Изобретение относится к производству твердотельных волновых гироскопов. При производстве резонатора твердотельного волнового гироскопа (ТВГ) из-за технологических дефектов появляются погрешности, которые приводят к расщеплению собственных частот резонатора, снижению добротности вследствие конструктивного демпфирования. Все эти дефекты отрицательно сказываются на точностных характеристиках прибора. Ряд дефектов устраняется балансировкой. В ходе балансировки влияние дефектов компенсируется путем удаления небольшого количества вещества из определенных мест полусферического резонатора.
Известен способ балансировки полусферического резонатора волнового твердотельного гироскопа и устройство для его осуществления (RU 2147117, публ. 27.03.2000 г.), включающий закрепление резонатора за ножку, установку датчиков возбуждения и измерения и удаление неуравновешенной массы. Пьезоэлектрический датчик устанавливают на свободном конце ножки резонатора для измерения его перемещения, возбуждают колебания резонатора, измеряют напряжение пьезоэлектрического датчика для различных ориентаций стоячей волны в резонаторе, рассчитывают неуравновешенную массу путем математической обработки полученных экспериментальных данных и удаляют неуравновешенную массу с поверхности полусферической оболочки резонатора.
Недостатком известного способа является отсутствие возможности регистрировать реакцию в опоре крепления и определять момент сил, позволяющий проводить балансировку по всей поверхности полусферы. Так же из-за ограниченного количества измерительных датчиков ограничивается точность измерений.
Задачей заявляемого способа является повышение точности определения дефектов резонатора.
Указанный технический результат достигается тем, что способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа включает закрепление резонатора за ножку, установку датчиков возбуждения и измерения, возбуждение колебаний резонатора, регистрацию сигналов с датчиков для различных ориентации стоячей волны в резонаторе, расчет неуравновешенной массы путем математической обработки полученных экспериментальных данных для дальнейшей балансировки резонатора, при этом дополнительно измеряют реакцию в опоре в месте крепления резонатора.
В месте крепления резонатора устанавливают, по крайней мере, один дискретный измерительный датчик, а также измерительные датчики устанавливают на свободном конце ножки со стороны внешней полусферы.
Дискретный контакт в месте крепления ножки резонатора позволяет ввести в зону сопряжения датчики, число которых три или более, и провести более точные измерения перемещений во время возбуждения резонатора для различных ориентаций стоячей волны. Большее число датчиков позволяет провести более точную обработку полученных сигналов и повысить точность балансировки путем удаления неуравновешенной массы с поверхности полусферической оболочки резонатора.
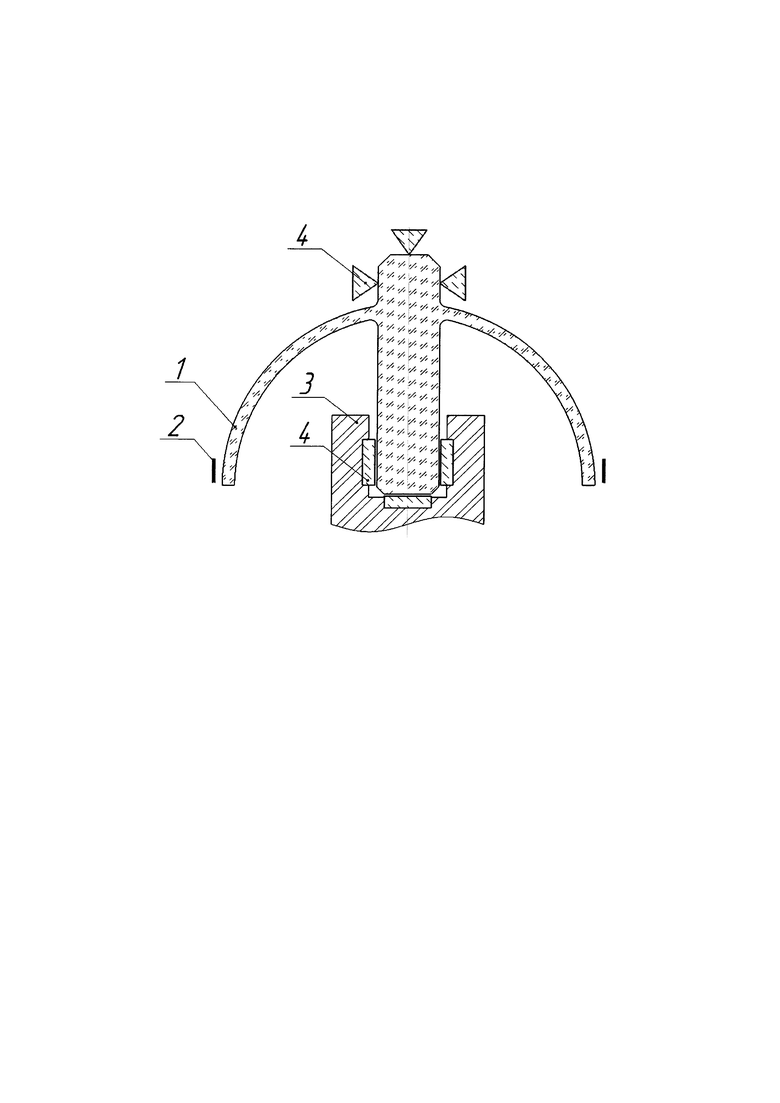
Устройство для определения дисбаланса масс полусферического резонатора ТВГ поясняется рисунком и содержит резонатор 1, датчики возбуждения 2, опору для установки ножки резонатора (цанговый зажим) 3, датчики измерения 4. Датчики 4 установлены как в месте крепления резонатора, так и на свободном конце ножки резонатора.
Дополнительные датчики позволяют измерять реакцию в опоре крепления резонатора для определения потери энергии колебаний резонатора в месте крепления. Число дискретных датчиков превышает число возможных уравнений равновесия, больше трех, что путем пересчета позволяет получить более точный результат о дисбалансе.
Как частный случай можно выбрать три пьезоэлектрических датчика, расположенных в месте зажима резонатора. Датчики должны располагаться на равном удалении и под равным углом друг относительно друга.
Способ для определения дисбаланса масс полусферического резонатора ТВГ реализуют следующим образом.
Закрепляют резонатор 1 за ножку в месте зажима 3 с датчиками измерения 4, устанавливают датчики возбуждения 2. Датчики измерения 4 устанавливают в месте зажима для измерения реакций в опоре и на свободном конце ножки резонатора 1. Возбуждают колебания резонатора 1, регистрируют сигналы с датчиков 4 для различных ориентаций стоячей волны в резонаторе. Рассчитывают неуравновешенные массы путем математической обработки полученных экспериментальных данных для дальнейшей балансировки резонатора.
Математическая обработка сигнала заключается в определении величины амплитуды и углового положения колебаний относительно датчиков возбуждения
 , где
, где
a1 - амплитуда сигнала с первого пьезоэлектрического датчика;
а2 - амплитуда сигнала со второго пьезоэлектрического датчика;
а3 - амплитуда сигнала с третьего пьезоэлектрического датчика;
А - амплитуда колебаний.
 , где
, где
ϕ - угловое положение колебаний ножки относительно датчиков возбуждения.
Способ позволяет проводить измерение одновременно несколькими датчиками, определять колебания всей ножки, как в горизонтальном, так и в вертикальном направлении, рассчитывать момент колебаний ножки для определения расположения дефекта масс не только на кромке резонатора, но и на всей полусфере. Наличие нескольких измерительных датчиков позволяет получить более точную информацию о дисбалансе.
Способ позволяет определять момент действующих сил [1], что позволяет определить не только угловое положение дефекта на кромке резонатора, но и определять расположение дефекта по всей поверхности полусферы резонатора.
Данный способ позволяет проводить измерение реакций непосредственно в опоре закрепления. Использование датчиков на наружной ножке резонатора дополняет информацию о колебательной картине резонатора.
1. Жбанов Ю.К., Каленова Н.В. «Поверхностный дебаланс волнового твердотельного гироскопа» // Изв. РАН. МТТ. 2001. №3. С. 11-18.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БАЛАНСИРОВКИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1998 |
|
RU2147117C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ И СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ВИБРАЦИОННОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1988 |
|
SU1582799A1 |
| Способ контроля физических параметров резонатора твердотельного волнового гироскопа | 2021 |
|
RU2783189C1 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| СПОСОБ БАЛАНСИРОВКИ КВАРЦЕВОГО ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 2014 |
|
RU2580175C1 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП С МЕТАЛЛИЧЕСКИМ РЕЗОНАТОРОМ | 2021 |
|
RU2785956C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
Изобретение относится к производству твердотельных волновых гироскопов. Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа дополнительно содержит этапы, на которых измеряют реакцию в опоре в месте крепления резонатора, а математическая обработка сигнала заключается в определении величины амплитуды и углового положения колебаний относительно датчиков возбуждения, рассчитанных по формуле
где a1 - амплитуда сигнала с первого пьезоэлектрического датчика;
а2 - амплитуда сигнала со второго пьезоэлектрического датчика;
а3 - амплитуда сигнала с третьего пьезоэлектрического датчика;
А - амплитуда колебаний;
где ϕ - угловое положение колебаний ножки относительно датчиков возбуждения.
Технический результат – повышение точности определения дефектов резонатора. 2 з.п. ф-лы, 1 ил.
1. Способ определения дисбаланса масс полусферического резонатора твердотельного волнового гироскопа, включающий закрепление резонатора за ножку, установку датчиков возбуждения и измерения, возбуждение колебаний резонатора, регистрацию сигналов с датчиков для различных ориентаций стоячей волны в резонаторе, расчет неуравновешенной массы путем математической обработки полученных экспериментальных данных для дальнейшей балансировки резонатора, отличающийся тем, что дополнительно измеряют реакцию в опоре в месте крепления резонатора, а математическая обработка сигнала заключается в определении величины амплитуды и углового положения колебаний относительно датчиков возбуждения, рассчитанных по формуле
где a1 - амплитуда сигнала с первого пьезоэлектрического датчика;
а2 - амплитуда сигнала со второго пьезоэлектрического датчика;
а3 - амплитуда сигнала с третьего пьезоэлектрического датчика;
А - амплитуда колебаний;
где ϕ - угловое положение колебаний ножки относительно датчиков возбуждения.
2. Способ по п. 1, отличающийся тем, что измерительные датчики устанавливают на свободном конце ножки со стороны внешней полусферы.
3. Способ по п. 1, отличающийся тем, что определяют момент действующих сил, позволяющий определить не только угловое положение дефекта на кромке резонатора, но и определять расположение дефекта по всей поверхности полусферы резонатора.
| СПОСОБ БАЛАНСИРОВКИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1998 |
|
RU2147117C1 |
| Калёнова Н.В | |||
| Динамические эффекты неуравновешенности полусферического резонатора волнового твердотельного гироскопа и методы его балансировки | |||
| Автореферат на соискание ученой степени кандидата физико-математических наук | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 4277976 A1, 14.07.1981 | |||
| Устройство для балансировки динамически настраиваемых гироскопов | 1978 |
|
SU767594A1 |
| УСТРОЙСТВО ДЛЯ ТОЧНОЙ БАЛАНСИРОВКИ ПОПЛАВКОВЫХГИРОСКОПОВ | 0 |
|
SU271083A1 |

