Изобретение относится к способам определения местоположения летательного аппарата (ЛА) и может быть использовано при создании новых и модернизации существующих навигационных систем ЛА.
Известен способ определения местоположения ЛА [1], который состоит в том, что с ЛА посылают запросные сигналы, принимают их на двух наземных станциях, местоположение которых известно, излучают ответный сигнал с каждой из этих наземных станций, принимают на ЛА эти ответные сигналы наземных станций, измеряют на ЛА время запаздывания ответных сигналов относительно запросных сигналов, с использование этого времени запаздывания на ЛА вычисляют значения дальности между ЛА и каждой из этих двух наземных станций и с использованием этих значений дальности определяют местоположение ЛА относительно этих наземных станций. Недостатком этого способа является невозможность определения местоположения ЛА при выходе из строя наземных станций или одной из них.
Известен также способ определения местоположения ЛА [2], который состоит в том, что предварительно вводят в память вычислителя, установленного на ЛА, известные координаты местоположения заданного наземного объекта (НО), в полете ЛА визируют НО бортовым визиром ЛА, измеряют на ЛА дальность Д между ЛА и НО, курсовой угол q и угол места w НО и с использованием введенных координат НО и измеренных значений Д, q, w вычисляют координаты местоположения ЛА. Недостаток этого способа заключается в том, что его можно использовать только на тех ЛА, в состав бортового оборудования которых входит дальномер.
Прототипом заявляемого изобретения следует считать способ определения местоположения ЛА [2] , общим признаком которого с заявляемым изобретением является то, что в нем предварительно вводят в память вычислителя, установленного на ЛА, известные координаты местоположения заданного наземного объекта (НО), в полете ЛА визируют НО бортовым визиром ЛА и с использованием введенных координат НО и измеренных значений вычисляют координаты местоположения ЛА.
Кроме того, в прототипе измеряют дальность Д между ЛА и НО, курсовой угол q и угол места w НО.
Недостаток прототипа заключается в том, что его можно использовать только на тех ЛА, в состав бортового оборудования которых входит дальномер. Действительно, в прототипе необходимо измерять дальность Д между ЛА и НО. Для решения этой задачи на ЛА необходимо иметь в составе бортового оборудования ЛА радиолокационный или лазерный дальномер, в которых дальность определяют пропорционально измеряемому интервалу времени между моментом излучения с ЛА импульса электромагнитной энергии в направлении НО и моментом приема на ЛА импульса, отраженного от НО. Если же в составе бортового оборудования ЛА нет такого дальномера, то измерить дальность между ЛА и НО невозможно и нельзя использовать прототип для определения местоположения ЛА.
Целью заявляемого изобретения является устранение указанного недостатка прототипа, а именно определение местоположения ЛА с помощью бортового визира наземных ориентиров, в составе которого отсутствует измеритель дальности до наземного ориентира (дальномер).
Эту цель достигают следующим. Предварительно в память вычислителя, установленного на ЛА, вводят цифровую карту местности района, в котором проходит маршрут полета ЛА и находится заданный наземный объект, зависимость Hр(W, Q) высоты Hр рельефа местности от географических широты W и долготы Q, значение угла G магнитного склонения в этом районе, значения географических широты Wв, долготы Qв и высоты Hрв над уровнем моря местоположения заданного НО, а также зависимость Rз(W) радиуса Rз референц-эллипсоида Земли от W. В полете ЛА визируют заданный НО бортовым визиром ЛА и измеряют значения углов в горизонтальной и вертикальной плоскостях между визирной линией и продольной осью ЛА. Одновременно измеряют высоту Hл полета ЛА над рельефом местности, высоту Hм полета ЛА над уровнем моря, магнитный азимут продольной оси ЛА и угол T между продольной осью ЛА и гировертикалью. Измеренные значения углов и высот вводят в вычислитель ЛА и в нем с использованием всей введенной информации вычисляют координаты местоположения ЛА.
Сущность предлагаемого способа поясняется на фиг. 1 и фиг. 2. На фиг. 1 показаны положения ЛА и НО в момент определения координат местоположения ЛА в горизонтальной (фиг. 1а) и вертикальной (фиг. 1б) плоскостях. На фиг. 1 обозначено: ГМ - географический меридиан; ММ - магнитный меридиан; А - проекция центра массы ЛА на поверхность Земли; ПЛ - проекция направления продольной оси ЛА на горизонтальную плоскость N, проходящую через точку A; B - проекция центра массы НО на поверхность Земли; Дав - расстояние между точками A и B; C - проекция точки B на плоскость N; Дас - проекция Дав и визирной линии на плоскость N; G - угол магнитного склонения; M - магнитный азимут продольной оси ЛА; S - угол между визирной линией с ЛА на НО и продольной осью ЛА в горизонтальной плоскости; Г - географический азимут визирной линии в плоскости N; P - вертикальная плоскость, пересекающаяся с плоскостью N по прямой Дас; Л - положение центра массы ЛА в плоскости P; УМ - уровень моря; Нл - высота полета ЛА над рельефом местности; Нм - высота полета ЛА на уровнем моря; Нв - высота местоположения НО над уровнем моря; ПЛВ - проекция продольной оси ЛА на плоскость Р; R - угол в вертикальной плоскости между линией визирования и продольной осью ЛА; T - угол между ПЛВ и вертикалью; F - угол между визирной линией и вертикалью; На - высота точки A над уровнем моря.
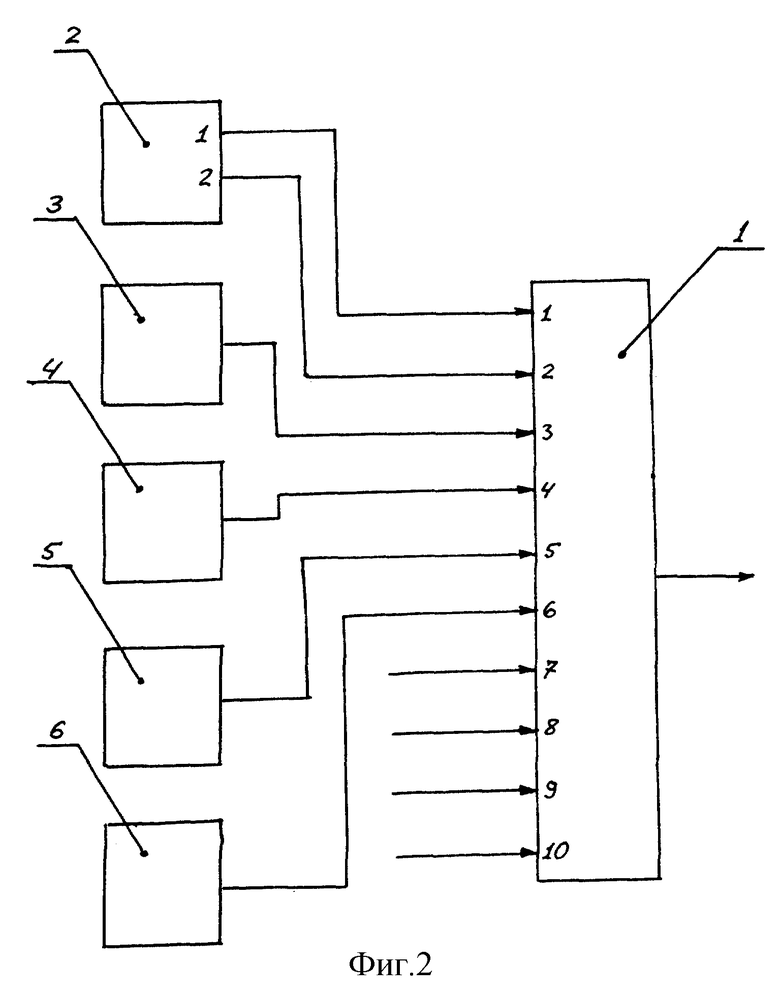
На фиг. 2 показана структурная схема возможного варианта устройства, реализующего предложенный способ. На фиг. 2 обозначено: 1 - вычислительный комплекс (ВК) ЛА; 2 - визир ЛА с угломерным устройством (ВУУ); 3 - гировертикаль (ГВ) ЛА; 4 - радиовысотомер (РВ); 5 - магнитный компас (МК); 6 - барометрический высотомер (БВ); ЦК - цифровая карта местности; Wв, Qв, Hв - заданные координаты НО.
Сущность предлагаемого способа состоит в следующем. Предварительно в память ВК ЛА вводят: а) ЦК местности района, в котором проходит маршрут полета ЛА; б) зависимость Hp(W,Q) высоты Hр рельефа местности над уровнем моря в этом районе от географических широты W и долготы Q; в) угол G магнитного склонения; г) географические широту Wв, долготу Qв и высоту Hв местоположения заданного НО; д) зависимость Rз(W) радиуса референц-эллипсоида Земли Rз от географической широты W. При определении местоположения ЛА в процессе его полета визируют заданный НО бортовым визиром ЛА, отклоняя бортовой визир от продольной оси ЛА до попадания визирной линии на заданный НО. В результате на ЛА измеряют значения углов S и R между продольной осью ЛА и визирной линией при попадании ее на заданный НО и подают измеренные значения S и R на соответствующие входы BK ЛА. Одновременно на ЛА измеряют: а) магнитный азимут M продольной оси ЛА; б) высоту Hл полета ЛА над местностью; в) высоту Hм полета ЛА над уровнем моря; г) угол T между продольной осью ЛА и вертикалью. Измеренные значения M, Hл, Hм и T подают на соответствующие входы ВК ЛА. С использованием введенной информации в ВК ЛА вычисляют:
1) угол Г между географическим меридианом ГМ и прямой AC, который в соответствии со схемой, показанной на фиг. 1а), определяется выражением
Г = М + G + S; (1)
2) угол F между линией визирования и вертикалью, который в соответствии со схемой, показанной на фиг. 1б, определяется выражением
F = T - R; (2)
3) расстояние Дас , которое в результате анализа треугольников ЛАВ и ABC (фиг. 1б) определяется выражением
Дас = (Hл - dH) • tg(F), (3)
где
dH = Hв - Hа, (4)
Hа = Hм - Hл, (5)
причем значение Hм измеряется барометрическим высотомером, который обладает сравнительно невысокой точностью, а значение Hл измеряется радиовысотомером;
4) географические широту Wа и долготу Qа точки A, которые в соответствии с фиг. 1а определяются выражениями


где a, e - известные значения большой полуоси и эксцентриситета референц-эллипсоида.
Алгориты, представленный выражениями (1)...(8), позволяет определить координаты Wa, Qa местоположения ЛА в первом приближении, точность которого определяется, в основном, ошибкой измерения высоты Hм барометрическим высотомером ЛА, которая вносит ошибку в вычисление значения Hа (5). Для уточнения значений Wa и Qa вычисляют:
5) значение Hра с использованием предварительно введенной в память вычислителя зависимости Hр (W, Q) и полученных значений Wa (6) и Qa (7)
Hра = Hp (Wa, Qa); (9)
6) уточненные значения координат Wa, Qa, для чего, полагая
Ha = Hpa, (10)
снова вычисляют значения dH, Дac, Wa, Qa в соответствии с выражениями (4), (3), (6) (7), выполняют операции (9), (10) и вновь выполняют операции (4), (3), (6), (7). Уточнение по этому алгоритму последовательных приближений выполняют до тех пор, пока разность значений Wa и Qa между двумя их соседними приближениями перестает превышать заданную величину, определяющую заданную точность вычисления географических координат Wa, Qa местоположения ЛА;
7) уточненное значение высоты Hм:
Hм = Hл - Hра. (11)
Таким образом, предлагаемый способ обеспечивает определение координат местоположения ЛА по известным координатам заданного наземного объекта без измерения дальности между ЛА и НО, чем и достигается цель изобретения.
Устройство, реализующее предлагаемый способ, содержит (фиг. 2) ВК 1, ВУУ 2, ГВ 3, РВ 4, МК 5, БВ 6, причем первый и второй выходы ВУУ 2 связаны соответственно с первым и вторым входами ВК 1, выход ГВ 3 связан с третьим входом ВК 1, выход РВ 4 связан с четвертым входом ВК 1, выход МК 5 связан с пятым входом ВК 1, а выход БВ 6 связан с шестым входом ВК 1.
Работает это устройство следующим образом. Предварительно на седьмой, восьмой, девятый и десятый входы ВК 1 подают соответственно ЦК, Hp (W, Q), G и координаты Wв, Qв, Hв и запоминают эту информацию в ВК 1. В ходе полета ЛА накладывают визирную линию визира ЛА на НО (визируют НО с ЛА) и с помощью ВУУ 2 измеряют углы S и R и подают их соответственно на первый и второй входы ВК 1, с помощью ГВ 3 измеряют угол T и подают его на третий вход ВК 1, с помощью РВ 4 измеряют высоту Hл и подают ее на четвертый вход ВК 1, с помощью МК 5 измеряют магнитный азимут M и подают его на пятый вход ВК 1, а с помощью БВ 6 измеряют высоту Hм и подают ее на шестой вход ВК 1. В ВК 1 с использованием указанной информации проводят вычисления в соответствии с алгоритмом, рассмотренным выше в п. 1)... п. 7), в результате которых получают значения координат Wa, Qa, Hм местоположения ЛА.
Источники информации
1. А.А. Куликовский (ред.), "Справочник по радиоэлектронике", том. 3, - М., "Энергия", 1970 г., стр. 485.
2. О.А. Бабич, "Обработка информации в навигационных комплексах", - М., "Машиностроение", 1991 г., стр. 225 - 226, рис. 3.14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ БОМБОМЕТАНИИ | 2001 |
|
RU2204106C2 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ОБЪЕКТА | 2000 |
|
RU2182713C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЦЕЛЬ | 2001 |
|
RU2204785C2 |
| СПОСОБ ЦЕЛЕУКАЗАНИЯ ПО НАПРАВЛЕНИЮ СИСТЕМЕ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117902C1 |
| СПОСОБ РАЗВЕДКИ | 2002 |
|
RU2229676C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА НА ЦЕЛЬ | 1997 |
|
RU2117312C1 |
| СПОСОБ РАДИООБМЕНА ИНФОРМАЦИЕЙ | 2000 |
|
RU2197065C2 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2353552C1 |
Изобретение относится к способам определения местоположения летательного аппарата (ЛА). Реализуется способ следующим образом: в полете ЛА визируют наземный ориентир с известными координатами и измеряют углы в вертикальной и горизонтальной плоскостях между визирной линией и продольной осью ЛА, полученную информацию вместе с дополнительно измеренными величинами вводят в вычислитель и находят в первом приближении значения географических долготы и широты ЛА, далее с использованием цифровой карты района полета вычисляют уточненное значение координат ЛА. Техническим результатом данного способа является то, что местоположение ЛА определяется только с помощью бортового визира и наземного ориентира, т.е. без специального измерителя дальности. 2 ил.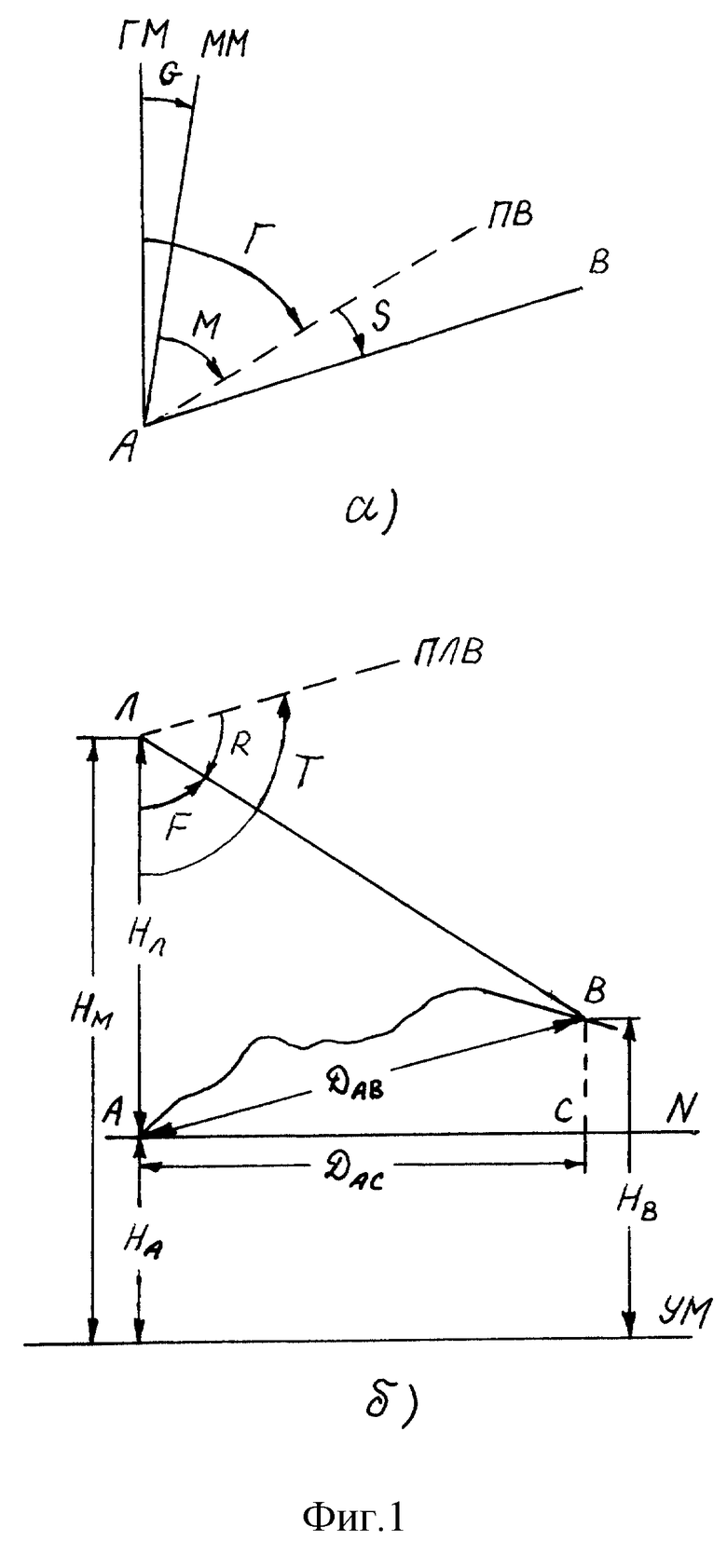
Способ определения местоположения летательного аппарата, который состоит в том, что предварительно вводят в память вычислителя, установленного на летательном аппарате, известные координаты местоположения заданного наземного объекта, в полете летательного аппарата визируют наземный объект бортовым визиром летательного аппарата и с использованием введенных координат этого наземного объекта и измеренных величин вычисляют координаты местоположения летательного аппарата, отличающийся тем, что предварительно в память вычислителя дополнительно вводят цифровую карту местности района, в котором проходит маршрут полета летательного аппарата, зависимость Hp(W,Q) высоты Hp рельефа местности от географической широты W и долготы Q в этом районе, значение G угла магнитного склонения, а также зависимость R3(W) радиуса R3 референц-эллипсоида Земли от W, в полете летательного аппарата измеряют значения углов S и R соответственно в горизонтальной и вертикальной плоскостях между визирной линией и продольной осью летательного аппарата, одновременно измеряют высоту Hл полета летательного аппарата над рельефом местности, высоту Hм полета летательного аппарата над уровнем моря, магнитный азимут M продольной оси летательного аппарата и угол T между продольной осью летательного аппарата и вертикалью, вводят измеренные значения S, R, Hл, Hм, M и T в вычислитель летательного аппарата, с использованием Hм и Hл вычисляют в первом приближении значение Hpa высоты рельефа местности в точке А проекции центра массы летательного аппарата на поверхность Земли, с использованием S, R, Hpa, M, T, G, R3(W) и координат заданного наземного объекта вычисляют в первом приближении значения географической широты Wa и географической долготы Qa местоположения летательного аппарата по зависимости Hp(W,Q), с использованием цифровой карты и значений Wa, Qa вычисляют уточненное значение высоты Hpa, с использованием которого вычисляют уточненные значение Wa и Qa.
| RU 2059205 C1, 27.04.96 | |||
| УСТРОЙСТВО для ДОДЕТЕКТОРНОГО АВТОВЫБОРА | 0 |
|
SU381178A1 |
| US 4675823 A, 23.06.87 | |||
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |
