Изобретение относится к области горной промышленности и строительства, а именно к способу исключения вибрации в гидравлических ударных механизмах, применяемых в качестве инструмента динамического действия с широким диапазоном выполняемых работ, но может быть использовано и при проектировании навесного оборудования экскаваторов и других устройств ударного действия, а так же в других машинах и механизмах, работающих в динамическом режиме с разгоном рабочей массы на удар в корпусе машины.
Известен ряд машин и механизмов, где под действием механической, гидравлической, пневматической или другой энергии рабочий орган разгоняется до определенных значений скоростей для динамического воздействия на рабочий инструмент или обрабатываемый материал.
В настоящее время большое распространение получили ручные пневматические и электромеханические инструменты ударного действия, например отбойные, рубильные, клепальные и другие молотки, трамбовки, перфораторы и т.д., которые наряду с определенными преимуществами обладают и значительными недостатками, основными из которых являются сильная вибрация, большие шумовые нагрузки, высокая металлоемкость и невысокий КПД.
Все это обусловило переход к использованию гидравлических ударных механизмов в подобном оборудовании. Однако, как правило, эти механизмы имеют плохую виброзащиту из-за высокой частоты ударов рабочего механизма.
Вибрация ударных механизмов так же, как и откат (отдача) артиллерийских орудий, происходит по одному и тому же закону.
Сущность вибрации (отката) состоит во взаимном противоположном перемещении подвижной массы и корпуса механизма по закону перемещающихся масс или количеству движения (mV = Pt), равному импульсу силы, где сила импульса равна давлению энергоносителя (или силе пружины) на площадь торца подвижной массы и на площадь ствола (камеры) корпуса механизма. Таким образом, величина вибрации зависит от соотношения подвижной массы и массы корпуса.
Существуют различные способы уменьшения вибраций. К ним относятся амортизаторы различного вида, а так же способы динамического уравновешивания.
Для снижения вибрации, передаваемой на руки оператора ручной машины, в некоторых случаях приходится искусственно понижать частоту работы механизма, как это сделано в машине по патенту США 3788404. Однако такое выполнение виброзащиты приводит к потере мощности машины, т. е. снижению производительности. Другая схема виброзащиты построена на синхронном с рабочей массой перемещении дополнительной массы, расположенной соосно с рабочей массой и перемещающейся с ней в противофазе. Такая схема применена в устройстве по пат. США 4460051. Эта схема позволяет частично сгладить вибрации корпуса, но полностью исключить вибрацию не удается, т. к. дополнительная колеблющаяся масса перемещается со своей частотой, отличной от частоты рабочей массы.
Наиболее близким к настоящему изобретению является способ исключения вибрации устройств ударного действия, содержащих корпус, подвижную массу-боек, коаксиально расположенную втулку, выполняющую роль дополнительной массы-бойка, клапан и шток, известный из авторского свидетельства 905048, Кл. E 21 C 3/00, 25.02.82.
Недостатком этого способа исключения вибрации является передача усилия отдачи на корпус, хотя и в значительно меньшем виде. Однако этот способ не позволяет полностью исключить вибрацию корпуса инструмента.
В основу изобретения положено решение задачи созданий такого способа исключения вибрации в устройствах ударного действия, преимущественно гидравлических ударных механизмов, который обеспечивает получение высоких энергетических показателей при полном исключении вибраций и достаточно простой и надежной схеме гидрораспределения.
Технический результат, который может быть получен при реализации настоящего изобретения, заключается в том, что создается надежный ударный механизм повышенной виброзащищенности, который может быть использован при разработке ударных машин различных классов и различного предназначения.
Поставленная задача решена за счет того, что в способе исключения вибрации устройств ударного действия, содержащих корпус, подвижную массу-боек, коаксиально расположенную втулку, клапан, шток и дополнительную массу, дополнительную массу выполняют в виде балансиров аккумулятора, а при движении на разгон подвижной массы-бойка устанавливают динамическое равновесие между количеством движения подвижной массы-бойка, равным ее импульсу силы и количеством движения суммарной дополнительной массы - балансиров аккумуляторов, имеющих противоположно направленное движение под действием импульса силы, создаваемой при разряжении аккумулятора.
Кроме того, дополнительную массу выполняют в виде как минимум двух поршней пружинных гидравлических аккумуляторов, а оси указанных поршней размещают параллельно и эквидистантно оси подвижной массы-бойка.
Указанная совокупность включает все существенные признаки, каждый из которых необходим, а все вместе достаточны для достижения заявленного технического результата.
Изобретение поясняется одним чертежом, где представлена схема гидравлического ударного механизма, работающего по предложенному способу.
Способ исключения вибрации заключается в следующем. Ударная масса-боек при своем перемещении в корпусе под действием давления энергоносителя проходит несколько фаз: взвод на удар, движение на разгон (рабочий ход), удар. Далее цикл повторяется. Согласно настоящему способу, при движении массы-бойка на разгон необходимо обеспечивать динамическое равновесие системы. Для этого вводится в систему дополнительная масса, которая на периоде движения на разгон производит воздействие на корпус с тем же импульсом силы, что и ударная масса-боек, но с противоположным знаком.
В этом случае динамическое равновесие системы соблюдают путем обеспечения работы механизма согласно уравнению:
m(к) • V(к) = * m(пм) • V(пм) = P • t,
где m(к) - масса механизма;
V(к) - скорость массы механизма;
*m(пм) - сумма подвижных масс (аккумулятора);
V(пм) - скорость подвижных масс (аккумулятора);
P - сила импульса;
t - время импульса.
Импульс силы, действующий на дополнительную массу - балансиры аккумулятора, возникает за счет гидравлического давления, действующего при разряжении аккумулятора.
Чтобы достичь более надежных результатов при осуществлении способа, целесообразно дополнительную массу выполнить в виде нескольких пружинных гидроаккумуляторов, поршни-балансиры которых при своем перемещении в корпусе устройства будут динамически уравновешивать рабочую массу-боек при ее движении на разгон. При этом целесообразно оси поршней-балансиров разместить параллельно и эквидистантно оси подвижной массы-бойка. Тогда динамическая система будет более уравновешена и при необходимости может быть поднастроена на более эффективную работу за счет подбора количества аккумуляторов и их параметров как при изготовлении механизма, так и при его настройке и работе.
Предлагаемый способ иллюстрируется конкретным примером выполнения рабочей гидроударной машины, которая реализует способ исключения вибрации.
Гидравлический ударный механизм (см. фиг.) содержит корпус 1, в котором размещена подвижная масса-боек 2 и механический гидроаккумулятор со штоком-плунжером 3, балансиром 4 и пружиной 5. Управление фазами автоматического цикла осуществляется дифференциальной втулкой 6, коаксиально размещенной на штоке 7 с возможностью ее возвратно-поступательного движения по штоку 7 в полости напора 8 и полости 9. Конец штока 7, расположенного в полости 8, имеет пояс увеличенного диаметра, который является гидрозахватом при нахождении его в полости 10. Другой конец штока 7 связан с подвижной массой-бойком 2.
Полость 9 попеременно при автоматическом цикле соединяется через канал 11 с полостью напора 8, а при открытии клапана 12 сообщается со сливом.
Взвод подвижной массы-бойка осуществляется следующим образом. Энергоноситель поступает в полость напора 8, которая в течение всей работы устройства находится под рабочим давлением.
Рабочая жидкость из полости напора 8 по каналу 11 попадает в полость 9. Клапан 12 закрыт, отсекая сливной канал. Давление жидкости, воздействуя на кольцо дифференциальной втулки 6, перемещает шток 7 с массой-бойком 2 до входа в полость 10, где перекрывается от напора канал 11. Одновременно боек 2 открывает клапан 12, соединяя полость 9 со сливом. При фазе взвод вытесненный штоком 7 объем рабочей жидкости в полости 8 посредством штоков-плунжеров 3 за счет вытесненного объема рабочей жидкости взводит аккумулятор, заряжая энергией пружину 5. Расход рабочей жидкости происходит при заполнении полости 9 от насосной станции. Спуск бойка на удар происходит следующим образом. Дифференциальная втулка 6 под действием давления на ее торец в полости 8 перемещается в полости 9, закрывая клапан 12 и канал 11. Во время движения дифференциальной втулки 6 шток 7 под воздействием давления на его пояс, расположенный в полости 8, удерживается в гидрозахвате полости 10, т. к. она в это время соединена через канал 1 со сливом. Разгон штока 7 с массой-бойком 2 на удар происходит под действием давления в полости 8 на его торец. Давление в полости 8 в это время создается и поддерживается энергией разряжающегося аккумулятора. Во время разгона массы-бойка на удар, расхода рабочей жидкости от насоса практически не происходит, т. к. скорость расхода ее в несколько раз больше производительности насоса. Расход восполняется движением штока 3 под действием пружины 5 в полость, гидравлически связанную с полостью 8, что позволяет значительно снизить мощность энергопитания. Движение массы аккумулятора под действием пружины 5, опирающейся на корпус 1, направлено в противоположную бойку сторону и создает импульс силы, действующий на корпус, равный, но противоположно направленный относительно импульса силы, создаваемого движущейся массой-бойком при ее разгоне на удар. Это обеспечивает равенство количества движения масс бойка 2 со штоком 7 и суммарной массы деталей аккумулятора (или аккумуляторов) и создает их динамическое равновесие. Динамическое равновесие импульсов сил, противоположных по знаку, определяет неподвижность корпуса привода (механизма), т.е. отсутствие отдачи, а при высокой частоте циклов - отсутствие вибрации.
Динамическое равновесие в данном случае выражается зависимостью
m(б) • V(б) = m(М) • V(М) = * m(a) • V(a) = P • t,
где m(б) - масса бойка;
V(б) - конечная скорость бойка;
m(M) - масса привода (механизма);
V(M) - скорость массы привода (механизма);
* m(a) - сумма масс аккумулятора;
V(a) - скорость масс аккумулятора;
P - сила импульса;
t - время импульса.
Отсутствие вибрации у гидравлического ударного динамически уравновешенного привода открывает возможность создания средств малой механизации, в 2-3 раза превышающих по энерговооруженности существующий инструмент. Делает этот инструмент более высокопроизводительным, с комфортными условиями труда, позволяет исключить виброболезнь, возникающую при работе с ударным инструментом. Простота энерговооружения - гидравлическая энергия от переносных насосных станций малой мощности, повышенная энерговооруженность ручного инструмента значительно расширяют область его применения во многих областях промышленности. Высокий КПД и малая металлоемкость позволяет экономить значительные средства от его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ УДАРНЫЙ ПРИВОД | 1998 |
|
RU2138635C1 |
| МОЛОТ ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 1993 |
|
RU2087712C1 |
| Гидропневматическое устройство ударного действия | 1976 |
|
SU600265A1 |
| СПОСОБ МНОГОСТУПЕНЧАТОГО ВЗВОДА, РАЗГОНА, УДАРА И УСТАНОВКА УДАРНОГО ДЕЙСТВИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ ПРИ РАЗРУШЕНИИ ГОРНЫХ ПОРОД | 2006 |
|
RU2325527C2 |
| ГИДРАВЛИЧЕСКИЙ МЕХАНИЗМ УДАРНОГО ДЕЙСТВИЯ | 2002 |
|
RU2229025C2 |
| Пневмогидравлическое ударное устройство | 1976 |
|
SU613095A1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| СПОСОБ ВЗВОДА, РАЗГОНА И НАНЕСЕНИЯ УДАРА СНАРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ ПРИ РАЗРУШЕНИИ РАЗЛИЧНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2291298C2 |
| Гидравлическое устройство ударного действия | 1979 |
|
SU870694A1 |
| Устройство для разрушения мерзлых грунтов | 1981 |
|
SU981523A1 |
Способ исключения вибрации устройств ударного действия относится к области горного дела и строительства и может быть использован при создании ручных ударных динамически уравновешенных механизмов или механизмов, предназначенных для использования в качестве навесного оборудования. Способ заключается в том, что при использовании ударных механизмов, содержащих корпус, подвижную массу-боек, коаксиально расположенные втулку, клапан и шток, в устройство вводят дополнительную массу балансиров аккумулятора. Эта дополнительная масса при движении на разгон подвижной массы-бойка позволяет устанавливать динамическое равновесие между количеством движения подвижной массы-бойка, равным ее импульсу силы, и количеством движения суммарной дополнительной массы-балансиров аккумуляторов, имеющих противоположно направленное движение под действием импульса силы, создаваемой при разряжении аккумулятора. Дополнительную массу выполняют также в виде нескольких пружинных гидравлических аккумуляторов с массами-поршнями, а оси указанных поршней размещают параллельно и эквидистантно оси подвижной массы-бойка. Способ позволяет исключить вибрацию, возникающую при работе устройств (машин) ударного действия. 1 з.п.ф-лы, 1 ил.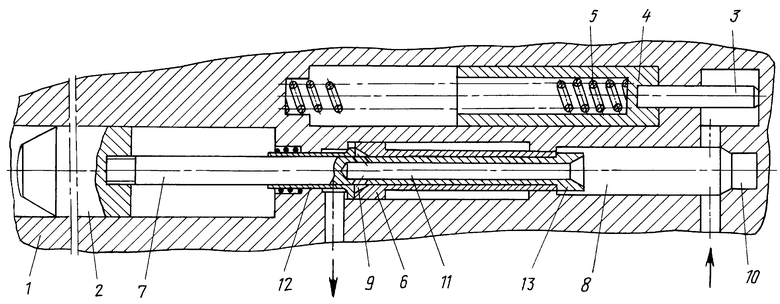
| Ударный инструмент | 1976 |
|
SU905048A1 |
| МЕХАНИЗМ УДАРНОГО ДЕЙСТВИЯ | 0 |
|
SU203593A1 |
| ГИДРАВЛИЧЕСКИЙ МОЛОТОК | 0 |
|
SU348723A1 |
| 1970 |
|
SU411204A1 | |
| Гидропневматическое устройство ударного действия | 1976 |
|
SU600265A1 |
| Гидравлическое устройство ударного действия | 1976 |
|
SU717312A1 |
| Гидравлическое ударное устройство | 1980 |
|
SU927996A1 |
| Гидравлический ударный механизм | 1980 |
|
SU953203A1 |
| Гидравлический ударный механизм | 1983 |
|
SU1102928A1 |
| ГИДРАВЛИЧЕСКИЙ УДАРНЫЙ МЕХАНИЗМ | 1992 |
|
RU2007562C1 |
