1 Изобретение относится к машиностроению, в частности к захватным устройствам манипуляторов.
Известен захват автоматического манипулятора содержащий рабочую камеру, связанную с источником давления, фиксирующую камеру, выполненную из эластичного материала и заполненную электрореологической суспензией и твердым наполнителем, а также установленные в фиксирующей камере электроды, цепь питания которых связана с источником тока 1.
Недостатком известного устройства является невозможность использования захвата для работы с деталями, имеющими сложную форму и выполненных из различных по механическим свойствам материалов, так как невозможно создать соответствующее усилие зажима для каждого типа деталей.
Цель изобретения - расщирение технологических возможностей с одновременным повышением надежности.
Указанная цель достигается тем, что в цепи питания электродов установлено реле давления, а в фиксирующей камере расположена дополнительно введенная измерительная камера, выполненная из эластичного материала, заполненная рабочей средой и связанная с реле давления.
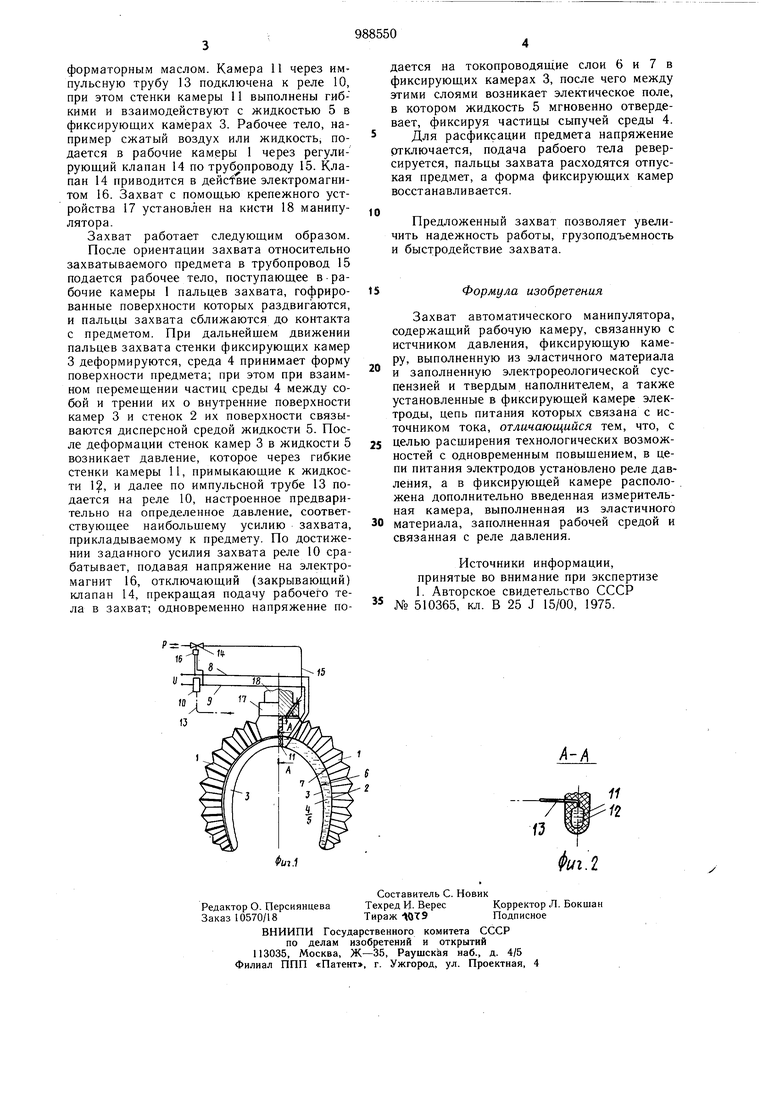
На фиг. 1 показана конструкция захвата автоматического манипулятора; на фиг. 2 сечение А-А на фиг. 1.
Захват состоит из эластичных гофрированных рабочих камер I с гладкими гибкими внутренними стенками 2, являющими10 ся общими для рабочих камер 1 и фиксирующих камер 3, заполненных сыпучей средой 4, например, из пен ополистирола, в которую введена электрореологическая жидкость (суспензия) 5. Внутренние поверхности фиксирующих камер 3 покрыты токо15 проводящими слоями 6 и 7 из гибкого материала, например из бериллиево-бронзовой фольги, причем оба слоя 6 и 7 не имеют внутри камер 3 электрического контакта между собой и подключены к источ20 нику напряжения (блоку электропитания) проводникам 8 и 9 через управляющее реле давления 10. В неподвижной части захвата между его пальцами раз иеще.на измерительная камера 11, заполненная жидкостью 12, например транс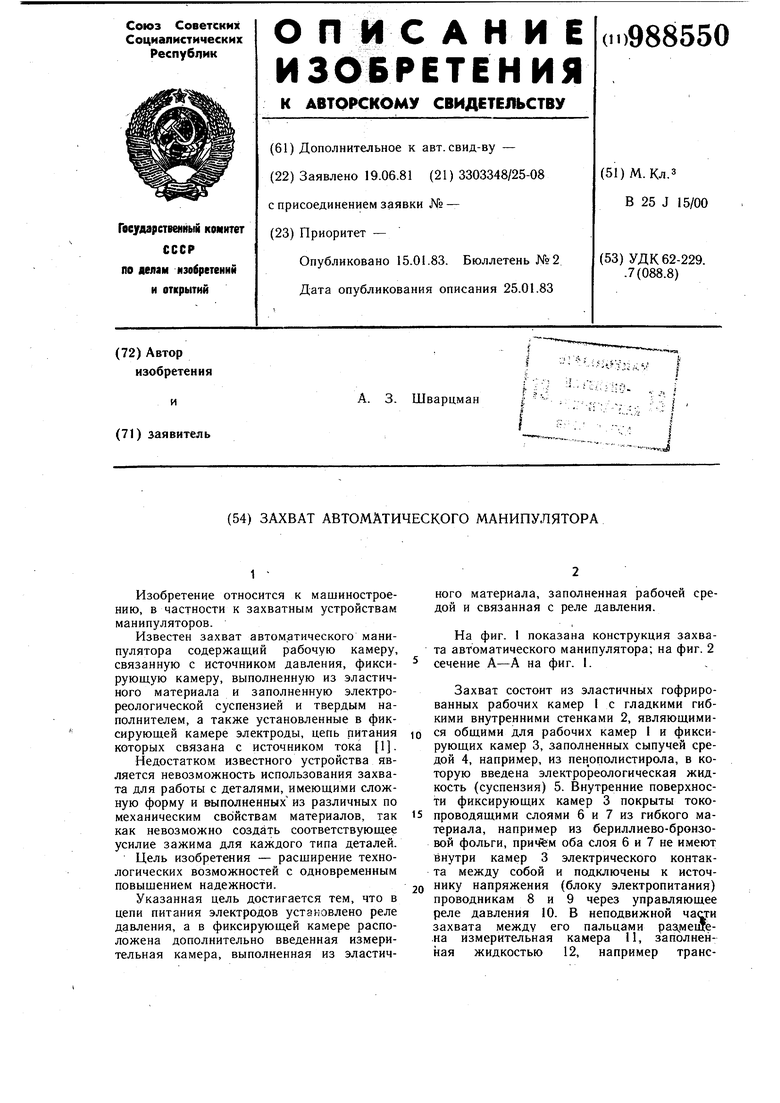
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват автоматического манипулятора | 1986 |
|
SU1421531A2 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Пневмоцилиндр | 1983 |
|
SU1201565A1 |
| Тактильный сенсор промышленного робота | 1981 |
|
SU1074711A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Мембранный привод | 2017 |
|
RU2668307C1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
| Устройство для определения азимутального и зенитного углов скважины | 1982 |
|
SU1090863A1 |
| Пресс непрерывного действия (его варианты) | 1981 |
|
SU1017508A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
