Заявленное изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации движущихся объектов.
Известен способ выработки навигационных параметров и вертикали места [1] . Этот способ включает измерение составляющих кажущегося ускорения при помощи акселерометов, формирование сигналов управления гироплатформой, отработку сформулированных сигналов при помощи гироскопа, выработку навигационных параметров вертикали места гироскопической системой.
Недостатком этого способа является ограниченность точности выработки выходных параметров.
Целью изобретения является создание условий повышения точности выходных параметров.
Цель достигается тем, что поворачивают гироплатформу с заданными частотными характеристиками вокруг осей, лежащих в плоскости гироплатформы.
Проиллюстрируем предлагаемый способ на следующем примере.
На чертеже представлена функциональная схема гироскопической системы, где приняты следующие обозначения:
1 - блок управления и выработки выходных параметров,
2 - гироплафторма,
3 - трехстепенной гироскоп,
4, 5 - датчики момента гироскопа,
6, 7 - датчики угла гироскопа,
8 - измеритель составляющей абсолютной угловой скорости,
9, 10, 11 - акселерометры,
12, 13 - следящие двигатели,
14, 15 - датчики углов качек,
16, 17 - блоки управления следящими двигателями,
18 - блок колебаний гироплатформой,
19 - дополнительная гироскопическая система.
Гироскопическая система содержит блок управления и выработки выходных параметров, выполняющий в том числе задачи фильтра 1, гироплатформу 2, на гироплатформе расположен трехстепенной гироскоп 3 с датчиками момента 4, 5 и датчиками угла 6, 7, измеритель составляющей угловой скорости, акселерометры 9, 10, 11, по осям карданного подвеса установлены следующие двигатели 12, 13 с датчиками угла качек 14, 15, следящие двигатели управляются блоками управления следящими двигателями 16, 17, блок колебаний гироплатформы 18, дополнительная гироскопическая система 19.
Гироскопическая система функционируют следующим образом:
гироплатформа 2 с помощью следящих двигателей 12, 13 по сигналам рассогласования датчиков угла 6, 7 гироскопа 3 все время удерживается в одной плоскости с кожухом гироскопа 3. По сигналам акселерометров 9, 10, 11 и измерителя составляющей абсолютной угловой скорости гироплатформа может удерживаться в плоскости горизонта или колебаться относительно нее по сигналам блока колебаний 18 путем создания необходимых моментов на датчики момента 4, 5 гироскопа 3.
Режим выделения и оценки погрешностей может быть различным: когда две или более гироплатформ колеблются с разными частотными параметрами по каждой оси или, например, одна из двух гироплатформ колеблется, а вторая находится в горизонте, т. е. в классическом невозмущенном состоянии. Это значит, что предлагаемый способ применим в том числе и тогда, когда в качестве опоры для взаимного выделения и оценки инструментальных и динамических погрешностей используется в качестве дополнительной любой тип известной гироскопической инерциальной системы.
При этом оцениваются и уменьшаются инструментальные погрешности и динамические погрешности асимптотическая устойчивость) как основной, так и дополнительной гироскопической систем.
В случае использования двух гироплатформ могут быть различные режимы работ, например одна гироплатформа колеблется вокруг оси OX, а вокруг OY не колеблется, вторая же гироплатформа колеблется вокруг оси OY, а вокруг оси OX не колеблется.
В качестве замеров могут быть использованы значения различных одноименных параметров.
Координты места ϕ и λ , скорость объекта V и курс объекта K автономно определяются как обычно по кинематическим уравнениям. Курс объекта и широта места дополнительно вырабатываются по горизонтальным составляющим приборного трехгранника с использованием информации от лага. Углы качек вырабатываются в блоке управления и выработки выходных параметров по сигналам датчиков углов качек с учетом заданных углов колебаний платформы θ и ψ .
С объектовым (корабельным) трехгранником Дарбу свяжем правую систему координат XYZ. Ось OZ вертикальна. С гироплатформой свяжем систему координат X1Y1Z1. Система координат X1Y1Z1 образуется из XYZ поворотом на угол ψ вокруг оси OX - оси бортовой качки и на угол вокруг оси OY1.
Направляющие косинусы между системами координат XYZ, X1Y1Z1 будут
Тогда
где  - показания акселерометров,
- показания акселерометров, - показания измерителя угловой скорости приборного трехгранника вокруг оси, перпендикулярной плоскости гироплатформы,
- показания измерителя угловой скорости приборного трехгранника вокруг оси, перпендикулярной плоскости гироплатформы, - управляющие сигналы трехстепенного гироскопа.
- управляющие сигналы трехстепенного гироскопа.
Углы θ и ψ - заданы. Так, например,
θ = θosinω1t;
ψ = ψosinω2t,
где θo, ψo, ω1 и ω2 - параметры модуляции колебаний.
Погрешности вырабатываемых параметров будут модулированы на частотах ω1 и ω2
Дополнительным вводом одной или более гироплатформ взаимная оценка динамических и инструментальных погрешностей системы может быть осуществлена по замерам
ε2= Ω
ε3= Ω
ε4= a
ε5= a
ε6= a
где i и j - номера гироплатформ,
или по разностям других одноименных параметров.
Источник информации:
[1] В.А.Беленький - Патент РФ N 2000544.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1997 |
|
RU2126136C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2138018C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2145058C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2001 |
|
RU2197716C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2002 |
|
RU2206067C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247324C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1995 |
|
RU2098763C1 |
| СТАБИЛИЗИРОВАННАЯ В ПЛОСКОСТИ ГОРИЗОНТА ГИРОПЛАТФОРМА | 1993 |
|
RU2047093C1 |
Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации движущихся объектов. Измеряют составляющие кажущегося ускорения. Формируют сигналы управления гироплатформой. Отрабатывают сформированные сигналы при помощи гироскопа. Создание условий повышения точности выходных параметров достигается принудительными колебаниями гироплатформы с заданными частотными характеристиками. 1 ил.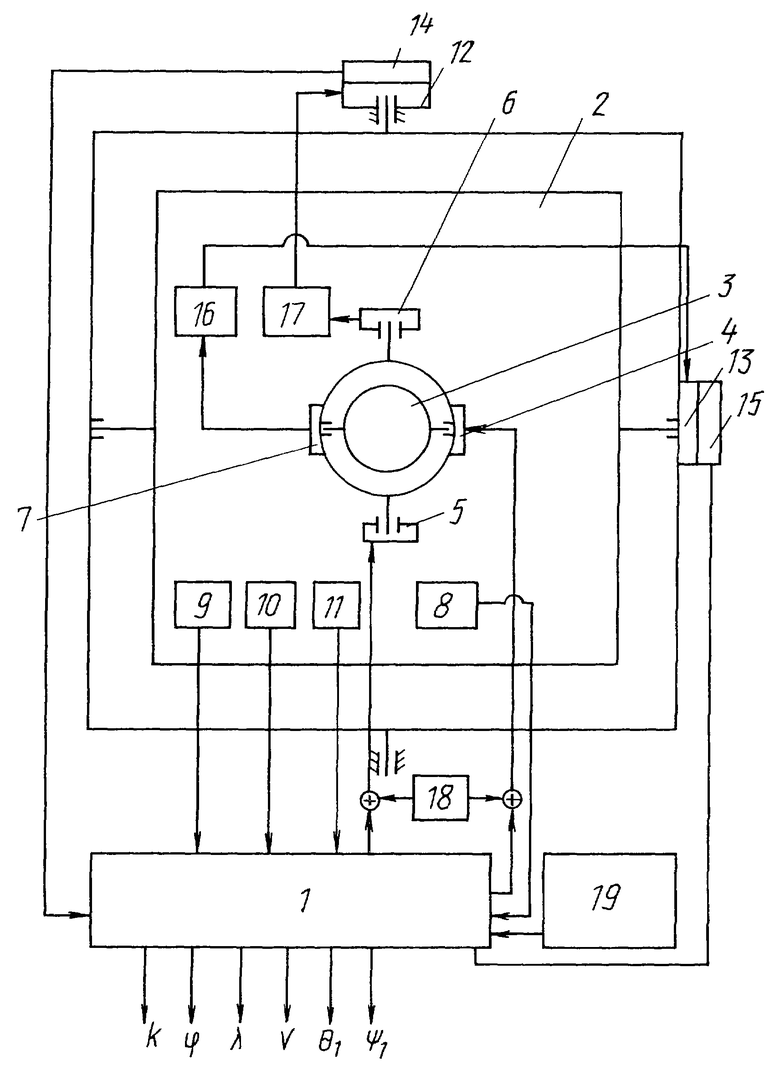
Способ выработки навигационных параметров и вертикали места, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа, выработку навигационных параметров и вертикали места гироскопической системой, отличающийся тем, что поворачивают гироплатформу с заданными частотными характеристиками вокруг осей, лежащих в плоскостях гироплатформы.
| RU 2000544 C, 07.09.93 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1991 |
|
RU2046289C1 |
| US 5359889 A, 01.11.94 | |||
| ПОДВЕСНОЙ СВОД МАРТЕНОВСКОЙ ПЕЧИ | 0 |
|
SU368457A1 |
