Изобретение относится к захватным устройствам промышленных роботов и может быть использовано ддя перемещения предметов различной формы.
Целью изобретения является упрощение Конструкции, упрощение управления и расширение технологических возможностей.
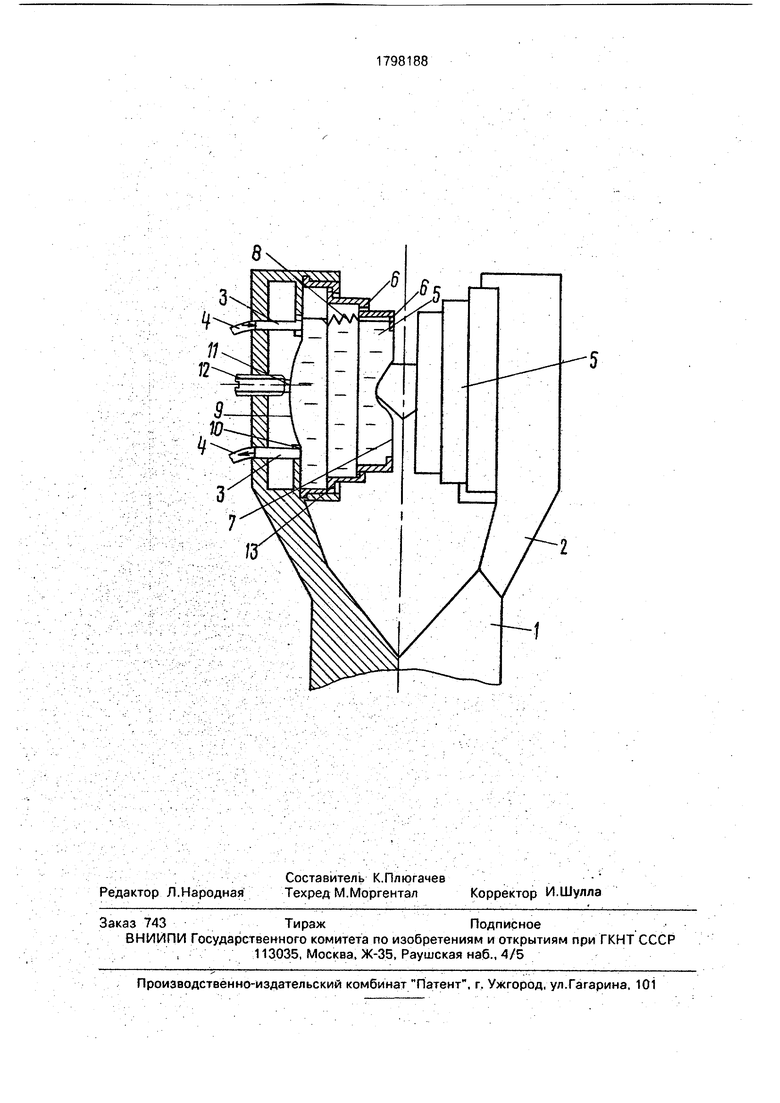
На чертеже показан схват промышленного робота, общий вид с деталью.
Схват содержит корпус 1 с неподвижными относительно него губками 2. В губках 2 выполнены отверстия 3 для подвода и слива рабочей среды, например электрореологической жидкости. Отверстия 3 губок с помощью эластичных съемных шлангов 4 соединены с источником рабочей среды (не показан). Баллоны губок 2 выполнены в виде наборов телескопических элементов 5, закрепленных на губках 2. Каждый из элементов набора имеет по обоим краям кольцевые выступы 6 по разные стороны от оси элемента для зацепления элементов в наборе, выполнены с различными диаметрами и вставлены с возможностью перемещения друг относительно друга. Последние телескопические элементы с рабочей стороны схвата оснащены эластичными оболочками 7 и подпружинены к губкам 2 с помощью пружин 8. Ближние к губке 2 телескопические элементы оснащены электродами 9. Электроды 9 выполнены а виде пластины из другого материала, изолированы от губок и самих элементов 5 с помощью прокладок 10 и установлены с зазором относительно губок. В зазоре между электродами 9 (первый контакт) и губками 2 расположены вторые изолированные контакты 11. Контакт 11 закреплен на винте 12с возможностью фиксации в разных положениях относительно электродов 9 и подключен к плюсовому выводу блока питания, например источника постоя иного тока типа Б5-43, Второй полюс блока питания подключен к набору элементов 5. Для предотвращения подтеков жидкоXJ
ю
СО
СО 00
сти в местах стыка элементов 5 установлены сальники 13.
Устройство работает следующим образом..
В исходном положении телескопические элементы 5 сведены силой натяжения пружин 8, контакты 9 и 11 разомкнуты, клапаны каналов подвода и слива жидкости закрыты, между губками 2 имеется зазор. Для захватывания предмета схват вводят в рабочую зону.
В баллоны губок 2 через открытый клапан подачи и отверстие 3 начинают подавать электрореологическую жидкость под давлением. В результате давления жидкости на кольцевые выступы элементов 5 последние выдвигаются до упора, преодолевая натяжение пружины 8, эластичные оболочки охватывают предмет. При дальнейшем поступлении жидкости деформируется пластина электрода 9 до соприкосновения с контактом 11. При замыкании контактов под действием напряжения от источника электрического тока меняется вязкость электрореологической жидкости и оболочка принимает форму предмета.
При переносе детали и выключений источника питания жидкость из баллонбв через открытый клапан слива удаляется из баллонов, элементы 5 выдвигаются под действием пружин 8, контакты 9,11 размыкаются схват приводится в исходное положение.
В сравнении с прототипом предлагаемое устройство обладает расширенными технологическими возможностями при более простой конструкции, обеспечивая
удержание предметов без дополнительных нагрузок на поверхность.
Формула изобретения
1. Схват промышленного робота, содержащий губки, на каждой из которых установлена эластичная оболочка, образующая с поверхностью губки полость, заполненную электрореологичёской жидкостью, и электроды, подключенные к источнику питания,
при этом а корпусе каждой губки установлены трубопроводы для слива и подачи элект- рореологической жидкости, отличающийся тем, что, с целью расширения функциональных возможностей и упрощения конструкции, один из электродов каждой губки выполнен в виде блока телескепиче.ских элементов, торец первого из которых закреплен на корпусе губки, а на торце последнего закреплена эластичная оболочка,
при этом последний элемент подпружинен относительно корпуса губки, а элементы блока имеют возможность ограниченного перемещения относительно друг друга, при этом второй электрод выполнен в виде упругой мембраны, установленной в упомянутой полости на корпусе губки, при этом мембрана электрически изолирована от корпуса и образует с ним дополнительную полость, причем мембрана имеет возможность взаимодействия с дополнительно введенным конечным выключателем, установленным в дополнительной полости на корпусе губки и включенным в цепь источника питания.
2. Схват по п.1, о т л и ч а ю щ и и с я тем, что конечный выключатель установлен с возможностью перемещения и фиксации относительно мембраны.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1986 |
|
SU1445949A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
| Схват промышленного робота | 1983 |
|
SU1093545A1 |
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Губка схвата манипулятора | 1989 |
|
SU1798181A1 |
| Схват манипулятора | 1988 |
|
SU1576310A1 |
| Мембранный привод | 2017 |
|
RU2668307C1 |
Использование: для перемещения предметов различной формы. Сущность изобретения: баллоны губок схвата выполнены в виде набора телескопических элементов, один из которых оснащен со стороны рабочей зоны схвата эластичной оболочкой, а другой оснащен электродом. В зазоре между электродом и губкой установлен выключатель, При подаче электрореологической жидкости под давлением в баллоны элементы выдвигаются из набора, охватывая оболочками предмет. При .срабатывании выключателя под действием напряжения от источника питания меняется вязкость жидкости и оболочки принимают форму предмета. 1 з.п.ф-лы, 1 ил.,
| Захват промышленного робота | 1982 |
|
SU1237427A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
