Изобретение относится к технологии приборостроения и может быть использовано для балансировки резонаторов вибрационного твердотельного гироскопа.
Целью изобретения является повышение точности и производительности балансировки.
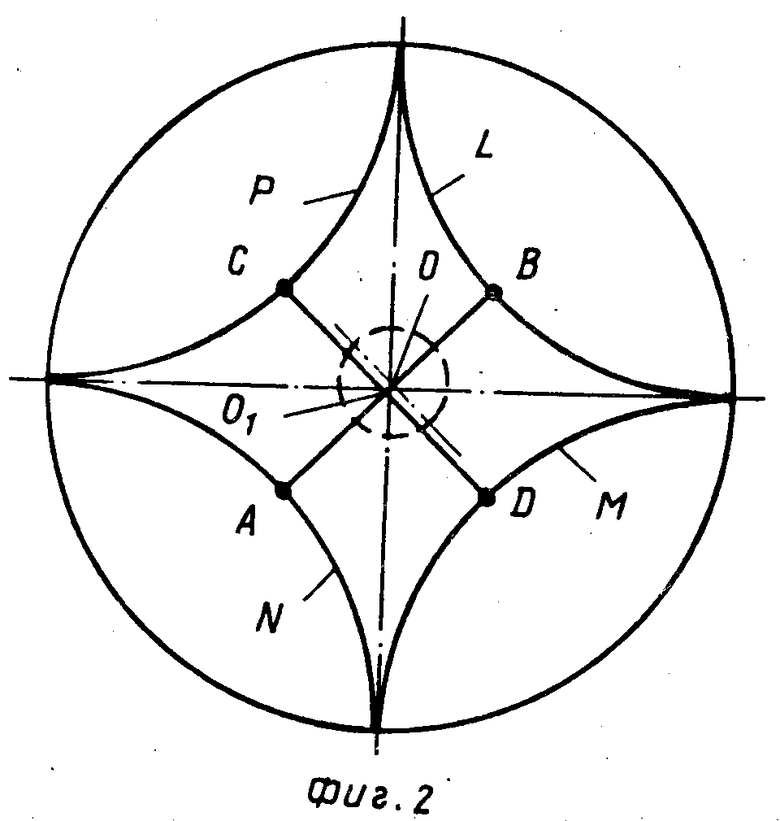
На фиг.1 представлена блок-схема иллюстрирующая предлагаемый способ балансировки резонатора; на фиг.2 представлена интерференционная картина колебаний резонатора гироскопа с соответствующими построениями, позволяющими определить величину неуравновешенной массы, вызвавшей смещение центра масс резонатора относительно оси симметрии.
Способ реализуется следующим образом.
Резонатор устанавливается в герметичном технологическом корпусе 1 в поворотное приспособление 2 и закрепляют на ножке. В корпусе закреплены датчики возбуждения 3 и измерения 4 и 5. Датчики 4 и 5 измерения расположены друг относительно друга под углом
ϕ1=(4n+2)π/8(1)
и под углом
ϕo= ± (2n+1)π/8, (2) где n=0, 1, 2, относительно датчика 3 возбуждения. Совмещают отметку 6 на резонаторе с датчиком 3 возбуждения. Создают необходимую среду внутри корпуса 1, возбуждают резонатор ТВГ на частоте fo вынужденных колебаний, близкой к собственным частотам f1 и f2, по осям измеряют с помощью датчиков 4 и 5 и блока 7 измерения разности фаз ΔΨсигналов с датчиков 4 и 5, установленных около кромки резонатора ТВГ.
Поворачивают с помощью приспособления 2 резонатор, постоянно измеряя разность ΔΨ фаз добиваются максимального фазового сдвига ΔΨмакс
В этом случае величина частотой расстройки резонатора твердотельного волнового гироскопа может быть определена по формуле
Δf  tgΔΨмакс (3) где Q добротность резонатора.
tgΔΨмакс (3) где Q добротность резонатора.
Для того, чтобы осуществить частотную настройку резонатора, необходимо с его поверхности удалить неуравновешенную массу m, величина которой будет определятьcя значением частотной расстройки Δf, приведенным в формуле (3). Симметрия резонатора нарушена не будет, если неуравновешенную массу с поверхности резонатора устранять из четырех точек, расположенных симметрично относительно геометрического центра резонатора. Для этих случаев значения неуравновешенных масс могут быть определены выражениями
Δm1(2,3,4)= K (4) где К коэффициент влияния;
(4) где К коэффициент влияния;
Δm1(2,3,4)- номер неуравновешенной массы.
Значение коэффициента К
К=1,7πρh˙R2,(5) где ρ- плотность материала;
h толщина материала;
R радиус резонатора.
Тогда совмесно решая систему уравнений, получим значение суммарной неуравновешенной массы m, которую необходимо удалить с поверхности резонатора для достижения частотной настройки путем коррекции из четырех точек
m 4m1(2,3,4)= 4 1,7πρhR
1,7πρhR · tg(Ψмакс)f
· tg(Ψмакс)f K
K (6)
(6)
где Кl=3,4πρhR2,
Для конкретного резонатора, изготовленного из кварца марки КВ-1 c параметрами h=10-3 м; R=3,5˙10-2 м; ρ=2,21˙103 кг/м3, значение коэффициентов К и Кl определены и составляют
К=21,7 Г,
Кl=15 мГ/Гц.
Расположение неуравновешенных масс m 1(2,3,4)однозначно связано с положением осей инерции резонатора. Данный метод позволяет однозначно определить положение осей инерции резонатора, так как в момент, когда разность фаз максимальна, то есть ΔΨ=ΔΨмакс, одна из осей инерции (ось y) расположена напротив датчика 5 измерения.
Для получения визуализированной картины колебаний резонатора используют метод двойной экспозиции, используемый в области оптической голографии. С этой целью поверхность резонатора через прозрачное герметичное окно 8 освещает лазерным излучением, создаваемым лазером 9 и подаваемым через диафрагму 10, отражающие и разделительное зеркала 11, 12 и 13 и создающим рассеянный предметный световой поток коллиматором 14. Отраженный от резонатора предметный световой пучок поступает на фотопластинку 15, куда поступает также опорный световой пучок, являющийся частью светового потока лазера 9, отраженного разделительным зеркалом 12, зеркалом 16, расфокусированного коллиматором 17. Экспонирование осуществляется в течение 50 с, чтобы обеспечить длительную экспозицию голографирования.
После экспонирования прекращают возбуждение и освещение резонатора и осуществляют проявление и фиксирование фотопластинки 15, промывку, закрепление фиксажем, промывку и сушку. Получают голографическую запись виброкартин. После этого осуществляют восстановление полученной голограммы. С этой целью фотопластинку 15 устанавливают на пути светового потока лазера 9 после коллиматора 18. Полученные изображения регистрируют фотопластинкой 19 в масштабе, необходимом для дальнейших преобразований.
Изображение представляет визуализированную проекцию пространственной интеpференционной картины деформаций резонатора на плоскость, перпендикулярную оси вращения резонатора ТВГ, с четким изображением картины распределений вибросмещения резонатора.
С помощью полученной фотопластинки или фотографии находят на поверхности полусферического резонатора точку О (фиг.2) с нулевой амплитудой колебаний, как геометрический центр пересечения двух прямых на фотопластинке (фотографии), соединяющих вершины ближайших к центру резонатора полос интерференционной картины, которые являются проекциями объемной картины колебаний на поверхности резонатора.
Если полусферический резонатор симметричен и с достаточной степенью сбалансирован, то интерференционные полосы МLNP, характеризующие колебания резонатора, полученные на фотопластинке, располагаются симметрично относительно оси ножки О, и точка О1 с нулевой амплитудой колебаний резонатора совпадает с точкой О осью ножки. Положение оси ножки О определяют, например, с помощью прозрачной маски, наносимой на поверхность фотопластинки и базируемой по внешней поверхности изображения резонатора, а может быть выделено как светоконтрастное изображение на фотопластинке (фотографии).
В случае несовпадения геометрического центра резонатора с точкой нулевых колебаний О1 расстояние между точками О и О1 характеризует величину асимметрии колебаний резонатора, а следовательно, величину дисбаланса.
Для коррекции данного дисбаланса необходимо определить величину неуравновешенных масс, приводящих к его появлению, и определить величину и расположение результирующих масс, устранение которых позволит осуществить частотную настройку резонатора и его балансировку.
Для решения поставленной задачи необходимо определить проекции Δ<N>хиΔy вектора ОО1 на оси инерции х и y, которые будут характеризовать величину неуравновешенной массы, приводящей к появлению асимметрии картины колебаний резонатора. Так как в начальный момент отметка 6 совпадала с положением датчика 3 возбуждения, то угол ϕΣ наклона осей инерции, например относительно отметки 6 в момент ΔΨ=ΔΨмакс, может быть определен как
ϕΣ ϕ ± ϕo (7)
Так как отсчет угла производится от датчика 3 возбуждения, максимальный фазовый сдвиг ΔΨмакс воспринимается одним из датчиков 4,5 измерения, причем знак определяется знаком ΔΨмакс.
В общем случае задача одновременной частотной настройки резонатора и его балансировки может быть решена путем удаления четырех масс с поверхности резонатора, причем сдвиг ОО1 картины колебаний вызовет пропорциональное изменение удаляемых масс m1-m4.
Для определения соотношения неуравновешенных масс m1, m2, m3, m4, коррекция которых позволит одновременно осуществить частотную настройку и балансировку, используем соотношения:
 m
m = m (8)
= m (8)
Тогда отклонение неуравновешенных масс, расположенных на осях инерции резонатора в точках А, В, С, D, можно определить из уравнений:
Δmx1(3)=± KΔx;
Δmy2(4)= ± KΔy;(9) при этом учитывается, что большая масса удаляется со стороны большей жесткости резонатора относительно точки О. Из выражений (8) и (9) можно определить соотношения для неуравновешенных масс m1-m4
m1= 
m2= 
m3= 
m4=  (10) где m1-m4 составляющие неуравновешенной массы;
(10) где m1-m4 составляющие неуравновешенной массы;
К1 коэффициент пропорциональности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа | 2017 |
|
RU2688834C2 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| СПОСОБ БАЛАНСИРОВКИ МЕТАЛЛИЧЕСКОГО БЕЗЗУБЦОВОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2560755C1 |
| СПОСОБ БАЛАНСИРОВКИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1998 |
|
RU2147117C1 |
| СПОСОБ БАЛАНСИРОВКИ КВАРЦЕВОГО ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2580175C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| ИНЕРЦИАЛЬНЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ ТИПА БАЛАНСНОЙ МЭМС И СПОСОБ БАЛАНСИРОВКИ ТАКОГО ДАТЧИКА | 2012 |
|
RU2566534C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ГОДНОСТИ ЦИЛИНДРИЧЕСКИХ РЕЗОНАТОРОВ ЧАСТОТНЫХ ДАТЧИКОВ ДАВЛЕНИЯ | 2003 |
|
RU2245527C2 |

Изобретение относится к технологии приборостроения и может быть использовано для балансировки полусферических резонаторов твердотельных волновых гироскопов (ТВР). Целью изобретения является повышение точности и производительности балансировки. Определяют четыре динамически неуравновешенные массы m/4, после чего получают визуализированную проекцию пространственной интерференционной картины колебаний резонатора на плоскость, перпендикулярную его оси симметрии, определяют по ней точку с нулевой амплитудой колебаний как геометрический центр пересечения двух прямых на поверхности картины колебаний резонатора, попарно соединяющих вершины ближайших к центру полос интерференционной картины, определяют дисбаланс как величину, пропорциональную расстоянию между точкой с нулевой амплитудой колебаний и геометрическим центром резонатора, находят его проекции Δx и Δy на систему координат, центр которой связан с геометрическим центром резонатора, а величину составляющих результирующей неуравновешенной массы m1(2,3,4) в каждой из полученных четырех точек определяют по формулам m1=m+4ΔxK1/4; m2=m+4ΔyK1/4; m3=m-4ΔxK1/4; m4=m-4ΔyK1/4, где m1-m4 составляющие неуравновешенной массы; K1 коэффициент пропорциональности, после чего полученные составляющие неуравновешенной массы удаляют из четырех точек кромки полусферического резонатора ТВГ. 1 з.п. ф-лы, 2 ил.
| Кисиленко С.П | |||
| и Сарапулов С.А | |||
| Методика расчета допусков на точность изготовления полусферического резонатора ТВГ | |||
| Киев: КПИ, Труды кафедры "Теоретическая механика", 1987, с.2 - 11. |
