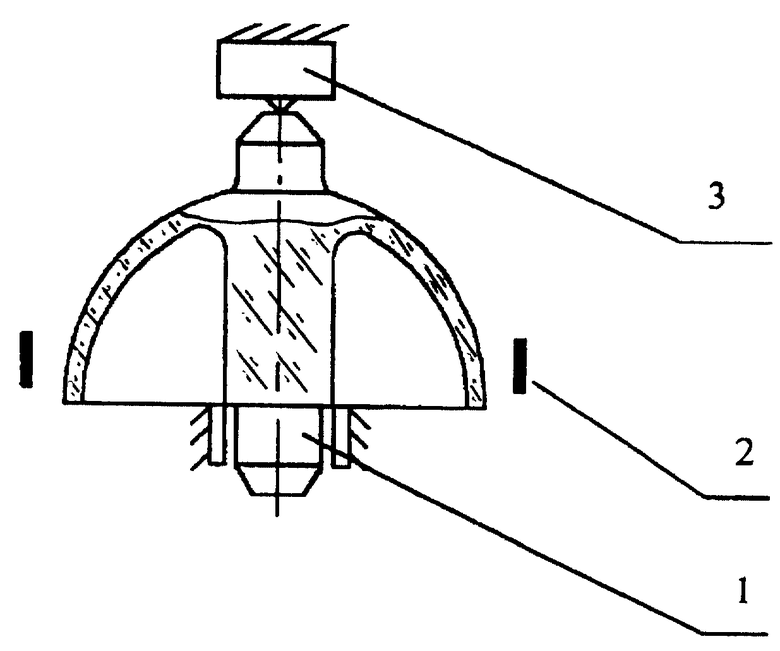
Способ балансировки полусферического резонатора волнового твердотельного гироскопа, включающий закрепление резонатора за ножку, установку датчиков возбуждения и измерения и удаление неуравновешенной массы, отличающийся тем, что пьезоэлектрический датчик устанавливают на свободном конце ножки резонатора для измерения его перемещения, возбуждают колебания резонатора, измеряют напряжение пьезоэлектрического датчика для различных ориентаций стоячей волны в резонаторе, рассчитывают неуравновешенную массу путем математической обработки полученных экспериментальных данных и удаляют неуравновешенную массу ионным лучом с поверхности полусферической оболочки резонатора.
| СПОСОБ ДИНАМИЧЕСКОЙ И СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ВИБРАЦИОННОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1988 |
|
SU1582799A1 |
| RU 2056038 C1, 10.03.96 | |||
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| US 5760304 A, 02.06.98 | |||
