Изобретение относится к гироскопической технике, а более конкретно - к двухосным управляемым индикаторным гиростабилизаторам, работающим на подвижных объектах и предназначенным для стабилизации и управления линией визирования.
Известен способ повышения точности гиростабилизаторов за счет коррекции гиростабилизатора от прецизионного гироскопа (пат. Франции МПК5 G 01 C 19/26 1401395). В этом способе сигналы с гироскопа гиростабилизатора сравниваются с сигналами с прецизионного гироскопа, установленного на основании. Разности этих сигналов поступают на исполнительные двигатели гиростабилизатора.
Недостатком данного способа является то, что он мало компенсирует динамические погрешности, корректируя, в основном, медленный дрейф гиростабилизатора.
Наиболее близким является способ повышения точности двухосных гиростабилизаторов за счет компенсации возмущающих моментов от вязкого трения в осях подвеса наружной рамки и платформы. В этом способе определяют абсолютную угловую скорость и угловое ускорение движения основания относительно оси, параллельной оси вращения наружной рамки, определяют абсолютную угловую скорость и угловое ускорение движения наружной рамки относительно оси, параллельной оси вращения платформы, определяют компенсирующие сигналы для канала наружной рамки как сумму сигналов, пропорциональных угловой скорости и ускорению основания, и платформы как сумму сигналов, пропорциональных угловой скорости и ускорению наружной рамки, подают компенсирующие сигналы на исполнительные двигатели каналов наружной рамки и платформы (Бесекерский В.А., Фабрикант Е.А. Динамический синтез систем гироскопической стабилизации. - Л. : Судостроение, 1968, стр. 105-124).
Недостатком данного способа является то, что он компенсирует лишь часть действующих на платформу возмущающих моментов. Этот способ также не учитывает дополнительных возмущений, действующих в режиме управления.
Известны двухосные управляемые гиростабилизаторы, содержащие наружную рамку, установленную на основании с вращением относительно оси, перпендикулярной основанию, и расположенную в ней платформу, вращающуюся относительно оси перпендикулярной оси вращения наружной рамки, установленные на осях вращения наружной рамки и платформы исполнительные двигатели, входы которых соединены через усилители с выходами установленного на платформе гироскопического датчика угла (ГДУ), входы которого соединены с управляющим устройством (Неусыпин А. К. Гироскопические приводы. - М.: Машиностроение, 1978. - 191 с.).
Недостатком таких гиростабилизаторов является ограниченная точность. Она определяется величиной коэффициентов передачи усилителей, которые ограничены условиями устойчивости.
Наиболее близкими являются двухосные гиростабилизаторы, содержащие наружную рамку, установленную на основании с вращением относительно оси, перпендикулярной основанию, и расположенную в ней платформу, вращающуюся относительно оси, перпендикулярной оси вращения наружной рамки, установленные на осях вращения наружной рамки и платформы исполнительные двигатели, входы которых соединены через усилители с выходами установленного на платформе ГДУ, входы которого соединены с устройством управления, установленные на основании датчик угловой скорости (ДУС) и датчик углового ускорения (ДУУ), оси чувствительности которых параллельны оси вращения наружной рамки, выходы которых соединены через усилитель с входами исполнительного двигателя канала наружной рамки, установленные на наружной рамке ДУС и ДУУ, оси чувствительности которых параллельны оси вращения платформы, выходы которых соединены через усилитель с исполнительным двигателем канала платформы (Фабрикант Е.А. , Журавлев П.Д. Динамика следящего привода гироскопических стабилизаторов. - М.: Машиностроение, 1984. - 265 с.).
Недостатком является низкая эффективность примененной схемы компенсации, поскольку в двухосных гиростабилизаторах имеются дополнительные возмущающие моменты от вязкого трения и инерционных сил, обусловленные наличием дополнительной рамки подвеса и действием трехкомпонентной качки (см., например, Пельпор Д. С. , Колосов Ю.А., Рахтеенко Е.Р. Расчет и проектирование гироскопических стабилизаторов. - М.: Машиностроение, 1972. - 325 с.). При работе в режиме управления также возникают дополнительные возмущающие моменты, обусловленные угловыми скоростями управления. Вклад этих дополнительных составляющих в суммарный возмущающий момент может достигать 80%.
Задачей изобретения является повышение точности двухосного управляемого гиростабилизатора за счет полной компенсации возмущающих моментов, возникающих в такой системе при трехкомпонентной качке основания и наличии угловых скоростей управления.
Задача решается тем, что в известном способе повышения точности гироскопического стабилизатора определяют абсолютную угловую скорость и угловое ускорение движения основания относительно оси, параллельной оси вращения наружной рамки, определяют абсолютную угловую скорость и угловое ускорение движения наружной рамки относительно оси, параллельной оси вращения платформы, определяют компенсирующий сигнал для канала наружной рамки и платформы, подают компенсирующие сигналы на исполнительные двигатели каналов наружной рамки и платформы; дополнительно определяют абсолютную угловую скорость и угловое ускорение движения наружной рамки относительно оси, перпендикулярной осям вращения наружной рамки и платформы, определяют угловую скорость и угловое ускорение управления по оси наружной рамки и определяют угол поворота платформы относительно наружной рамки, определяют компенсирующий сигнал для канала наружной рамки по формуле
определяют компенсирующий сигнал для канала платформы по формуле
где  - абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси, перпендикулярной осям вращения наружной рамки и платформы,
- абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси, перпендикулярной осям вращения наружной рамки и платформы, - абсолютная угловая скорость и угловое ускорение основания относительно оси вращения наружной рамки,
- абсолютная угловая скорость и угловое ускорение основания относительно оси вращения наружной рамки, - абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси вращения платформы,
- абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси вращения платформы, - угловая скорость и угловое ускорение управления по оси наружной рамки, формируемые устройством управления,
- угловая скорость и угловое ускорение управления по оси наружной рамки, формируемые устройством управления,
ϕz - угол поворота платформы относительно наружной рамки,
b1, b2 - коэффициенты, равные коэффициентам вязкого трения в осях вращения наружной рамки и платформы,
Тд1, Тд2 - коэффициенты, равные постоянным времени исполнительных двигателей каналов наружной рамки и платформы,
Jx1, Jy1, Jz1, Jx2, Jy2 - коэффициенты, равные главным центральным моментам инерции наружной рамки и платформы.
Данный способ реализуется тем, что в известном двухосном управляемом гиростабилизаторе, содержащем наружную рамку, установленную на основании с вращением относительно оси, перпендикулярной основанию, и расположенную в ней платформу, вращающуюся относительно оси, перпендикулярной оси вращения наружной рамки, установленные на осях вращения наружной рамки и платформы исполнительные двигатели, входы которых соединены через усилители с выходами установленного на платформе ГДУ, входы которого соединены с устройством управления, установленные на основании ДУС и ДУУ, оси чувствительности которых параллельны оси вращения наружной рамки, установленные на наружной рамке ДУС и ДУУ, оси чувствительности которых параллельны оси вращения платформы, на наружной рамке дополнительно установлены ДУС и ДУУ, оси чувствительности которых перпендикулярны осям вращения наружной рамки и платформы, а на оси вращения платформы дополнительно установлен датчик угла, измеряющий угол поворота платформы относительно наружной рамки, входы усилителей исполнительных двигателей каналов наружной рамки и платформы дополнительно соединены с выходами вычислителей компенсирующих сигналов каналов наружной рамки и платформы, входы вычислителя компенсирующего сигнала канала наружной рамки соединены с выходами всех ДУС и ДУУ, выходами датчика угла и выходами устройства управления по оси наружной рамки по угловой скорости и угловому ускорению управления, а входы вычислителя компенсирующего сигнала канала платформы соединены с выходами установленных на наружной рамке ДУС и ДУУ, выходами датчика угла и выходами устройства управления по оси наружной рамки по угловой скорости и угловому ускорению управления.
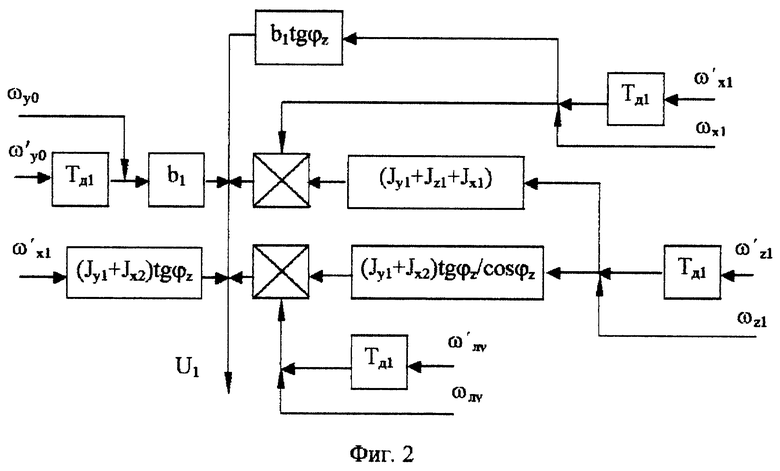
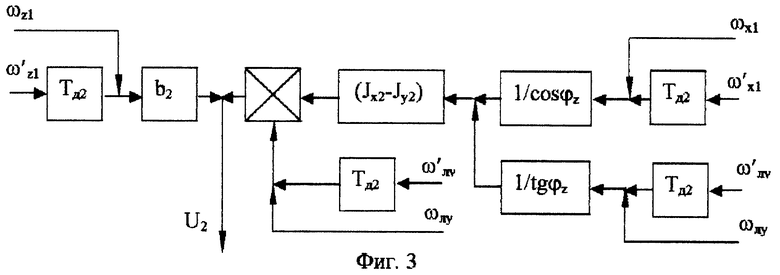
На фиг. 1 изображена принципиальная схема двухосного управляемого гиростабилизатора. На фиг.2 и 3 изображены принципиальные схемы вычислителей компенсирующих сигналов каналов наружной рамки и платформы.
Гиростабилизатор содержит наружную рамку 1, установленную на основании с вращением относительно оси, перпендикулярной основанию, и расположенную в ней платформу 2, вращающуюся относительно оси, перпендикулярной оси вращения наружной рамки, установленные на осях вращения наружной рамки и платформы исполнительные двигатели 3 и 4, входы которых соединены через усилители 5 и 6 с выходами установленного на платформе 2 ГДУ 7, входы которого соединены с выходами устройства управления 8, ДУС 9 и ДУУ 10, установленные на основании так, что их оси чувствительности параллельны оси вращения наружной рамки 1, ДУС 11 и ДУУ 12, установленные на наружной рамке 1 так, что их оси чувствительности параллельны оси вращения платформы 2, ДУС 13 и ДУУ 14, установленные на наружной рамке 1 так, что их оси чувствительности перпендикулярны осям чувствительности ДУС 9, 11 и ДУУ 10, 12, датчик угла 15, установленный на оси вращения платформы 2, вычислитель 16 компенсирующего сигнала канала наружной рамки, входы которого соединены с выходами ДУС 9, 11,13, ДУУ 10, 12, 14, датчика угла 15 и выходами устройства управления 8 по оси наружной рамки по угловой скорости и угловому ускорению управления, а выход соединен с входом исполнительного двигателя 3 через усилитель 5, вычислитель 17 компенсирующего сигнала канала платформы, входы которого соединены с выходами ДУС 11, 13, ДУУ 12, 14, датчика угла 15 и выходами устройства управления 8 по оси наружной рамки по угловой скорости и угловому ускорению управления, а выход соединен с входом исполнительного двигателя 4 через усилитель 6.
Устройство работает следующим образом. При наличии качки основания платформа 2 стремится сохранить свое положение в пространстве (в режиме стабилизации) или отследить задаваемое устройством управления 8 направление (в режиме управления) благодаря обратной связи с ГДУ 7 через усилители 5 и 6 на исполнительные двигатели 3 и 4. В то же время основание и наружная рамка 1 совершают пространственное движение относительно платформы 2, что приводит к возникновению возмущающих моментов от вязкого трения и инерционных сил. Величина данных моментов определяется известными постоянными параметрами - коэффициентами вязкого трения в осях вращения и моментами инерции наружной рамки и платформы и переменными параметрами, измеряемыми ДУС 9, 11, 13 и датчиком угла 15, а также угловой скоростью управления ωлу, формируемой устройством управления 8. Используя эти сигналы, вычислитель 16 компенсирующего сигнала канала наружной рамки (17 канала платформы) формирует сигнал U1(U2), равный возмущающему моменту, приложенному к наружной рамке 1 (платформе 2). Этот сигнал подается через усилитель 5 (6) на исполнительный двигатель 3 (4), который развивает момент, компенсирующий возмущение, приложенное к наружной рамке 1 (платформе 2). Чтобы исключить отставание компенсирующего момента по отношению к возмущающему из-за инерционности исполнительного двигателя, в состав сигнала U1(U2) входит составляющая, пропорциональная производной возмущающего момента с коэффициентом пропорциональности, равным постоянной времени исполнительного двигателя, формируемая по сигналам с ДУУ 10, 12, 14 и устройства управления 8-
Использование данной схемы компенсации позволяет дополнительно повысить точность в несколько раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2005 |
|
RU2293949C1 |
| Двухосный индикаторный гиростабилизатор | 2021 |
|
RU2767715C1 |
| Двухосный индикаторный гиростабилизатор | 2022 |
|
RU2793844C1 |
| Двухосный индикаторный гиростабилизатор | 2021 |
|
RU2764744C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2004 |
|
RU2260773C1 |
| ДВУХОСНЫЙ ИНДИКАТОРНЫЙ ГИРОСТАБИЛИЗАТОР | 2022 |
|
RU2801138C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ДВУХОСНЫЙ ГИРОСТАБИЛИЗАТОР | 1984 |
|
SU1839933A1 |
| Индикаторный гиростабилизатор | 2021 |
|
RU2790028C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
Гиростабилизатор предназначен для использования на подвижных объектах для стабилизации и управления линией визирования. Технический результат: повышение точности за счет полной компенсации возмущающих моментов, возникающих в системе при трехкомпонентной качке основания и наличии угловых скоростей управления. Определяют абсолютную угловую скорость и угловое ускорение движения основания относительно оси, параллельной оси вращения наружной рамки. Определяют абсолютную угловую скорость и угловое ускорение движения наружной рамки относительно оси, параллельной оси вращения платформы. Определяют компенсирующий сигнал для канала наружной рамки и платформы. Подают компенсирующие сигналы на исполнительные двигатели. Определяют абсолютную угловую скорость и угловое ускорение движения наружной рамки относительно оси, перпендикулярной осям вращения наружной рамки и платформы. Определяют угловую скорость и угловое ускорение управления по оси наружной рамки и определяют угол поворота платформы относительно наружной рамки. Компенсирующие сигналы для канала наружной рамки и для канала платформы определяют по математическим выражениям, приведенным в описании. На наружной рамке гиростабилизатора дополнительно установлены датчик угловой скорости и датчик углового ускорения, оси чувствительности которых перпендикулярны осям вращения наружной рамки и платформы, а на оси вращения платформы установлен датчик угла, измеряющий угол поворота платформы относительно наружной рамки. 2 с.п. ф-лы, 3 ил.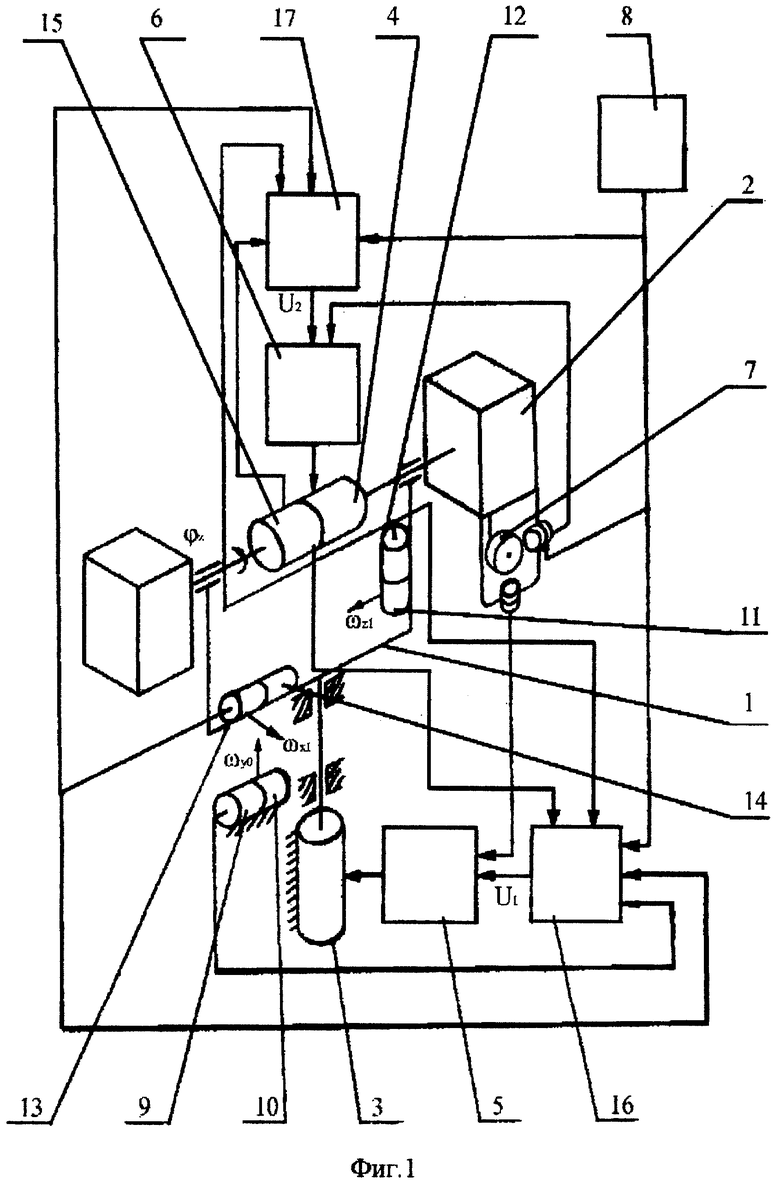

определяют компенсирующий сигнал для канала платформы по формуле
где  - абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси, перпендикулярной осям вращения наружной рамки и платформы,
- абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси, перпендикулярной осям вращения наружной рамки и платформы, - абсолютная угловая скорость и угловое ускорение основания относительно оси вращения наружной рамки;
- абсолютная угловая скорость и угловое ускорение основания относительно оси вращения наружной рамки; - абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси вращения платформы;
- абсолютная угловая скорость и угловое ускорение наружной рамки относительно оси вращения платформы; - угловая скорость и угловое ускорение управления по оси наружной рамки, формируемые устройством управления;
- угловая скорость и угловое ускорение управления по оси наружной рамки, формируемые устройством управления;
ϕz - угол поворота платформы относительно наружной рамки;
b1, b2 - коэффициенты, равные коэффициентам вязкого трения в осях вращения наружной рамки и платформы;
Tд1, Tд2 - коэффициенты, равные постоянным времени исполнительных двигателей каналов наружной рамки и платформы;
Jx1, Jy1, Jz1, Jx2, Jу2 - коэффициенты, равные главным центральным моментам инерции наружной рамки и платформы.
| БЕСЕКЕРСКИЙ В.А | |||
| и др | |||
| Динамический синтез систем гироскопической стабилизации | |||
| - Л.: Судостроение, 1968, с | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| ФАБРИКАНТ Е.А | |||
| и др | |||
| Динамика следящего привода гироскопических стабилизаторов | |||
| - М.: Машиностроение | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| САННЫЙ ВЕЛОСИПЕД С ВЕДУЩИМ КОЛЕСОМ, СНАБЖЕННЫМ ШИПАМИ | 1921 |
|
SU265A1 |
| СПОСОБ КОРРЕКЦИИ ГИРОКОМПАСА | 1999 |
|
RU2153152C1 |
| DE 3033280 A, 22.04.1982. | |||
