Изобретение относится к способам поворота управляющих аэродинамических поверхностей (УАП) летательных аппаратов (ЛА) и может быть использовано при создании новых и модернизации существующих приводов поворота УАП ЛА.
Известен способ поворота УАП ЛА [1], который состоит в том, что предварительно УАП устанавливают на корпусе ЛА с возможностью вращения, внутри корпуса ЛА устанавливают рулевую машину (РМ), вычислительное устройство (ВУ) и усилитель (У), выходной вал РМ механически соединяют с осью УАП внутри корпуса ЛА, при повороте УАП подают на ВУ электрический сигнал Uтр, пропорциональный требуемому значению Fтр угла поворота УАП, измеряют текущее значение Fт угла поворота УАП, формируют электрический сигнал Uт, пропорциональный значению Fт, вычисляют разность dU сигналов Uтр и Uт, усиливают сигнал dU и подают на РМ этот усиленный сигнал, в соответствии с которым перемещают выходной вал РМ до достижения равенства сигнала Uт сигналу Uтр. Недостатком этого способа является большая мощность РМ, потребная для быстрого поворота УАП, имеющей большую площадь и значительный шарнирный момент.
Известен также способ поворота УАП ЛА [2], который состоит в том, что предварительно УАП устанавливают на корпусе ЛА с возможностью вращения, на задней кромке УАП устанавливают дополнительную управляющую аэродинамическую поверхность (ДУАП) с возможностью вращения, внутри корпуса ЛА устанавливают рулевую машину (РМ), вычислительное устройство (ВУ) и усилитель (У), выходной вал РМ механически соединяют с осью ДУАП, причем это механическое соединение прокладывают через ось УАП и внутри профиля УАП, в процессе полета ЛА при повороте УАП подают на ВУ электрический сигнал Uтр, пропорциональный требуемому значению Fтр угла поворота УАП, измеряют текущие значения угла Fт, угловой скорости  и углового ускорения
и углового ускорения  вращения УАП, формируют электрические сигналы Uт,
вращения УАП, формируют электрические сигналы Uт,  и
и  пропорциональные соответственно измеренным значениям Fт,
пропорциональные соответственно измеренным значениям Fт,  и
и  с соответствующими значениями коэффициентов пропорциональности, вычисляют сумму сигналов Uт,
с соответствующими значениями коэффициентов пропорциональности, вычисляют сумму сигналов Uт,  и
и  и разность dU сигналов Uтр и Uc, усиливают сигнал dU и подают на РМ этот усиленный сигнал, в соответствии с которым перемещают выходной вал РМ до достижения равенства сигналов Uc и Uтр после окончания переходного процесса, вследствие чего изменяют значение Fд угла поворота ДУАП и значение Yд аэродинамической управляющей силы, создаваемой ДУАП, под действием Мд момента силы Yд относительно оси вращения УАП изменяют значение Fт и значение Yр аэродинамической управляющей силы, создаваемой УАП, до достижения равенства значений Мшр шарнирного момента УАП и момента Мд после окончания переходного процесса. Недостатком этого способа является значительное аэродинамическое сопротивление УАП вследствие большой толщины профиля УАП, обусловленной тем, что механическое соединение выходного вала РМ с ДУАП прокладывают через ось УАП и внутри профиля УАП.
и разность dU сигналов Uтр и Uc, усиливают сигнал dU и подают на РМ этот усиленный сигнал, в соответствии с которым перемещают выходной вал РМ до достижения равенства сигналов Uc и Uтр после окончания переходного процесса, вследствие чего изменяют значение Fд угла поворота ДУАП и значение Yд аэродинамической управляющей силы, создаваемой ДУАП, под действием Мд момента силы Yд относительно оси вращения УАП изменяют значение Fт и значение Yр аэродинамической управляющей силы, создаваемой УАП, до достижения равенства значений Мшр шарнирного момента УАП и момента Мд после окончания переходного процесса. Недостатком этого способа является значительное аэродинамическое сопротивление УАП вследствие большой толщины профиля УАП, обусловленной тем, что механическое соединение выходного вала РМ с ДУАП прокладывают через ось УАП и внутри профиля УАП.
Прототипом заявляемого изобретения следует считать способ поворота УАП ЛА [2], общие признаки которого с заявляемым изобретением состоят в том, что предварительно УАП устанавливают на корпусе ЛА с возможностью вращения, на задней кромке УАП устанавливают дополнительную управляющую аэродинамическую поверхность (ДУАП) с возможностью вращения, внутри корпуса ЛА устанавливают рулевую машину (РМ), вычислительное устройство (ВУ) и усилитель, в процессе полета ЛА при повороте УАП подают на ВУ электрический сигнал Uтр, пропорциональный требуемому значению Fтр угла поворота УAП, измеряют текущие значения угловой скорости  и углового ускорения
и углового ускорения  вращения УАП, формируют электрические сигналы
вращения УАП, формируют электрические сигналы  и
и  пропорциональные соответственно измеренным значениям
пропорциональные соответственно измеренным значениям  и
и  с соответствующими значениями коэффициентов пропорциональности, вычисляют сумму Uc1 сигналов
с соответствующими значениями коэффициентов пропорциональности, вычисляют сумму Uc1 сигналов  и
и  вычисляют разность dU сигналов Uтр и Uc, усиливают сигнал dU и подают на РМ этот усиленный сигнал, в соответствии с которым перемещают выходной вал РМ, вследствие чего изменяют значение Fд угла поворота ДУАП и значение Yд аэродинамической управляющей силы, создаваемой ДУАП, под действием Мд момента силы Yд относительно оси вращения УАП и шарнирного момента Мшр УАП изменяют значение Fт и значение Yр аэродинамической управляющей силы, создаваемой УАП, до достижения равенства значений Мшр и Мд после окончания переходного процесса.
вычисляют разность dU сигналов Uтр и Uc, усиливают сигнал dU и подают на РМ этот усиленный сигнал, в соответствии с которым перемещают выходной вал РМ, вследствие чего изменяют значение Fд угла поворота ДУАП и значение Yд аэродинамической управляющей силы, создаваемой ДУАП, под действием Мд момента силы Yд относительно оси вращения УАП и шарнирного момента Мшр УАП изменяют значение Fт и значение Yр аэродинамической управляющей силы, создаваемой УАП, до достижения равенства значений Мшр и Мд после окончания переходного процесса.
Кроме того, в прототипе предварительно механически соединяют выходной вал РМ с ДУАП, причем это соединение прокладывают через ось УАП и внутри профиля УАП, а в процессе полета ЛА при повороте УАП измеряют текущее значение Fт угла поворота УАП, формируют электрический сигнал Uт, пропорциональный измеренному значению Fт с соответствующим значением коэффициента пропорциональности, вычисляют сигнал Uc, являющийся суммой сигналов Uc1 и Uт, и перемещают выходной вал РМ до достижения равенства сигналов Uc и Uтр после окончания переходного процесса.
Недостатком прототипа является значительное аэродинамическое сопротивление УАП вследствие большой толщины профиля УАП, обусловленной тем, что механическое соединение выходного вала РМ с ДУАП прокладывают через ось УАП и внутри профиля УАП. Очевидно, что для размещения внутри оси УАП и профиля УАП тех устройств, которые входят в состав механического соединения выходного вала РМ с ДУAП, профиль УАП должен иметь достаточно большую толщину С. Известно (Н. Ф. Краснов, В. Н. Кошевой, Д. Н. Данилов, В.Ф. Захарченко, "Аэродинамика ракет", М. , издательство "Высшая школа", 1968 г., стр.222-223), что коэффициент Схпр профильного сопротивления, являющийся составной частью коэффициента Сх лобового аэродинамического сопротивления аэродинамической поверхности на докритических скоростях (М<Мкр), определяется формулой
где 2Cxf - коэффициент трения плоской пластины с длиной, равной средней хорде В УАП; М - число Маха полета ЛА;  - относительная толщина профиля УАП, определяемая формулой
- относительная толщина профиля УАП, определяемая формулой
а коэффициент Схв волнового сопротивления, являющийся составной частью Сх на сверхкритических скоростях (М>Мкр), определяется формулой
где х=(М-Мкр)/(1-Мкр).
Анализ формул (1)...(3) показывает, что с увеличением толщины С профиля УАП величина Схпр и Схв возрастает. Следовательно, при всех скоростях полета ЛА сила лобового сопротивления УАП тем больше, чем больше толщина С профиля УАП.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно, уменьшение аэродинамического сопротивления УАП, на которой установлена ДУАП.
Для достижения этой цели предварительно на корпусе ЛА позади оси вращения УАП устанавливают дополнительный вал с возможностью вращения, ось вращения которого параллельна оси вращения УАП. Один конец этого вала внутри корпуса ЛА механически соединяют с выходным валом РМ, а на другом конце этого вала вне корпуса ЛА закрепляют вилку, в прорезь которой на скользящей посадке вводят цилиндрический выступ, закрепленный на одном конце рычага, другой конец которого закреплен на оси ДУАП. Также предварительно в ВУ вводят значения площадей УАП и ДУАП, расстояния между осями вращения УАП и ДУАП, расстояния между осями вращения УАП и дополнительного вала, длины рычага и отношения производных по углу атаки коэффициентов подъемной силы УАП и ДУAП. В процессе полета ЛА при повороте УАП вычисляют значение Fтр и значение Fвт угла поворота дополнительного вала, соответствующее значению Fтр, формируют электрический сигнал Uвт, пропорциональный значению Fвт с соответствующим значением коэффициента пропорциональности, измеряют текущее значение Fв угла поворота дополнительного вала, формируют электрический сигнал Uв, пропорциональный значению Fв с соответствующим значением коэффициента пропорциональности, вычисляют сумму Uc сигналов Uв и Uc1 и перемещают выходной вал РМ до достижения равенства сигналов Uc и Uвт после окончания переходного процесса.
Таким образом, в заявляемом способе механическая связь между выходным валом РМ и ДУАП осуществляется через дополнительный вал с закрепленной на нем вилкой и рычаг, закрепленный на оси ДУАП, и не проходит через ось УАП и внутри профиля УАП. Это позволяет делать профиль УАП значительно тоньше, чем в прототипе, в результате чего уменьшается аэродинамическое сопротивление УАП по сравнению с прототипом.
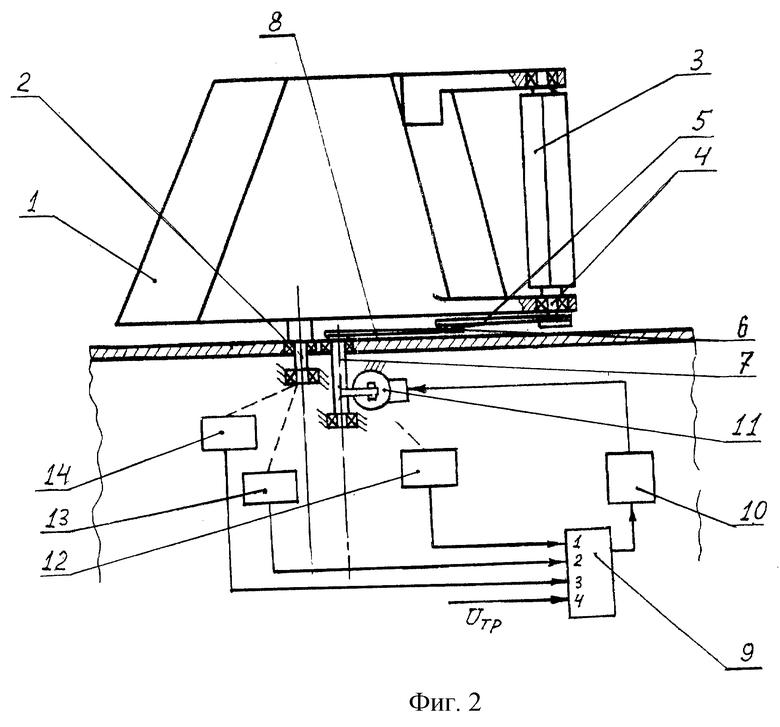
Существо заявляемого изобретения поясняется фигурами на чертежах. На фиг. 1 изображена кинематическая схема механических связей между УАП, ДУАП и дополнительного вала. На фиг. 2 изображена принципиальная конструктивная схема привода поворота УАП, реализующего предложенный способ.
На фиг. 1 обозначено: 1 - УАП; 2 - ДУАП; 3 - дополнительный вал; 4 - вилка; 5 - рычаг; 6 - выступ рычага 5; ОхОх - линия на корпусе ЛА, параллельная продольной оси ЛА; Ор - положение оси вращения УАП 1 на корпусе ЛА; Ов - положение оси вращения дополнительного вала 3 на корпусе ЛА; Од - положение оси вращения ДУАП 2; В - положение оси выступа 6; ОрОд - прямая линия, проходящая через оси вращения УАП 1 и ДУАП 2; ОвВ - прямая линия, проходящая через ось вращения дополнительного вала 3 и ось выступа 6; А - точка пересечения прямой ОрОд с прямой ОвВ; Lpв - расстояние между осями вращения УАП 1 и дополнительного вала 3; Lp - расстояние между осями вращения УАП 1 и ДУАП 2; Lд - расстояние между осью вращения ДУАП 2 и осью выступа 6, т.е. длина рычага 5; Fт - текущее значение угла отклонения УАП 1 от ее нейтрального положения; Fв - текущее значение угла отклонения дополнительного вала 3 от его нейтрального положения; Fд - текущее значение угла отклонения ДУАП 2 от ее нейтрального положения при нейтральном положении УАП 1;  - вектор скорости ЛА;
- вектор скорости ЛА;  - аэродинамическая управляющая сила, создаваемая ДУАП 2 при угле атаки Fд;
- аэродинамическая управляющая сила, создаваемая ДУАП 2 при угле атаки Fд;  - аэродинамическая управляющая сила, создаваемая УAП 1 при угле атаки Fт; Lрш - расстояние от оси Ор до точки приложения силы Yp.
- аэродинамическая управляющая сила, создаваемая УAП 1 при угле атаки Fт; Lрш - расстояние от оси Ор до точки приложения силы Yp.
На фиг.2 обозначено: 1 - управляющая аэродинамическая поверхность (УАП); 2 - ось УАП 1; 3 - дополнительная управляющая аэродинамическая поверхность (ДУАП); 4 - ось ДУАП 3; 5 - рычаг; 6 - выступ рычага 5; 7 - дополнительный вал (ДП); 8 - вилка; 9 - вычислительное устройство (ВУ); 1О - усилитель (У); 11 - рулевая машина (РМ); 12 - датчик угла (ДУ) поворота ДП 7; 13 - датчик угловой скорости (ДУС) вращения УАП 1; 14 - датчик углового ускорения (ДУУ) вращения УАП 1; Uтр - входной электрический сигнал, пропорциональный требуемому значению Fтр угла поворота УАП 1.
Существо предлагаемого способа состоит в следующем. Предварительно на корпусе ЛА устанавливают УАП 1 (фиг.1) с возможностью вращения, на задней кромке УАП 1 на расстоянии Lp от оси Ор вращения УАП 1 устанавливают ДУАП 2 с возможностью вращения, на корпусе ЛА позади оси Ор вращения УАП 1 на расстоянии Lpв от этой оси устанавливают дополнительный вал 3 с возможностью вращения, на одном конце которого вне корпуса ЛА закрепляют вилку 4, а другой конец вала 3 внутри корпуса ЛА механически соединяют с выходным валом рулевой машины, на оси ДУАП 2 закрепляют рычаг 5, на конце которого на расстоянии Lд от оси Од вращения ДУАП 2 закрепляют выступ 6, который на скользящей посадке вводят в прорезь вилки 4. Кроме того, предварительно в ВУ вводят значения Lp, Lpв, Lд, Lрш, значения площадей Sp УАП 1 и Sд ДУАП 2, а также величину отношения производных  и
и  по углу атаки коэффициентов Сур и Суд подъемной силы соответственно УАП 1 и ДУАП 2.
по углу атаки коэффициентов Сур и Суд подъемной силы соответственно УАП 1 и ДУАП 2.
При повороте УАП подают на ВУ электрический сигнал Uтр, пропорциональный требуемому значению Fтр угла поворота УАП 1
Unp=Кт•Fтр, (1)
где Кт - коэффициент пропорциональности, и вычисляют требуемое значение Fвт угла поворота дополнительного вала 3, соответствующее значению Fтр. Значение Fвт определяют в результате решения методом последовательных приближений следующего трансцендентного уравнения
где
которое получено в результате анализа треугольников АВОд и ОрОдВ (фиг.1) с использованием теоремы синусов и с учетом того, что после окончания переходного процесса отклонения УАП 1 на угол Fт выполняется соотношение
В ВУ формируют электрический сигнал Uвт, пропорциональный вычисленному значению Fвт (2)
Uвт=Kв•Fвт, (5)
где Kв - коэффициент пропорциональности.
С помощью соответствующих датчиков измеряют текущие значения угла поворота Fв дополнительного вала 3, угловой скорости  и углового ускорения
и углового ускорения  вращения УАП и формируют электрические сигналы Uв, Uуc и Uуу, пропорциональные соответственно измеренным значениям Fв,
вращения УАП и формируют электрические сигналы Uв, Uуc и Uуу, пропорциональные соответственно измеренным значениям Fв, 
Uв=Кв•Fв, (6)

где Кус, Куу - соответствующие коэффициенты пропорциональности.
Эти сигналы подают на соответствующие входы ВУ, где вычисляют сумму Uc этих сигналов, которая с учетом (6)-(8) равна
Затем в ВУ вычисляют разность dU сигналов Uвт и Uc, которая с учетом выражений (5) и (9) равна
где
dFв=Fвт-Fв. (11)
Полученный сигнал dU усиливают и подают на РМ. В результате выходной вал РМ начинает перемещаться, поворачивая вал 3 с вилкой 4 и изменяя значение угла Fв в сторону уменьшения разности dFв. При этом через выступ 5, находящийся в прорези вилки 4, поворачивается рычаг 6 и скрепленная с ним ДУАП 2. В результате изменяется значение Fд угла поворота ДУАП 2, являющегося углом атаки ДУАП 2 в воздушном потоке. Поэтому изменяется значение создаваемой ДУАП 2 аэродинамической управляющей силы Yд
где q - скоростной напор. Момент силы Yд относительно оси Од вращения ДУАП 2 уравновешивается моментом сил реакции выступа 6 в вилке 4. Поэтому сила Yд относительно оси Ор вращения УАП 1 приложена в точке Од и при изменении ее значения изменяется значение создаваемого ею момента Mд относительно этой оси
Мд=Yд•Lp. (13)
Под действием этого момента изменяется значение Fт угла поворота УАП 1, являющегося углом атаки УАП 1 в воздушном потоке. В результате этого изменяется значение создаваемой УАП 1 аэродинамической управляющей силы Yр
Так как знак угла атаки Fт противоположен знаку угла атаки Fд, то сила Yp направлена противоположно направлению силы Yд и момент Мшр
Мшр=Yp•Lрш (15)
силы Yд относительно оси Ор вращения УАП 1 направлен противоположно направлению момента Мд. Поэтому поворот УДП 1 закончится тогда, когда после окончания переходного процесса наступит равенство моментов Мшр и Mд
Мшр=Мд. (16)
При достижении равенства
Fв=Fвт, (17)
после окончания переходного процесса поворота УАП 1 значения  и
и  становятся равными нулю и сигнал dU (10) также становится равным нулю, вследствие чего прекращается перемещение выходного вала РМ и изменение значений углов Fв, Fд и Fт. При этом вал 3 повернется на требуемый угол Fвт (2). Так как значение Fвт (2) определено при условии поворота УАП 1 на угол Fтр, то значение угла Fт, обеспечивающее выполнение равенства (17), из которого следует выражение (3) для Ка, равно требуемому значению Fтр угла поворота УАП 1.
становятся равными нулю и сигнал dU (10) также становится равным нулю, вследствие чего прекращается перемещение выходного вала РМ и изменение значений углов Fв, Fд и Fт. При этом вал 3 повернется на требуемый угол Fвт (2). Так как значение Fвт (2) определено при условии поворота УАП 1 на угол Fтр, то значение угла Fт, обеспечивающее выполнение равенства (17), из которого следует выражение (3) для Ка, равно требуемому значению Fтр угла поворота УАП 1.
Таким образом, предложенный способ позволяет повернуть управляющую аэродинамическую поверхность на требуемый угол Fтр без прокладки механической связи между рулевой машиной и дополнительной управляющей аэродинамической поверхностью через ось и профиль управляющей аэродинамической поверхности. Это позволяет по сравнению с прототипом существенно уменьшить толщину профиля и аэродинамическое сопротивление управляющей аэродинамической поверхности, чем и достигается цель изобретения.
Устройство, реализующее предлагаемый способ, содержит (фиг.2) УАП 1 с осью 2, ДУАП 3 с осью 4, рычаг 5 с выступом 6, ДП 7 с вилкой 8, ВУ 9, У 10, РМ 11, ДУ 12, ДУС 13 и ДУУ 14, причем УАП 1 установлена на корпусе ЛА с возможностью вращения и ось 2 входит внутрь корпуса ЛА, ДУАП 3 установлена на задней кромке УАП 1 с возможностью вращения и на оси 4 ДУАП 2 укреплен рычаг 5, ДП 7 установлен на корпусе ЛА с возможностью вращения, вне корпуса ЛА на конце ДП 7 укреплена вилка 8, в прорезь которой на скользящей посадке введен выступ 6 рычага 5, ВУ 9, У 10, РМ 11, ДУ 12, ДУС 13 и ДУУ 14 установлены внутри корпуса ЛА, выходной вал РМ 11 механически связан с ДП 7 и ДУ 12, ось 2 УАП 1 механически связана с ДУС 13 и ДУУ 14, выход ДУ 12 электрически связан с первым входом ВУ 9, выход ДУС 13 электрически связан со вторым входом ВУ 9, выход ДУУ 14 электрически связан с третьим входом ВУ 9, выход ВУ 9 электрически связан с входом У 10, выход У 10 электрически связан с входом РМ 11, а четвертый вход ВУ 9 электрически связан с блоком системы управления ЛА, формирующим входной сигнал Uтp, пропорциональный требуемому значению Fтр угла поворота УАП 1.
Работает это устройство следующим образом. Пусть в исходном состоянии УАП 1, ДУАП 3 и ДП 7 неподвижны, вследствие чего
при нулевых значениях соответствующих углов
Fт=0, Fд=0, Fв=0. (19)
При подаче на четвертый вход входного сигнала Uтр (1) в ВУ 9 вычисляют значение
Fвт (2)
Fвт≠0, (20)
соответствующее принятому значению
Fтр≠0.
С учетом выражений (6)-(8), (18) и (19) на выходах ДУ 12, ДУС 13 и ДУУ 14 соответственно формируются сигналы
Uв=0, Uyc=0, Uуу=0, (21)
поступающие соответственно на первый, второй и третий входы ВУ 9, а в ВУ 9 формируется сигнал
Uвт≠0.
Поэтому с учетом (10), (11), (20) и (21) на выходе ВУ 9 действует сигнал
dU=Кв•Fвт≠0.
Этот сигнал, усиленный в У 10, поступает на вход РМ 11, вследствие чего начинает перемещаться выходной вал РМ 11 с соответствующей скоростью и поворачиваться ДП 7 с укрепленной на нем вилкой 8, причем значение угла поворота ДП 7 возрастает
Fв≠0. (22)
При повороте вилки 8 перемещается находящийся в ее прорези выступ 6 рычага 5, в результате чего поворачивается скрепленная с рычагом 5 ДУАП 3 на угол
Fд≠0,
и в соответствии с выражениями (12) и (13) создаются
Yд≠0, Мд≠0. (23)
Под действием момента Мд (23) начинает поворачиваться УАП 1. При этом возрастают значения углового ускорения  угловой скорости
угловой скорости  и угла поворота Fт УАП 1
и угла поворота Fт УАП 1
В результате на выходах ДУС 13 и ДУУ 14 формируются соответственно сигналы
Uyc≠0, Uyy≠0, (25)
поступающие соответственно на второй и третий входы ВУ 9 как сигналы гибких отрицательных обратных связей, и создаются сила Yp и момент Мшр, для которых с учетом (14), (15) и (24) справедливо
Yp≠0, Мшр≠0. (26)
Появление сигналов (22) и (25) приводит к уменьшению сигнала dU (10), что вызывает уменьшение скорости перемещения выходного вала РМ 11 и вращения ДП 7, а с учетом момента Мшр (26), противодействующего повороту УАП 1, замедляется скорость этого поворота. Поворот УАП 1 прекратится при тех значениях углов Fт и Fд, при которых после окончания переходного процесса выполняется равенство (16), а перемещение выходного вала РМ 11 и вращение ДП 7 прекратятся при достижения равенства (17) после окончания переходного процесса. При этом УАП 1 повернется на требуемый угол Fтр, а ДП 7 повернется на угол Fвт (2), соответствующий углу Fтр.
Источники информации
1. Костин С. В. , Петров Б.И., Гамынин Н.С., "Рулевые приводы", - М., "Машиностроение", 1973 г., стр. 10, 15, рис. 1.2, 1.5.
2. Григорьев В.Г., Григорьев Д.В., "Рулевой привод управляющей аэродинамической управляющей поверхности летательного аппарата". Авторское свидетельство N 1794804 от 8.10.1992 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1994 |
|
RU2090446C1 |
| Рулевой привод управляемой аэродинамической поверхности летательного аппарата | 1990 |
|
SU1794804A1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148533C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148795C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| АВТОМОБИЛЬ | 1995 |
|
RU2104895C1 |
| ПРИВОД УБОРКИ И ВЫПУСКА ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2085445C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
Изобретение относится к области средств управления для летательных аппаратов. Способ характеризуется использованием аэродинамической поверхности, дополнительной аэродинамической поверхности, установленных соответственно на оси вращения и дополнительном валу, рулевой машины, рычага с цилиндрическим выступом, вилки с прорезью для цилиндрического выступа, средств для измерения угла атаки и коэффициентов подъемной силы для каждой из поверхностей. Предусмотрено вычислительное устройство, позволяющее формировать сигнал управления поворотом дополнительной поверхности с учетом отношения производных по углу атаки коэффициентов подъемной силы каждой из поверхностей. Изобретение направлено на уменьшение аэродинамического сопротивления. 2 ил.
Способ поворота управляющей аэродинамической поверхности летательного аппарата, который состоит в том, что предварительно эту поверхность устанавливают на корпусе летательного аппарата с возможностью вращения, на задней кромке этой поверхности устанавливают дополнительную управляющую аэродинамическую поверхность с возможностью вращения, внутри корпуса летательного аппарата устанавливают рулевую машину, вычислительное устройство и усилитель, в процессе полета летательного аппарата для поворота управляющей аэродинамической поверхности подают на вычислительное устройство электрический сигнал Uтр, пропорциональный требуемому значению Fтр угла поворота этой поверхности, измеряют текущие значения угловой скорости  и углового ускорения
и углового ускорения  вращения этой поверхности, формируют электрические сигналы
вращения этой поверхности, формируют электрические сигналы  и
и  пропорциональные соответственно значениям
пропорциональные соответственно значениям  и
и  с соответствующими значениями коэффициентов пропорциональности, вычисляют сумму Uc1 сигналов
с соответствующими значениями коэффициентов пропорциональности, вычисляют сумму Uc1 сигналов  и
и  вычисляют разностный сигнал dU, усиливают этот сигнал dU и подают на рулевую машину этот усиленный сигнал, в соответствии с которым перемещают выходной вал рулевой машины, изменяют значение Fд угла поворота дополнительной управляющей аэродинамической поверхности и значение аэродинамической управляющей силы Yд, создаваемой этой поверхностью, под действием момента Мд силы Yд относительно оси вращения управляющей аэродинамической поверхности и шарнирного момента Мшр этой поверхности изменяют значение Fт и значение Yр аэродинамической управляющей силы, создаваемой этой поверхностью, до достижения равенства значений Мшр и Мд после окончания переходного процесса, отличающийся тем, что предварительно на корпусе летательного аппарата позади оси вращения управляющей аэродинамической поверхности устанавливают дополнительный вал с возможностью вращения, ось вращения которого параллельна оси вращения этой поверхности, один конец этого вала внутри корпуса летательного аппарата механически соединяют с выходным валом рулевой машины, на другом конце этого вала вне корпуса летательного аппарата закрепляют вилку, в прорезь которой на скользящей посадке вводят выступ, который закрепляют на одном конце рычага, другой конец которого закрепляют на оси этой дополнительной поверхности, также предварительно в вычислительное устройство вводят значения площадей этих поверхностей, расстояний между осями вращения этих поверхностей и между осями вращения управляющей аэродинамической поверхности и дополнительного вала, расстояния между фокусом и осью вращения этой поверхности, а также длины рычага и отношения производных по углу атаки коэффициентов подъемной силы этих поверхностей, в процессе полета летательного аппарата при повороте управляющей аэродинамической поверхности вычисляют значение Fтр и значение Fвт угла поворота дополнительного вала, соответствующее значение Fтр, формируют электрический сигнал Uвт, пропорциональный значению Fвт, измеряют текущее значение Fв угла поворота дополнительного вала, формируют электрический сигнал Uв, пропорциональный значению Fв, вычисляют сумму Uс сигналов Uв и Uc1 и сигнал dU как разность сигналов Uвт и Uс, и при перемещении выходного вала рулевой машины поворачивают дополнительный вал до достижения равенства сигналов Uс и Uвт после окончания переходного процесса.
вычисляют разностный сигнал dU, усиливают этот сигнал dU и подают на рулевую машину этот усиленный сигнал, в соответствии с которым перемещают выходной вал рулевой машины, изменяют значение Fд угла поворота дополнительной управляющей аэродинамической поверхности и значение аэродинамической управляющей силы Yд, создаваемой этой поверхностью, под действием момента Мд силы Yд относительно оси вращения управляющей аэродинамической поверхности и шарнирного момента Мшр этой поверхности изменяют значение Fт и значение Yр аэродинамической управляющей силы, создаваемой этой поверхностью, до достижения равенства значений Мшр и Мд после окончания переходного процесса, отличающийся тем, что предварительно на корпусе летательного аппарата позади оси вращения управляющей аэродинамической поверхности устанавливают дополнительный вал с возможностью вращения, ось вращения которого параллельна оси вращения этой поверхности, один конец этого вала внутри корпуса летательного аппарата механически соединяют с выходным валом рулевой машины, на другом конце этого вала вне корпуса летательного аппарата закрепляют вилку, в прорезь которой на скользящей посадке вводят выступ, который закрепляют на одном конце рычага, другой конец которого закрепляют на оси этой дополнительной поверхности, также предварительно в вычислительное устройство вводят значения площадей этих поверхностей, расстояний между осями вращения этих поверхностей и между осями вращения управляющей аэродинамической поверхности и дополнительного вала, расстояния между фокусом и осью вращения этой поверхности, а также длины рычага и отношения производных по углу атаки коэффициентов подъемной силы этих поверхностей, в процессе полета летательного аппарата при повороте управляющей аэродинамической поверхности вычисляют значение Fтр и значение Fвт угла поворота дополнительного вала, соответствующее значение Fтр, формируют электрический сигнал Uвт, пропорциональный значению Fвт, измеряют текущее значение Fв угла поворота дополнительного вала, формируют электрический сигнал Uв, пропорциональный значению Fв, вычисляют сумму Uс сигналов Uв и Uc1 и сигнал dU как разность сигналов Uвт и Uс, и при перемещении выходного вала рулевой машины поворачивают дополнительный вал до достижения равенства сигналов Uс и Uвт после окончания переходного процесса.
| Рулевой привод управляемой аэродинамической поверхности летательного аппарата | 1990 |
|
SU1794804A1 |
| US 4598890 А, 08.07.1986 | |||
| US 3589648 А, 29.06.1971 | |||
| Способ управления тиристорами импульсного усилителя мощности | 1979 |
|
SU864491A1 |

