Заявленное изобретение относится к робототехнике и касается исполнительного органа робота и манипулятора, который может использоваться как в машиностроении, так и медицине при конструировании электромеханических протезов, в частности протезов руки человека.
Известен схват манипулятора, содержащий сильфон, связанный с эластичным баллоном, стенка которого заполнена электрореологической суспензией, повышающей жесткость захвата при увеличении ее вязкости в поле электректных выступов дополнительной оболочки. Устройство также снабжено силовым цилиндром и электромагнитной системой управления (Авт.св. СССР N 1805032, кл. B 25 J 15/00, 30.03.93).
Недостатком известного устройства является его конструктивная сложность, обусловившая недостаточное быстродействие.
Наиболее близким аналогом заявленного изобретения является схват манипулятора, известный из авт.св. СССР N 988550, кл. B 25 J 15/00, 25.01.83.
Известное устройство содержит сильфон, полость которого связана с источником давления рабочего тела в виде сжатого воздуха или жидкости, и фиксирующую камеру из эластичного материала, заполненную электрореологической суспензией. Одна из стенок сильфона выполнена гладкой и является общей с фиксирующей камерой, что упрощает конструкцию.
Однако отсутствие в сильфоне прокачки рабочего тела, а также регулирование подачи рабочего тела посредством механического клапана снижает уровень управляемости и быстройдействие устройства.
Задачей изобретения является преодоление указанных недостатков, то есть обеспечение при простоте конструктивного выполнения, повышенной надежности работы, быстродействия и высокого уровня управляемости с помощью компьютерной техники.
Технический результат достигается за счет того, что в схвате манипулятора, содержащем размещенный на гибком основании сильфон, полость которого посредством трубопровода связана с источником давления, электроды, цепь питания которых соединена с источником тока, и электрореологическую жидкость для обеспечения жесткости схвата при ее загустении, согласно изобретению полость сильфона заполнена электрореологической жидкостью, являющейся рабочим телом сильфона, а трубопровод на отводящих участках снабжен связанным с электродами электрореологическими затворами и образует с полостью сильфона замкнутый контур для прокачки электрореологической жидкости через сильфон при включении насоса.
Величина напряженности электрического поля для создания необходимой степени загустения жидкости в затворах составляет 10 - 20 В/мм, при этом используют электрореологическую жидкость, время изменения вязкости которой при подаче напряжения составляет 10-2-10-4 с.
Из уровня техники не обнаружено решений, обладающих признаками, сходными с совокупностью признаков, характеризующих заявленное изобретение, вследствие чего создается вывод о его соответствии условию изобретательского уровня.
Изобретение поясняется чертежом.
Схват манипулятора состоит из сильфона 1, наложенного на гибкое пружинящее основание 2, на концах которого имеются зажимные губки 3 для захвата и удержания предмета 4.
Полость сильфона заполнена электрореологической жидкостью, являющейся рабочим телом сильфона, и посредством трубопровода связана с источником давления в виде гидравлического насоса 5.
Трубопровод на отводящих участках выполнен в виде гибких трубок 6, 7 и снабжен электрореологическими затворами 8, 9 и коллектором 10. Электрореологические затворы 8, 9 имеют в своем составе электроды 11, 12, цепь питания которых соединена с источником тока. Электроды 11, 12 помещены в электрореологическую жидкость так, что при подаче напряжения вязкость электрореологической жидкости увеличивается на участках затворов.
Трубопровод образует с полостью 13 сильфона замкнутый контур, за счет чего при работе гидравлического насоса и создании в системе давления жидкость прокачивается по замкнутому контуру: насос 5, сильфон 1, гибкие трубки 6, 7, электрореологические затворы 8, 9, коллектор 10.
При подаче управляющего напряжения на электроды 11, 12 вязкость электрореологической жидкости увеличивается в зоне действия приложенного напряжения, затворы 8, 9 оказывают сопротивление протекающей через них жидкости, что приводит к расширению сильфона 1, деформации основания 2, движению навстречу друг к другу губок 3 и сжатию ими предмета 4.
Сила сжатия зависит от давления, создаваемого насосом 5, а также от величины сопротивления, оказываемого току жидкости затворами 8, 9, то есть от приложенного к управляющим электродам напряжения. Величину напряженности электрического поля для создания необходимой степени загустения жидкости в затворах 8, 9 выбирают в пределах 10 - 20 В/мм.
Последнее обстоятельство позволяет прецезионно изменять степень воздействия схвата на предмет (усилие обжатия).
Время изменения вязкости электрореологической жидкости при подаче напряжения составляет 10-2-10-4 с, что позволяет оперировать предложенным схватом с большим быстродействием и использовать при проектировании возможности микропроцессорной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ШАГА ВИНТОВОЙ ПЕРЕДАЧИ И СПОСОБ РЕГУЛИРОВАНИЯ ШАГА ВИНТОВОЙ ПЕРЕДАЧИ | 1991 |
|
RU2029184C1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ СВЯЗАННЫХ С ПОДСОЗНАНИЕМ ПСИХИЧЕСКИХ ЯВЛЕНИЙ | 1999 |
|
RU2149668C1 |
| ЧАСЫ С ДОПОЛНИТЕЛЬНОЙ ФУНКЦИЕЙ | 1999 |
|
RU2147374C1 |
| Способ реконфигурации многоподвижного звена манипулятора | 1988 |
|
SU1678603A1 |
| Пресс непрерывного действия (его варианты) | 1981 |
|
SU1017508A1 |
Схват манипулятора для повышения надежности в работе содержит полость, заполненную электрореологической жидкостью, являющейся рабочим телом сильфона, а трубопровод на отводящих участках снабжен связанными с электродами электрореологическими затворами. 2 з.п.ф-лы, 1 ил.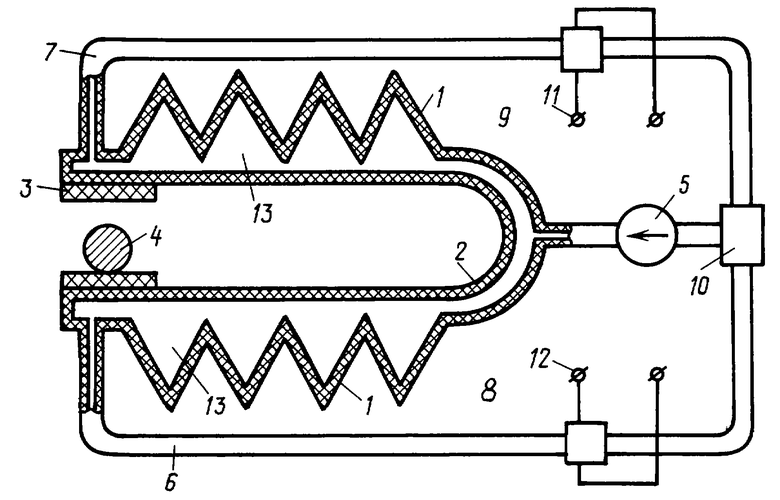
| Захват автоматического манипулятора | 1981 |
|
SU988550A1 |
| УСТРОЙСТВО И СПОСОБ ПРЕДВАРИТЕЛЬНОЙ ОБРАБОТКИ ТОПЛИВА | 1995 |
|
RU2168029C2 |
| US 3963271 A, 15.06.1976 | |||
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| DE 2925238 B1, 11.12.1980. | |||

