Фие.1
Изобретение относится к машиностроению, в частности к робототехнике,
Целью изобретения является автоматизация процесса реконфигурации много- подвижного звена манипулятора,
На фиг.1 приведен кинематическая схема манипулятора с многоподвижным последним звеном, на фиг,2 - схема выполнения многоподвижного звена.
Манипулятор содержит основание 1, кинематически связанные звенья 2 - 5 и многоподвмжное последнее звено, состоящие из двух частей 6 и 7, выполненных с возможностью взаимного перемещения вдоль и поворота вокруг оси звена, Рабочий орган (схваг) 8 закреплен на части 7 звена, Фиксация взаимного положения частей последнего звена может осуществляться фиксатором 9, манипулятор снабжен по числу звеньев приводами их перемещения (не по- казаны). Упорный элемент 10 закреплен в рабочей зоне манипулятора неподвижно относительно основания 1. Многоподвижное звено может быть выполнено в виде гибкой оболочки 11, например резиновой, Оболоч- ка заполнена электрореологической жидкостью 12, Внутри оболочки расположены гибкие электроды 13, связанные с источником напряжения (не показан),
Способ осуществляется следующим об- разом.
Производят фиксацию схвата относительно основания 1. Для этого звенья манипулятора принимают положение, при котором упорный элемент 10 находится между губками схвата 8, и осуществляется смыкание губок схеата. Далее подается сигнал фиксатору 9 на расфиксацию взаимного
положения частей б и 7 многоподвижного последнего звена. Управляемым движением звеньев манипулятора относительно зафиксированной части 7 последнего звена и основания 1 производят требуемое изменение параметров (размеров, формы) много- подвижного эвена, после чего прекращают движение. Фиксаторы 9 осуществляют фиксацию нового взаимного положения частей 6 и 7, а следовательно, и новой формы и размеров многоподзижного звена, после чего губки схвата 8 разжимаются и манипулятор с измененными параметрами многоподвижного звена готов к работе.
Фиксацию формы многоподвижного звена с электрореологической жидкостью осуществляют путем подключения электродов 13 к источнику напряжения, а расфиксацию путем отключения электродов от источника напряжения.
Предлагаемый способ позволяет автоматизировать изменение параметров манипулятора и тем самым существенно расширить их технические возможности.
Формула изобретения
Способ реконфигурации многоподвижного звена манипулятора, заключающийся в расфиксации частей этого звена, изменении его формы или размеров путем приложения внешних сил и последующей фиксации этих частей, отличающийся тем, чт о, с целью автоматизации процесса реконфигурации, до расфиксации частей звена рабочий орган манипулятора закрепляют на неподвижном относительно манипулятора основании, а изменение формы или размеров звена осуществляют путем соответствующих перемещений остальных звеньев манипулятора.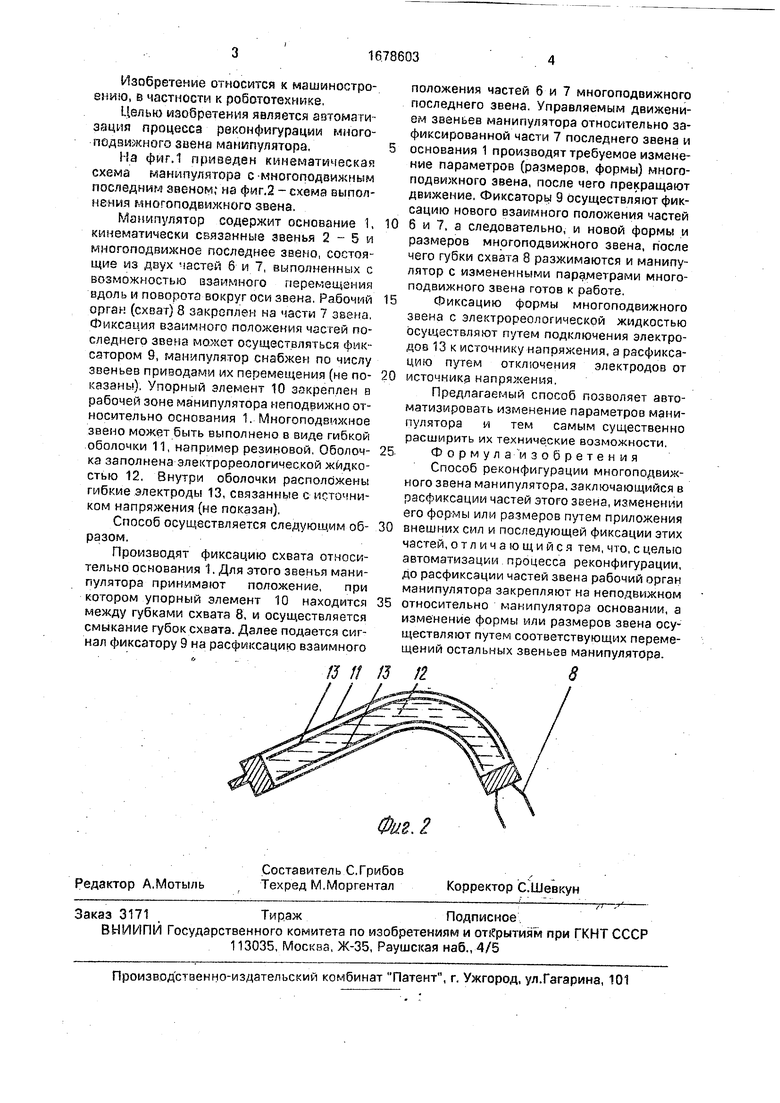
| название | год | авторы | номер документа |
|---|---|---|---|
| Реконфигурируемый робототехнический комплекс | 1990 |
|
SU1812096A1 |
| СПОСОБ ПРОГРАММИРОВАНИЯ РЕКОНФИГУРИРУЕМОГО МАНИПУЛЯТОРА | 1991 |
|
RU2043914C1 |
| Способ реконфигурации многозвенного манипулятора | 1990 |
|
SU1812098A1 |
| Манипулятор | 1990 |
|
SU1805029A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Механическая рука манипулятора | 1986 |
|
SU1414626A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Манипулятор | 1986 |
|
SU1333570A1 |
| Привод схвата манипулятора | 1984 |
|
SU1266737A1 |
| Манипулятор | 1989 |
|
SU1673429A1 |
Изобретение относится к машиностроению, конкретнее к робототехнике. Цель изобретения - автоматизация процесса реконфигурации многоподвижного звена манипулятора. Закрепляют на неподвиж- .ном относительно манипулятора основании 1 рабочий орган 8, Производят расфикса- цию взаимного положения частей 6 и 7 многоподвижного последнего звена. Изменяют форму или размер этого звена путем соответствующих перемещений остальных звеньев манипулятора. Осуществляют фиксацию нового взаимного положения частей 6 и 7. 2 ил,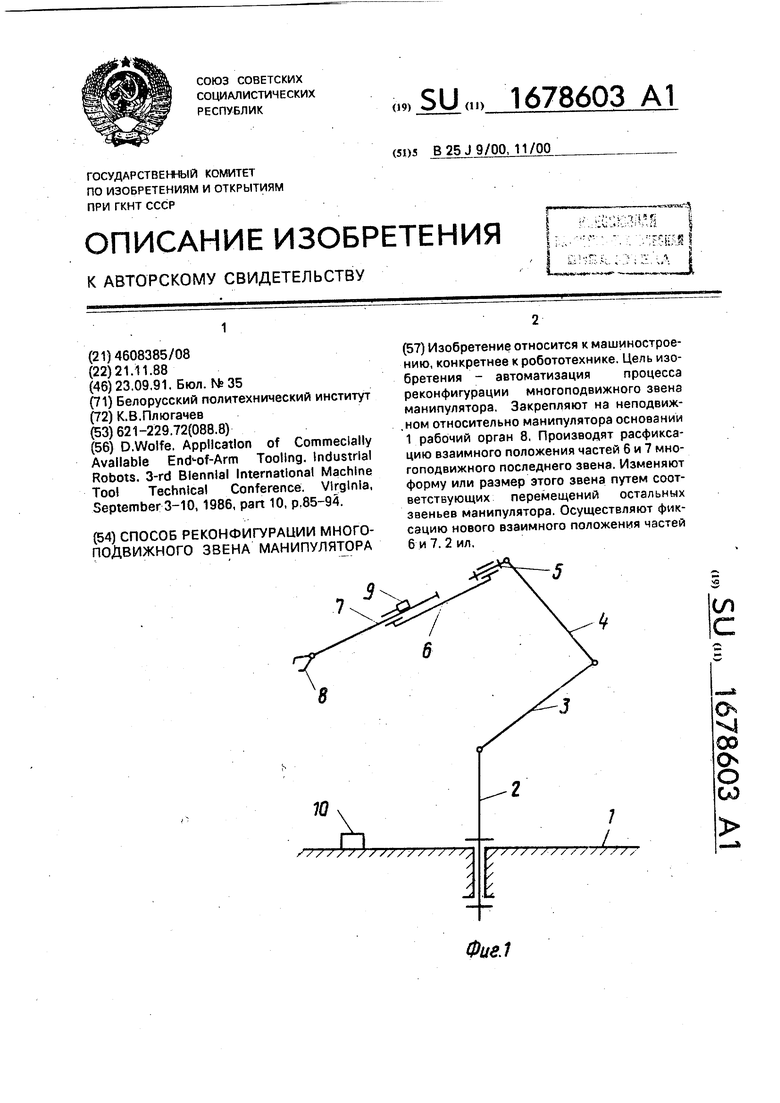
/J // /J 12
Фиг. 2
| D.Wolfe | |||
| Application of Commectally Available End -of-Arm Tooling | |||
| Industrial Robots | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Virginia, September 3-10, 1986, part 10, p.85-94. | |||
