Изобретение относится к аэродинамическим схемам (АС) летательных аппаратов (ЛА) и может быть использовано при создании новых и модернизации существующих летательных аппаратов.
Известна крестокрылая аэродинамическая схема ЛА с поворотным крылом и подвижным оперением [1] , содержащая корпус, четыре консоли поворотного крыла, установленные с возможностью вращения относительно корпуса, и четыре консоли подвижного оперения, установленные с возможностью вращения относительно корпуса, причем консоли крыла и оперения установлены на корпусе в двух взаимно перпендикулярных плоскостях. Недостатком этой АС является большой вес крыла, что обусловлено большим количеством его консолей.
Известна также самолетная нормальная аэродинамическая схема летательного аппарата [2], содержащая корпус, две консоли крыла, установленные неподвижно на корпусе, киль, установленный неподвижно в хвостовой части корпуса в вертикальной плоскости связанной системы координат, стабилизатор, две консоли которого установлены неподвижно в хвостовой части корпуса в плоскости, перпендикулярной плоскости киля, руля направления, установленного на задней кромке киля с возможностью вращения относительно него и руля высоты, установленного на задних кромках консолей стабилизатора с возможностью вращения относительно него. Недостатком этой АС является возможность прекращения правильного функционирования некоторых систем ЛА в процессе создания достаточно большой по величине горизонтальной аэродинамической управляющей силы, необходимой для быстрого и значительного изменения направления движения ЛА в горизонтальной плоскости.
Прототипом заявляемого изобретения следует считать самолетную нормальную схему ЛА [2], общими признаками которого с заявляемым изобретением является то, что он содержит корпус, две консоли крыла, киль, установленный в хвостовой части корпуса в вертикальной плоскости связанной системы координат, и стабилизатор, две консоли которого установлены в хвостовой части корпуса в плоскости, перпендикулярной плоскости киля.
Кроме того, прототип содержит руль направления, установленный на задней кромке киля с возможностью вращения относительно него, и руль высоты, установленный на задних кромках консолей стабилизатора с возможностью вращения относительно него, а консоли крыла, киль и консоли стабилизатора установлены неподвижно на корпусе ЛА.
Недостатком прототипа является возможность прекращения правильного функционирования некоторых систем ЛА в процессе создания достаточно большой по величине горизонтальной аэродинамической управляющей силы, необходимой для быстрого и значительного изменения направления движения ЛА в горизонтальной плоскости. Чтобы убедиться в этом, рассмотрим, например, функционирование системы спутниковой навигации, предназначенной для определения местоположения ЛА и точного времени, антенна которой скреплена с корпусом ЛА и ее диаграмма направленности направлена в верхнюю полусферу. Для нормального функционирования этой системы в пределах диаграммы направленности ее антенны должны одновременно находится не менее четырех искусственных спутников Земли, от которых эта антенна принимает радиосигналы. Очевидно, что в результате перемещения диаграммы направленности антенны, которое вызвано поворотом корпуса ЛА вокруг продольной оси, необходимом в прототипе для создания достаточно большой по величине горизонтальной аэродинамической управляющей силы, которая вызывает быстрое и значительное изменение направления движения ЛА в горизонтальной плоскости, часть искусственных спутников Земли может найти из этой диаграммы направленности. В результате в пределах диаграммы направленности антенны может остаться менее четырех искусственных спутников Земли, что приведет к прекращению правильного функционирования системы спутниковой навигации ЛА.
Целью предлагаемого изобретения является устранение указанного недостатка прототипа, а именно исключение возможности прекращения правильного функционирования некоторых систем ЛА в процессе создания достаточно большой по величине горизонтальной аэродинамической управляющей силы, необходимой для быстрого и значительного изменения направления движения ЛА в горизонтальной плоскости.
Поставленная цель достигается следующим. Обе консоли крыла устанавливают на ободе с возможностью вращения относительно него и с возможностью дифференциального отклонения этих консолей, а обод устанавливают на корпусе ЛА с возможностью вращения относительно корпуса вокруг его продольной оси. Кроме того, киль устанавливают с возможностью вращения относительно корпуса ЛА и обе консоли стабилизатора также устанавливают с возможностью вращения относительно корпуса ЛА и с возможностью дифференциального отклонения этих консолей.
Существо изобретения поясняется чертежом, где обозначено: 1 - правая консоль крыла; 2 - левая консоль крыла; 3 - обод; 4 - корпус ЛА; 5 - киль; 6 - правая консоль стабилизатора; 7 - левая консоль стабилизатора.
Устроена эта аэродинамическая схема ЛА следующим образом. Правая 1 и левая 2 консоли крыла установлены на ободе 3 с возможностью их вращения относительно обода 3 и с возможностью дифференциального отклонения этих консолей, при котором каждую из них можно отклонять на угол, отличающийся от угла отклонения другой консоли. Обод 3 установлен на корпусе 4 ЛА с возможностью вращения относительно корпуса 4 вокруг его продольной оси. Киль 5 установлен в хвостовой части корпуса 4 в вертикальной плоскости связанной системы координат с возможностью вращения относительно корпуса 4. Консоли 6 и 7 стабилизатора установлены в хвостовой части корпуса 4 в плоскости, перпендикулярной плоскости киля, с возможностью вращения относительно корпуса 4 и с возможностью дифференциального отклонения этих консолей.
Работает предлагаемая аэродинамическая схема ЛА следующим образом. Допустим в качестве исходного состояния прямолинейный горизонтальный полет ЛА. Пусть в этом состоянии корпус ЛА находится в воздушном потоке под нулевыми углами атаки в вертикальной Акв и горизонтальной Акг плоскостях
Акв = 0, (1)
Акг = 0, (2)
ось вращения консолей 1 и 2 крыла относительно обода 3 расположена в горизонтальной плоскости связанной системы координат ЛА, угол F отклонения обода 3 относительно корпуса 4 равен 0
F = 0, (3)
угол 3 отклонения киля 5 относительно корпуса 4 также равен 0
S = 0, (4)
а одинаковые значения углов W1 и W2 отклонения соответственно консолей 1 и 2 крыла относительно корпуса 4
W1 = W2 (5)
и одинаковые значения углов R6 и R7 отклонения консолей 6 и 7 стабилизатора относительно корпуса 4
R6 = R7 (6)
являются такими, что момент Мкр подъемных сил Y1 и Y2, создаваемых соответственно консолями 1 и 2 крыла пропорционально углам W1 и W2 (5), относительно центра массы (ц.м.) ЛА в вертикальной плоскости равен по величине противоположно направленному моменту Мст подъемных сил Y6 и Y7, создаваемых консолями 6 и 7 стабилизатора пропорционально углам R6 и R7 (6), относительно ц.м. ЛА в этой же плоскости, а суммарная подъемная сила Y
Y = Y1 + Y2 + Y6 + Y7 (7)
равна силе G веса ЛА
Y = G (8)
Поэтому корпус 4 не вращается вокруг ц.м. в вертикальной плоскости и не изменяет значения угла атаки Акв (1) в этой плоскости, а ЛА продолжает горизонтальный полет. С учетом (3) и (4) корпус 4 ЛА не вращается также и в горизонтальной плоскости и не изменяет значения угла атаки Акг (2) в этой плоскости. Поэтому управляющая сила P, создаваемая ЛА в горизонтальной плоскости, равна 0 и ЛА совершает прямолинейный полет.
С учетом выражений (4), (5) и (6) значения моментов крена Мккр, Мкк и Мкст, создаваемых соответственно консолями 1 и 3 крыла, килем 5 и консолями 6 и 7 стабилизатора относительно продольной оси корпуса 4 ЛА, равны 0
Мккр = Мкк = Мкст = 0, (9)
и корпус 4 ЛА не вращается вокруг своей продольной оси, сохраняя нулевое значение угла крена Q
Q = 0, (10)
а обод 3 также не вращается и сохраняет нулевое значение угла F (3).
Пусть в некоторый момент времени T0 полета от системы управления ЛА поступает сигнал на изменение направления полета ЛА в горизонтальной плоскости влево, который пропорционален заданному значению угла
Fт = 0 (11)
поворота обода 3 относительно корпуса 4. По этому сигналу углы W1 и W2 отклонения консолей 1 и 2 крыла относительно обода 3 изменяются на величину dW, пропорциональную значению Fт, так что новые значения W11 и W21 этих углов равны
W11 = W1 + dW (12)
W21 = W2 - dW (13)
В результате подъемная сила Y1, создаваемая правой консолью 1 крыла пропорционально углу W11, возрастает, а подъемная сила Y21, создаваемая левой консолью 2 крыла пропорционально углу W21, уменьшается по сравнению с значениями этих сил в исходном состоянии ЛА. Под действием момента Мккр, который создается разностью сил Y1 и Y2 относительно продольной оси обода 3, совпадающей с продольной осью ЛА, обод 3 поворачивается до тех пор, пока угол F его отклонения станет равным углу Fт
F = Fт. (14)
При этом суммарная подъемная сила Yкр, создаваемая крылом,
Yкр = Y1 + Y2 (15)
раскладывается на две составляющие: аэродинамическую подъемную силу Yкрв, действующую в вертикальной плоскости,
Yкрв = Yкр•cos (F) (16)
и горизонтальную аэродинамическую управляющую силу Yкрг
Yкрг = Yкр•sin(F). (17)
Одновременно от системы управления ЛА поступает сигнал на отклонение киля 5 на угол Sт
Sт = 0 (18)
под действием которого киль 5 отклоняется на этот угол Sт
S = Sт, (19)
пропорционально которому киль 5 создает горизонтальную аэродинамическую управляющую силу Yкг, причем значение угла Sт задают из условия, чтобы момент Mкр силы Yкр относительно ц.м. ЛА был равен противоположно направленному моменту Мркр силы Yкрг относительно ц.м. ЛА. В результате этого значение угла Aкг (2) не изменится, а на ЛА будет действовать горизонтальная аэродинамическая управляющая сила
P = Yкрг + Yкг. (20)
Анализ выражений (5), (8), (12), (13), (15) и (16) позволяет сделать вывод, что при повороте обода 3 на угол Fт (11) и неизмененных значениях углов W1 и W2 равенство (8) нарушится, и будет иметь место
Yкрв < G
Поэтому одновременно с отклонением обода 3 на угол Fт и киля 5 на угол Sт консоли 1 и 2 крыла отклоняют на дополнительный угол dW1, при котором новое значение силы Yкрв, соответствующее углам отклонения
W12 = W + dW + dW1
W22 = W - dW + dW1
этих консолей, обеспечило бы равенство этой силы силе веса ЛА.
При появлении каких-либо случайных аэродинамических моментов Mксл, которые могут вызвать вращение корпуса ЛА вокруг его продольной оси, их действие парируется противоположно направленным моментом Мдст, который создается консолями 6 и 7 стабилизатора при их дифференциальном отклонении по соответствующему сигналу системы управления ЛА.
Таким образом, в заявляемой аэродинамичекой схеме в результате поворота обода вокруг продольной оси корпуса ЛА при создании достаточно большой горизонтальной аэродинамической управляющей силы не изменяется нулевой угол крена корпуса 4 ЛА, при котором обеспечивается нормальное функционирование всех систем ЛА. Этим достигается цель изобретения, так как исключается возможность прекращения правильного функционирования систем ЛА при создании достаточно большой горизонтальной аэродинамической управляющей силы, необходимой для быстрого и значительного изменения направления движения ЛА в горизонтальной плоскости.
Источники информации
1. В.Г. Григорьев, Д.В. Григорьев, "Аэродинамическая схема летательного аппарата", изобретение, патент РФ N 2093417, 1997 г.
2. М.Н. Шульженко, "Конструкция самолетов", - Москва, "Машиностроение", 1971 г., стр. 14.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1994 |
|
RU2090446C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ ПОВОРОТА УПРАВЛЯЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2193992C2 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148795C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯ ЗРЕНИЯ СИСТЕМЫ ОБЗОРА | 2000 |
|
RU2183023C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЙ ПАРАМЕТРОВ ТРАЕКТОРИИ БОМБЫ | 2002 |
|
RU2212620C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ОБЛАСТИ ВОЗМОЖНОГО ПУСКА РАКЕТЫ | 2001 |
|
RU2206044C2 |
| АВТОМОБИЛЬ | 1995 |
|
RU2104895C1 |
Изобретение относится к авиации. Летательный аппарат содержит корпус, две консоли крыла, киль и две консоли стабилизатора. Киль, консоли крыла и стабилизатора установлены с возможностью вращения вокруг соответствующих поперечных осей связанной системы координат ЛА. Дополнительно введен обод, который установлен на корпусе с возможностью вращения вокруг продольной оси связанной системы координат ЛА и в котором установлены оси консолей крыла. Предложенное изобретение обеспечивает нормальное функционирование всех систем ЛА при создании достаточно большой горизонтальной аэродинамической силы. 1 ил.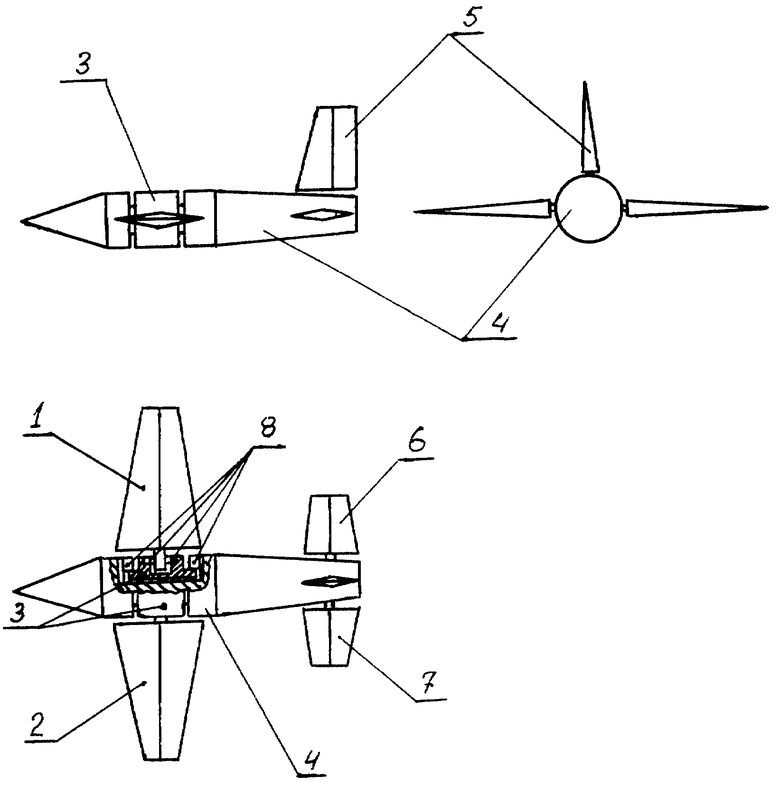
Аэродинамическая схема летательного аппарата, которая содержит корпус, две консоли крыла, киль и две консоли стабилизатора, причем киль, консоли крыла и стабилизатора установлены с возможностью их вращения вокруг соответствующих поперечных осей связанной системы координат ЛА, отличающаяся тем, что дополнительно введен обод, который установлен на корпусе с возможностью вращения вокруг продольной оси связанной системы координат ЛА и в котором установлены оси консолей крыла.
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |
| 1966 |
|
SU415566A1 | |
| US 4998689 A, 12.03.1991. | |||
