Изобретение относится к машиностроению, а более конкретно к схватам манипуляторов.
Цель изобретения - расширение технологических и функциональных возможностей, повышение надежности работы схвата.
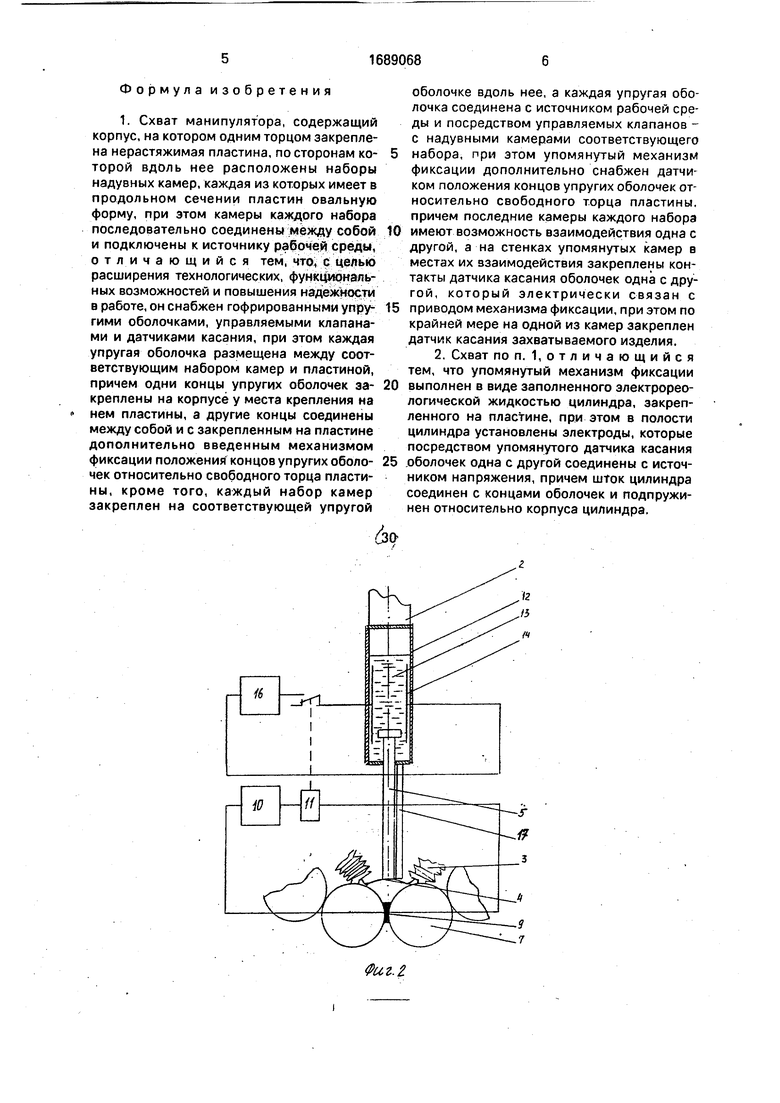
На фиг. 1 показана конструкция схвата манипулятора; на фиг. 2 - конструкция механизма фиксации со структурной схемой системы управления схвата; на фиг. 3 - схема работы схвата.
Схват манипулятора содержит корпус 1, нерастяжимую пластину 2, один торец которой закреплен на корпусе 1. По обе стороны пластины расположены гофрированные упругие оболочки 3, одни концы которых связаны с пластиной 2, а другие соединены гибкой перемычкой 4 между собой и со штоком 5 механизма 6 фиксации концов оболочек 3 относительно свободного торца пластины 2. С гофрированными оболочками 3 связаны надувные эластичные камеры 7 овальной формы, соединенные друг с другом. На одной из камер 7 установлен датчик 8 касания поверхности захватываемого изделия. Две последние камеры 7 снабжены датчиком 9 касания камер друг друга. Датчик 9 связан электрически с механизмом 6 фиксации и источником 10 напряжения (фиг. 2). В качестве датчика 9 могут быть использованы, например, два металлических контакта, один из которых связан с обмоткой реле 11 механизма 6 фиксации (фиг. 2), а другой - с источником 10 напряжения. Механизм б состоит из цилиндра 12, жестко закрепленного на краю пластины 2, внутри цилиндра расположен шток 5, конец которого связан с гибкой перемычкой 4, связывающей оболочки 3. С другой стороны шток 5 контактирует с электрореологической жидкостью 13, в контакте с которой находятся электроды 14. Пружина 15 удерживает перемычку и шток 5 в положении минимальной удаленности от торца пластины 2. Электроды 14 связаны с источником 16 напряжения через контакты реле 11. На штоке 5 расположен датчик 17 положения концов упругих оболочек относительно торца пластины. Внутри каждой камеры расположен управляемый клапан (например, электромагнитный) подачи рабочей среды от источника рабочей среды (не показан) через гофрированные оболочки 3 в камеры 7. Изделие 18 удерживается за внутреннюю поверхность. Схват манипулятора работает следующим образом.
В исходном положении рабочая среда удалена из камер 7 через клапаны и гофрированные оболочки 3 вследствие сжатия
эластичных камер 7. Датчик 9 касания обеспечивает реле, контакты реле замкнуты, вследствие этого электроды 14 под напряжением, и электрореологическая жидкость
13 в твердом состоянии фиксирует положение штока 5 относительно цилиндра 12, а значит и концы оболочек 3 относительно торца пластины 2, схват вводится роботом в отверстие захватываемого изделия 18, на0 пример стеклянного плафона. Для захвата изделия через открытые клапаны подается рабочая среда. Эластичные камеры 7 увеличиваются в размерах. Увеличение камер 7 будет сопровождаться изгибом набора ка5 мер и изгибом оболочек 3 относительно пластины 2, пока оболочки 3 не примут форму правильного круга. При этом произойдет касание последних камер 7 и срабатывание датчика 9. Контакты реле 11 разомкнутся и
0 электроды 14 обесточатся, электрореологй- ческая жидкость 13 окажется в жидкой фазе, 5 будет иметь возможность продольного перемещения внутри цилиндра 6, выдвигаясь вместе с деформируемыми
5 оболочками 3. при этом камеры 8 будут раздуваться, пока не образуют кольцо, касающееся стенок изделия, при этом датчик 8 сработает, клапаны внутри камер 7 закроются. Изделие зажато эластичными камера0 ми и готово к транспортировке. Датчик 17 при этом фиксирует расстояние от торца пластины до перемычки 4, тем самым однозначно определяя внутренние размеры изделия 18 (при известных размерах штока 2,
5 оболочек 3, камер 7).
Для освобождения изделия клапаны в камерах 7 открываются, рабочая среда под действием упругих стенок камер 7 выталкивается из камер. Диаметр кольца из камер
0 уменьшается за счет упругих свойств оболочек 3, при этом пружиной 15 шток 5 возвращается в исходное положение. Дальнейшее уменьшение объема камер приводит к размыканию контактов датчика 9 касания, кото5 рый разрывает цепь обмотки реле 11, при этом электрореологическая жидкость 13 фиксирует шток 5 относительно цилиндра 12. Гофрированные оболочки 3 возвращаются в исходное положение.
0 Предлагаемый схват позволяет захватывать хрупкие детали с шарообразными полостями разных размеров, обеспечивая равномерность и минимальное давление на деталь. Он обладает повышенной надежно5 стью, разрыв одной из камер не вызывает перемещения захваченной детали. Схват не повреждает поверхность детали. Схват имеет расширенные функциональные возможности, позволяет определять размер полости захватываемых деталей.
Формула изобретения
1. Схват манипулятора, содержащий корпус, на котором одним торцом закреплена нерастяжимая пластина, по сторонам ко- торой вдоль нее расположены наборы надувных камер, каждая из которых имеет в продольном сечении пластин овальную форму, при этом камеры каждого набора последовательно соединены между собой и подключены к источнику рабочей среды, отличающийся тем, что, с целью расширения технологических, функциональных возможностей и повышения надежности в работе, он снабжен гофрированными упру- гими оболочками, управляемыми клапанами и датчиками касания, при зтом каждая упругая оболочка размещена между соответствующим набором камер и пластиной, причем одни концы упругих оболочек за- креплены на корпусе у места крепления на нем пластины, а другие концы соединены между собой и с закрепленным на пластине дополнительно введенным механизмом фиксации положения концов упругих оболо- чек относительно свободного торца пластины, кроме того, каждый набор камер закреплен на соответствующей упругой
оболочке вдоль нее. а каждая упругая оболочка соединена с источником рабочей среды и посредством управляемых клапанов - с надувными камерами соответствующего набора, при этом упомянутый механизм фиксации дополнительно снабжен датчиком положения концов упругих оболочек относительно свободного торца пластины, причем последние камеры каждого набора имеют возможность взаимодействия одна с другой, а на стенках упомянутых камер в местах их взаимодействия закреплены контакты датчика касания оболочек одна с другой, который электрически связан с приводом механизма фиксации, при этом по крайней мере на одной из камер закреплен датчик касания захватываемого изделия.
2. Схват по п. 1,отличающийся тем, что упомянутый механизм фиксации выполнен в виде заполненного электрореологической жидкостью цилиндра, закрепленного на пластине, при этом в полости цилиндра установлены электроды, которые посредством упомянутого датчика касания оболочек одна с другой соединены с источником напряжения, причем шток цилиндра соединен с концами оболочек и подпружинен относительно корпуса цилиндра.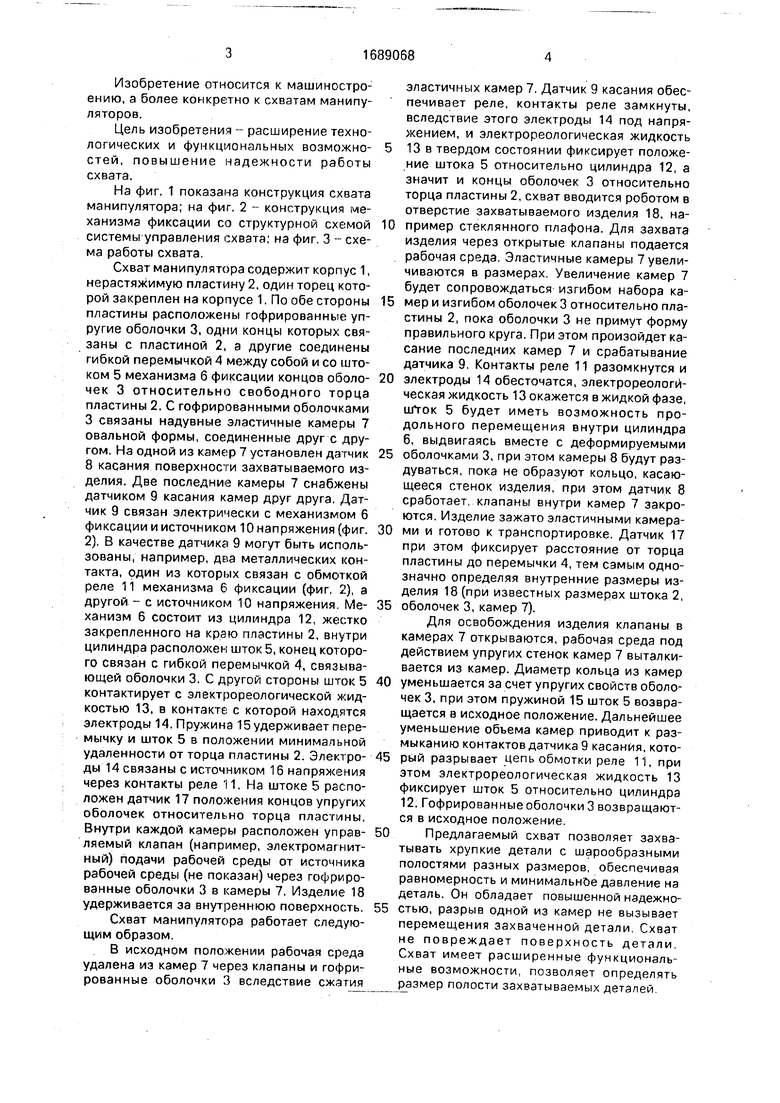
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1445949A1 |
| Пневматический захват | 1989 |
|
SU1785893A1 |
| Схват манипулятора | 1986 |
|
SU1404333A1 |
| Манипулятор | 1988 |
|
SU1569222A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ СБОРКИ ТВЭЛ ДЛЯ ЭНЕРГЕТИЧЕСКИХ ЯДЕРНЫХ РЕАКТОРОВ ТИПА БН | 1994 |
|
RU2094866C1 |
| Схват промышленного робота | 1983 |
|
SU1093545A1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Форма для заливки теплоизоляции из вспенивающихся материалов в шкафы холодильников | 1988 |
|
SU1549778A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
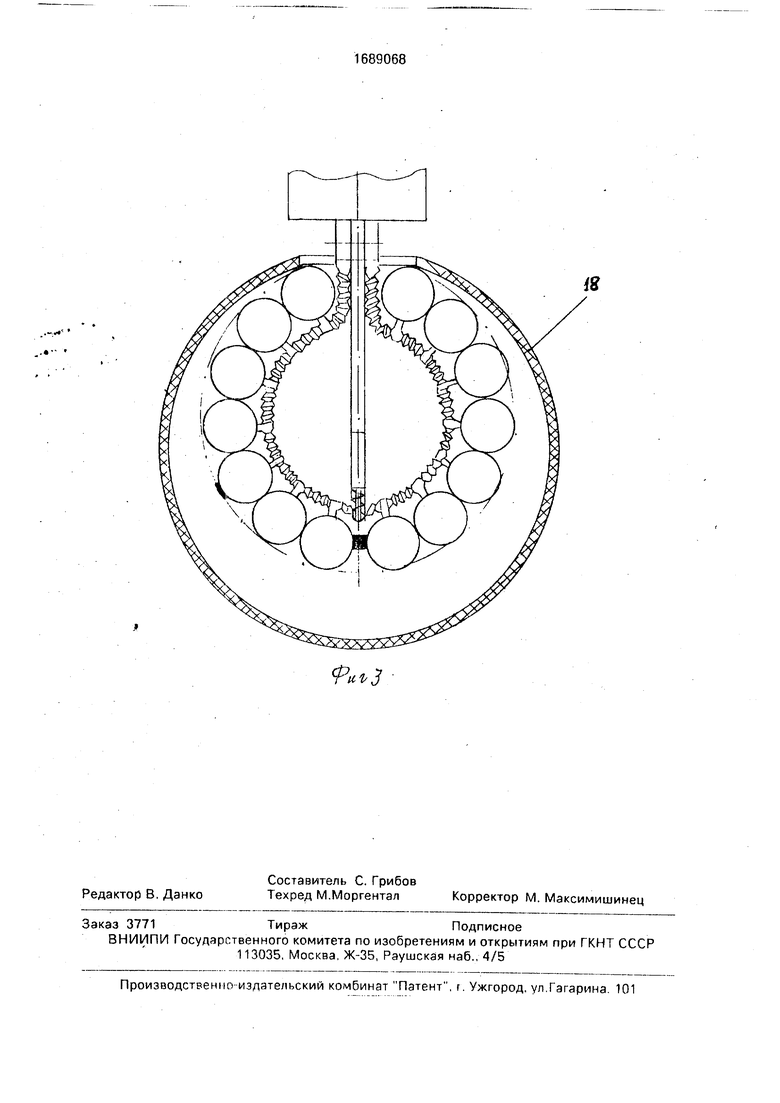
Изобретение относится к машиностроению, в частности к захватным устройствам, Целью изобретения является повышение надежности работы и расширение технологических, функциональных возможностей. Для этого наборы надувных камер 7 закреплены на упругих гофрированных оболочках 3 Одни концы оболочек закреплены на корпусе 1, другие упругой перемычкой 4 соединены между собой и со штоком 5 цилиндра. Оболочки 3 соединены с источником рабочей среды и через управляемые клапаны с камерами 7. На цилиндре установлен датчик положения концов упругих оболочек относительно торца пластины 2, жестко закрепленной на корпусе 1. Камеры снабжены датчиком 8 касания изделий и датчиком 9 касания камер друг с другом. При захвате изделия камеры 7 раздуваются, при этом наборы камер принимают кольцевую форму. После срабатывания датчика 9 шток 5 освобождается и пружиной 15 выталкивается из цилиндра. После срабатывания датчика 8 прекращается подача рабочей среды в камеры 7. По положению штока 5 определяются размеры изделия. 1 з.п. ф-лы, 3 ил. « е Os 00 ю о о 00 3 Риг.1
Фиг 2
.--
fwj
| Захват манипулятора | 1984 |
|
SU1222547A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
