Изобретение относится к области транспорта, а именно к базовым шасси с гидрообъемной трансмиссией, преимущественно агрегатируемым с различным технологическим дорожно-строительным и сельскохозяйственным оборудованием.
Известно устройство, содержащее силовую установку с регулируемыми насосами привода технологического оборудования, насосами привода хода, напорные трубопроводы насосов привода хода соединены между собой через двухпозиционные распределители и с напорными трубопроводами насосов технологического оборудования через трехпозиционные распределители, блоки управления, соединенные линиями управления с регулируемыми насосами, бортовые редукторы с гидромоторами привода хода [1].
Недостатками этого устройства является реверсирование гидромоторов привода хода посредством распределителей, что приводит к возникновению пиковых нагрузок в момент переключения распределителей и нагреву масла. Кроме того, для предотвращения работы гидромоторов в режиме насосов при движении машины под уклон на гидромоторах необходимо установить противообгонные клапаны, что усложняет и удорожает гидросистему.
Наиболее близким к изобретению по технической сущности и достигаемому результату является транспортное средство, преимущественно агрегатируемое с технологическим дорожно-строительным и сельскохозяйственным оборудованием, содержащее силовую установку, поворотный кронштейн с креслом водителя, сцепное устройство с опорным колесом и гидроцилиндрами поворота [2].
К недостаткам этого известного устройства относится то, что при повороте кресла водителя для длительного движения, например, задом, направления движений водителя не соответствуют тем, которые он выполняет при движении машины передом. Так для поворота, например, налево, руль приходилось поворачивать вправо. Это создавало затруднения в управлении машиной.
Предлагаемое изобретение направлено на упорядочение движений водителя в соответствии с направлением движения модуля (движение машины передом или задом) и на исключение возникновения пиковых давлений в гидросистеме привода хода путем исключения распределителей, реверсирующих направление вращения гидромоторов.
Указанный технический результат достигается за счет того, что в силовом модуле, содержащем силовую установку с регулируемыми насосами привода технологического оборудования и привода хода, напорные трубопроводы насосов привода хода сообщены между собой через двухпозиционные распределители и с напорными трубопроводами насосов технологического оборудования через трехпозиционные распределители, блоки управления, соединенные линиями управления с регулируемыми насосами, бортовые редукторы с гидромоторами привода хода, сцепное устройство с опорным колесом и гидроцилиндрами поворота и поворотный кронштейн с креслом водителя, насосы привода хода выполнены реверсивными с линиями подпитки, напорные и сливные каналы трехпозиционных распределителей объединены трубопроводами, сливной трубопровод снабжен переливным клапаном, при этом переливной клапан поддерживает в сливном трубопроводе давление большее, чем сопротивление в линии подпитки реверсивных насосов, линии управления реверсивными насосами снабжены распределителем, выполненным двухпозиционным, а блоки управления смонтированы на поворотном кронштейне, напорные трубопроводы гидроцилиндров поворота снабжены распределителем, выполненным двухпозиционным.
В предлагаемом силовом модуле реверсивное управление обеспечивает движение машины на дороге в транспортном режиме, например, передом, при этом технологическое оборудование находится за спиной водителя и в этом случае оно не мешает обзорности дорожного покрытия. В рабочем режиме кресло водителя повернуто на 180o и модуль движется задом, при этом технологическое оборудование находится перед глазами водителя, т.е. он хорошо видит это оборудование и управляет им.
Кроме того, направления движений водителя по управлению модулем остаются тем же, что и при движении модуля передом, и при его движении задом.
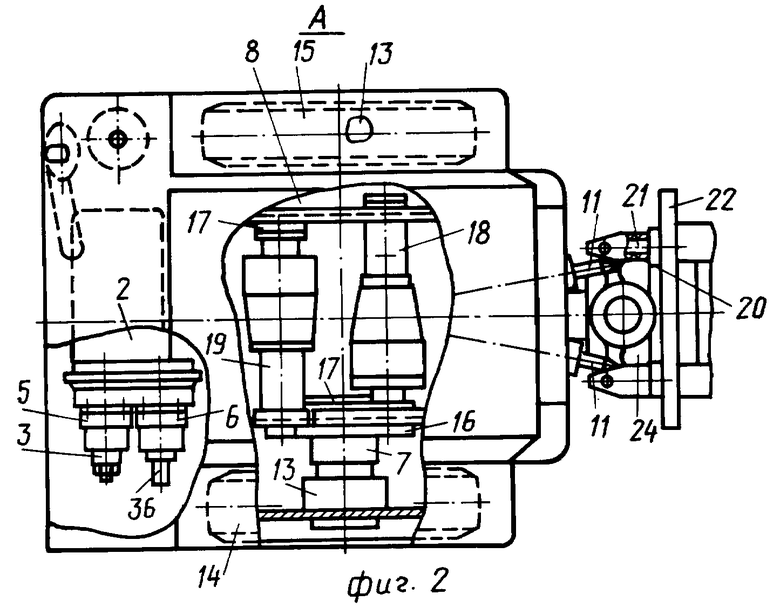
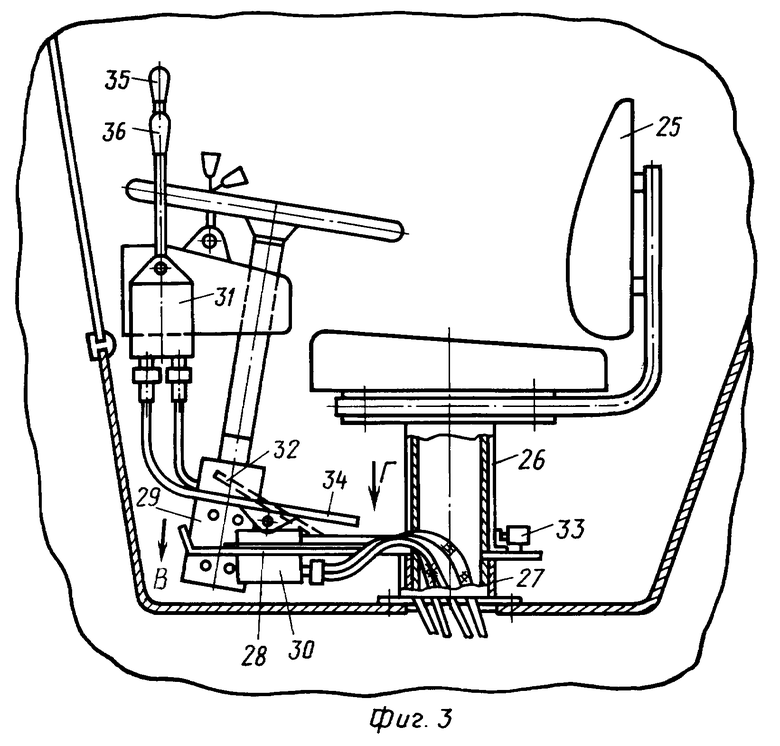
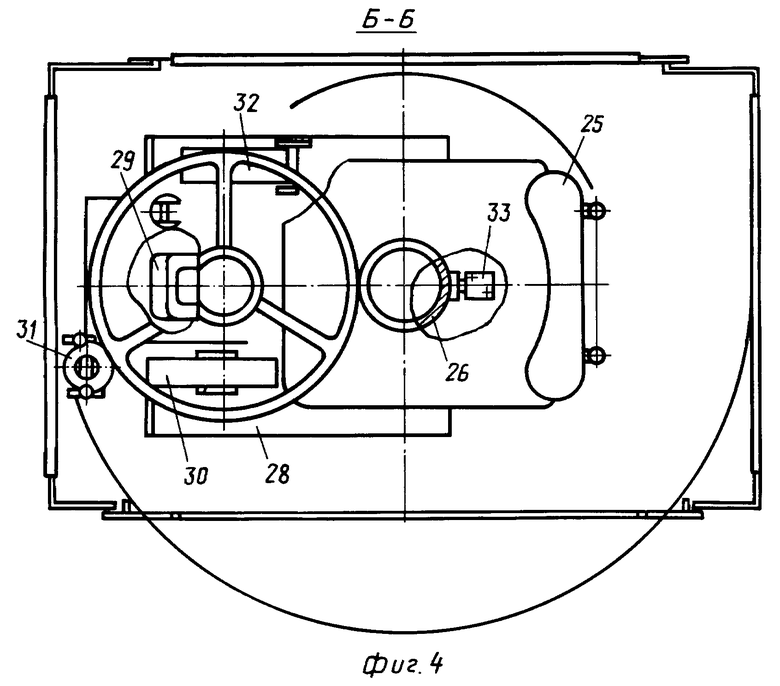
На фиг. 1 показан модуль силовой (дополнительно опорное колесо опущено, технологическое оборудование не показано); на фиг. 2 - вид по стрелке А; на фиг. 3 - поворотный кронштейн с креслом водителя; на фиг. 4 - сечение Б-Б, вид в плане на поворотный кронштейн с креслом водителя; на фиг. 5 и 6 дана принципиальная гидросистема силового модуля.
Модуль силовой (модуль Самуйлова) преимущественно для работы с технологическим дорожно-строительным и сельскохозяйственным оборудованием, содержащий силовую установку 1, включающую дизельный двигатель 2, регулируемые насосы 3, 4 привода технологического оборудования 5, 6 привода хода, бортовые редукторы 7, 8 привода хода, сцепное устройство 9 с дополнительным опорным колесом 10 и гидроцилиндрами поворота 11 и поворотный кронштейн 12.
Бортовые редукторы 7, 8, включают ступичные редукторы 13, на которых закреплены ведущие колеса 14, 15, цилиндрические редукторы 16 планетарные редукторы 17, соединенные с гидромоторами привода хода 18, 19 (конструкцию бортового привода см. патент РФ N 2045836).
Сцепное устройство 9 содержит корпуса 20 с захватами (на чертеже не показаны), которые фиксируют шкворни 21 технологического оборудования 22 (показана только опорная балка со шкворнями). Опорное колесо 10 имеет привод в виде гидроцилиндра 23, и закреплено на опорном кронштейне 24, шарнирно соединенным с гидроцилиндрами поворота 11.
Поворотный кронштейн 12 включает сиденье водителя 25, закрепленное на стойке 26, входящей в шарнир 27, опорную площадку 28, на которой закреплены гидроруль 29, блок управления 30, регулируемыми реверсивными насосами 5, 6 и блок управления 31 регулируемыми насосами 3, 4.
Кроме того, на опорной площадке 28 смонтирована педаль акселлератора 32, соединенная известным образом гибким приводным устройством (на чертеже не показано) с топливным насосом двигателя 2.
Рукава высокого давления (на чертеже показан частично), соединяющие гидроруль 29 с гидроцилиндрами поворота 11, блоки управления 30, 31 с регулируемыми насосами и гибкое приводное устройство проходят внутри стойки 26 и шарнира 27, поворотного кронштейна 12.
На опорной площадке 28 смонтирован датчик 33 положения поворотного кронштейна 12 (кресла водителя 25), например, выполненный в виде микропереключателя, который срабатывает при повороте кронштейна (сиденья) на 180o.
Блок управления 30 снабжен педалью 34, наклоняя которую в ту или другую сторону, водитель меняет направление движения модуля.
Блок управления 31 снабжен рукоятками 35 и 36 с фиксированным положением каждой. Рукояткой 35 изменяется производительность насоса 3, а рукояткой 36 - насоса 4.
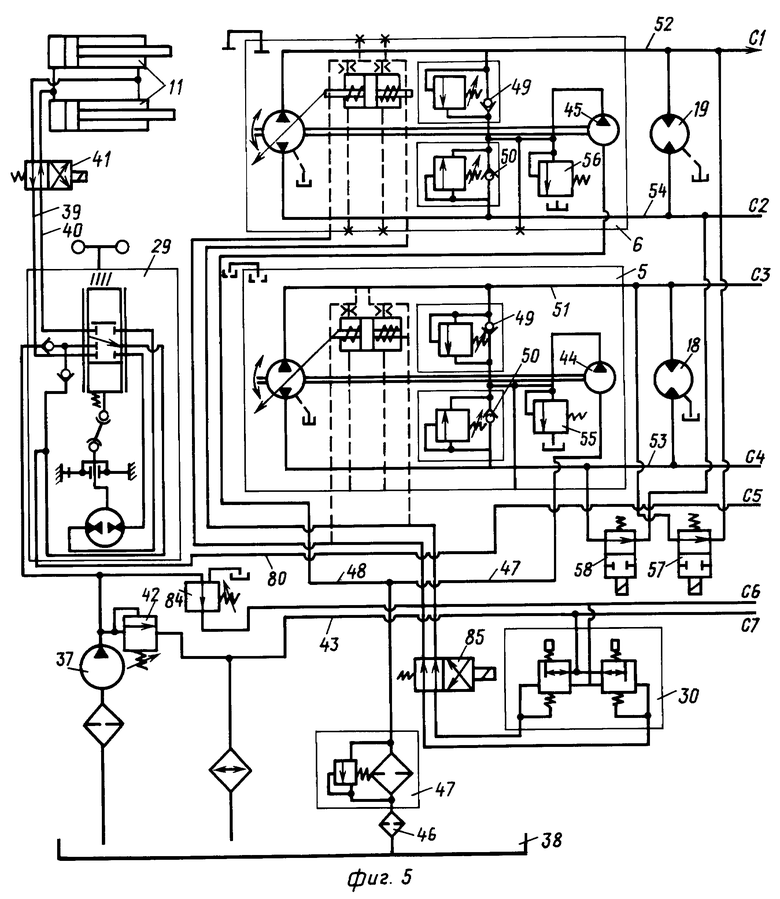
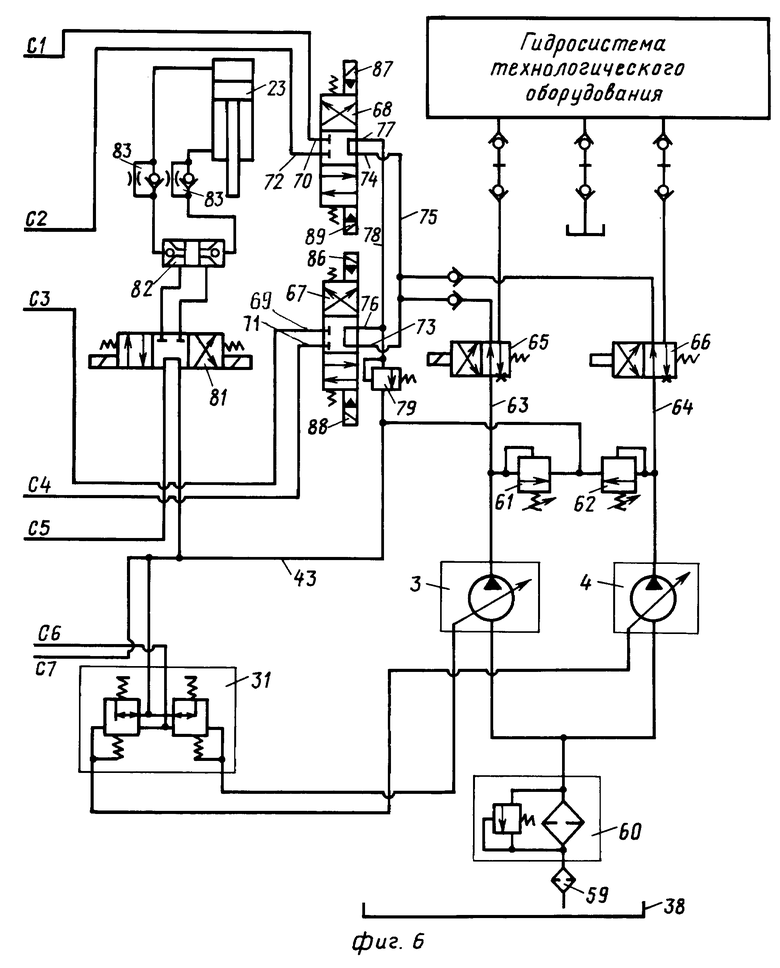
Принципиальная гидросистема силового модуля представлена на фиг. 5 и 6.
Насос 37 через заборный фильтр подает рабочую жидкость из гидробака 38 к гидрорулю 29 и по напорным трубопроводам 39 и 40 через двухпозиционный распределитель 41 - к гидроцилиндрам поворота 11. Насос 37 защищен от перегрузки предохранительным клапаном 42, соединенным с общим сливным трубопроводом 43.
К насосам подпитки 44 и 45 регулируемых насосов 5 и 6 рабочая жидкость поступает через заборный фильтр 46 и фильтр тонкой очистки 37 по трубопроводам 47 и 48 и далее через обратные клапаны 49 или 50 в напорные 51 и 52 и сливные 53 и 54 трубопроводы гидромоторов привода хода 18 и 19. Клапаны 55 и 56 определяют давление в линиях подпитки насосов 5 и 6.
Напорные трубопроводы 51 и 52, связывающие насосы 5 и 6 с гидромоторами 18 и 19, соединены между собой распределителем 57, выполненным двухпозиционным, а сливные трубопроводы 53 и 54 соединены между собой аналогичным распределителем 58.
Рабочая жидкость из гидробака 38 через заборный фильтр 59 и фильтр такой очистки 60 поступают к насосам 3 и 4. Насосы 3 и 4 защищены от перегрузки предохранительным клапаном 61 и 62. В напорных трубопроводах 63 и 64 насосов 3 и 4 установлены двухпозиционные распределители 65 и 66, направляющие рабочую жидкость или в гидросистему технологического оборудования, или через трехпозиционные распределители 67 и 68 в напорные или сливные трубопроводы гидромоторов 18 и 19.
Рабочие каналы 69 и 70 распределителей 67 и 68 соединены с напорными трубопроводами 51 и 52 гидромоторов 18 и 19, а рабочие каналы 71 и 72 - со сливными трубопроводами 53 и 54.
В напорные каналы 73 и 74 распределителей 67 и 68 рабочая жидкость поступает из объединенного трубопровода 75, соединенного с напорными трубопроводами 63 и 64 насосов 3 и 4. Сливные каналы 76 и 77 распределителей 67 и 68 объединены трубопроводом 78, который снабжен переливным клапаном 79, поддерживающим давление в сливном трубопроводе большее, чем сопротивление во всасывающих магистралях насосов 5 и 6 (в линиях подпитки этих насосов). Трубопровод 78, через клапан 79 соединен с общей сливной магистралью 43.
В гидроцилиндр 23 привода опорного колеса 10 рабочая жидкость поступает из сливного трубопровода 80 гидроруля 29 через распределитель 81, гидрозамок 82 и дроссели с обратным клапаном 83.
К блокам управления 30 и 31 рабочая жидкость поступает от насоса 37 через редукционный клапан 84. В линии управления реверсивными насосами 5 и 6 от блока управления 30 установлен распределитель 85, выполненный двухпозиционным. Блок управления 31 соединен соответствующими линиями управления с насосами 3 и 4.
Соединения трубопроводов на фиг. 5 с соответствующими трубопроводами на фиг. 6 обозначены C1...C7.
Модуль силовой работает следующим образом.
При движении силового модуля в процессе подсоединения технологического оборудования (на чертеже показан только узел соединения технологического оборудования с модулем) дополнительное опорное колесо 10 опущено на покрытие, как показано на фиг. 1 и движение модуля осуществляется, например, в сторону силовой установки (вперед).
При движении модуля в рабочем режиме направление движения обратное, в сторону сцепного устройства (назад), сиденье водителя повернуто на 180o, опорное колесо поднято. Модуль имеет вторую опорную ось - ось технологического оборудования (на чертеже не показано. См. патент РФ N 2042555).
При движении модуля в транспортном режиме модуль соединен с технологическим оборудованием, опорное колесо 10 поднято, кресло водителя 25 установлено, как показано на фиг. 1.
Управление модулем осуществляется следующим образом.
Водитель ногой поворачивает педаль 34 блока управления 30 в направлении стрелки. При этом насосы 5 и 6 начинают подавать рабочую жидкость к гидромоторам 18 и 19, которые через бортовые редукторы 7 и 8 приводят во вращение ведущие колеса 14 и 15. Модуль начинает движение вперед. Для движения модуля назад водитель должен повернуть педаль 34 по направлению стрелки Г. При этом за счет реверса насосов 5 и 6 гидромотором 18 и 19 изменяют направление вращения на обратное.
Транспортная скорость движения модуля обеспечивается за счет использования регулируемых реверсивных насосов 5 и 6, соединенных по закрытой схеме с гидромоторами 18 и 19 привода хода, и регулируемых насосов 3 и 4, работающих по открытой схеме. Использование насосов 3 и 4 осуществляется после соответствующего включения двухпозиционных распределителей 65 и 66 и трехпозиционных распределителей 67 и 68.
Для увеличения транспортной скорости модуля (частоты вращения гидромоторов 18 и 19) водитель блоком управления включает насосы 3 и 4 и при прямом движении включает электромагниты 86 и 87 распределителей 67 и 68, а при обратном движении - электромагниты 88 и 89.
Рабочая жидкость от насосов 3 и 4 через напорные каналы 73 и 74 распределителей 67 и 68 и рабочие каналы 69 и 70 поступает в напорные трубопроводы 51 и 52 гидромоторов 18 и 19.
После гидромоторов 18 и 19 рабочая жидкость поступает в сливные (всасывающие) трубопроводы 53, 54, из которых часть рабочей жидкости забирается насосами 5 и 6 в соответствии с частотой их вращения, а остальная рабочая жидкость по рабочим клапанам 71 и 72, и сливным каналам 76 и 77 в сливной трубопровод 78 и через переливной клапан 79 направляется в общую сливную магистраль 43. Так как клапан 79 настроен на давление превышающее сопротивление движению жидкости во всасывающих трубопроводах 53 и 54 и линиях подпитки, то питание насосов 5 и 6 рабочей жидкостью обеспечено.
При включении электромагнитов 88 и 89 функциональное значение трубопроводов насосов 5 и 6 (гидромоторов 18 и 19) изменяется на обратное.
Движение модуля в рабочем режиме может осуществляться следующим образом:
1. Малые (ползучие) рабочие скорости силового модуля обеспечиваются следующим образом. Насосы 5 и 6 привода хода находятся в нейтральном положении. Работа гидромоторов 18 и 19 осуществляются за счет подачи рабочей жидкости к ним, например, насосом 3. Насос 4 включен на подачу рабочей жидкости в гидросистему технологического оборудования.
В этом случае гидромоторы 18 и 19 имеют минимальную частоту вращения.
2. Вращение гидромоторов 18 и 19 осуществляется подачей рабочей жидкости от насосов 5 и 6. Скорости движения модуля средние. В этом случае на привод технологического оборудования могут использоваться оба насоса 3 и 4.
3. Вращение гидромоторов 18 и 19 может осуществляться за счет подачи рабочей жидкости насосами 5 и 6 и насосом, например, 3. Насос 4 используется для привода технологического оборудования.
Силовой модуль имеет реверсивное управление. Оно обеспечивается тем, что на поворотном кронштейне 12 смонтировано кресло водителя 25, гидроруль 29, блоки управления 30 и 31 и педаль акселератора 32. Кроме того, датчик 33 положения кресла водителя (поворотного кронштейна 12) при повороте кресла на 180o переключает двухпозиционные распределители 41 и 85 и распределители 67 и 68. При включении электромагнитов 88 и 89 рабочая жидкость подается в трубопровод 53 и 54, которые становятся напорными, и движение машины изменяется на обратное, при этом движения водителя по управлению машиной после поворота кресла не изменяются.
При движении модуля на криволинейных участках ведущие колеса имеют разные частоты вращения. Разная частота вращения колес обеспечивается тем, что напорные 51 и 52 и сливные 53 и 54 трубопроводы соединены попарно двухпозиционными распределителями 57 и 58. Происходит перетекание рабочей жидкости из напорного трубопровода 51 в напорный трубопровод 52 через распределитель 57, или из трубопровода 53 в трубопровод 53 через распределитель 58.
При попадании модуля в сложные дорожные условия водитель переключает распределители 57 и 58 в другое положение. Трубопроводы 51 и 52, 53 и 54 разъединяются. Происходит, так называемая, блокировка. В этом случае модуль имеет независимый привод каждого борта, что повышает проходимость машины.
Использование в гидросистеме силового модуля закрытой схемы в приводе хода машины, и ее объединение с открытой схемой, применяемой в приводе технологического оборудования, значительно расширяет диапазон регулирования трансмиссии машины. Такое конструктивное решение стало возможным благодаря тому, что в сливной трубопровод 78 был введен переливной клапан 79.
Кроме того, реверсивное управление модулем расширило технические возможности машины для работы с различным технологическим оборудованием. Реверсивное управление модулем стало возможным благодаря тому, что на поворотном кронштейне 12 были размещены блоки управления 30 и 31 регулируемыми насосами, а в линиях управления насосами 5 и 6 и в напорных трубопроводах гидроцилиндров 11 поворота были установлены распределители 41 и 85.
Источники информации
1. Укладчик дорожных покрытий. Патент РФ N 2000379, БИ N 33-36, 1993 г.
2. Транспортное средство. Патент РФ N 2042555, БИ N 24, 1995 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2042555C1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 2005 |
|
RU2304667C1 |
| Гидрообъемная трансмиссия транспортного средства с рекуперацией энергии торможения | 1986 |
|
SU1346456A1 |
| Мобильный технологический комплекс зачистки и мойки жестких резервуаров | 2016 |
|
RU2616051C1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
| САМОХОДНАЯ МАШИНА ДЛЯ ОБРАБОТКИ АЛЮМИНИЕВЫХ ЭЛЕКТРОЛИЗЕРОВ | 2015 |
|
RU2593251C1 |
| Трансмиссия дорожной машины | 1987 |
|
SU1675132A1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ГИДРООБЪЕМНЫЙ ПРИВОД ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА АВТОМАТИЧЕСКОЙ СМЕНЫ РАБОЧЕЙ ЖИДКОСТИ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, НАСОСНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА, СИСТЕМА КОНДИЦИОНИРОВАНИЯ И РЕВЕРСА ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА И ГИДРОМОТОРНЫЙ АГРЕГАТ ГИДРООБЪЕМНОГО ПРИВОДА ХОДОВОЙ ЧАСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2108507C1 |
Изобретение относится к транспорту, а именно к базовым шасси с гидрообъемной трансмиссией, преимущественно агрегатируемым с различным технологическим дорожно-строительным и сельскохозяйственным оборудованием. Силовой модуль содержит силовую установку с регулируемыми насосами привода технологического оборудования и привода хода, напорные трубопроводы насосов привода хода соединены между собой двухпозиционными распределителями и с напорными трубопроводами насосов технологического оборудования - трехпозиционными распределителями, блоки управления, соединенные с регулируемыми насосами, бортовые редукторы с гидромоторами привода хода, сцепное устройство с опорным колесом и гидроцилиндрами поворота и поворотный кронштейн с креслом водителя. Насосы привода хода выполнены реверсивными, напорные и сливные каналы распределителей попарно объединены трубопроводами, при этом сливной трубопровод снабжен переливным клапаном. Изобретение направлено на упорядочение движений водителя в соответствии с направлением движения модуля и на исключение возникновения пиковых давлений в гидросистеме привода хода путем исключения распределителей, реверсирующих вращение гидромоторов. 4 з.п. ф-лы, 6 ил.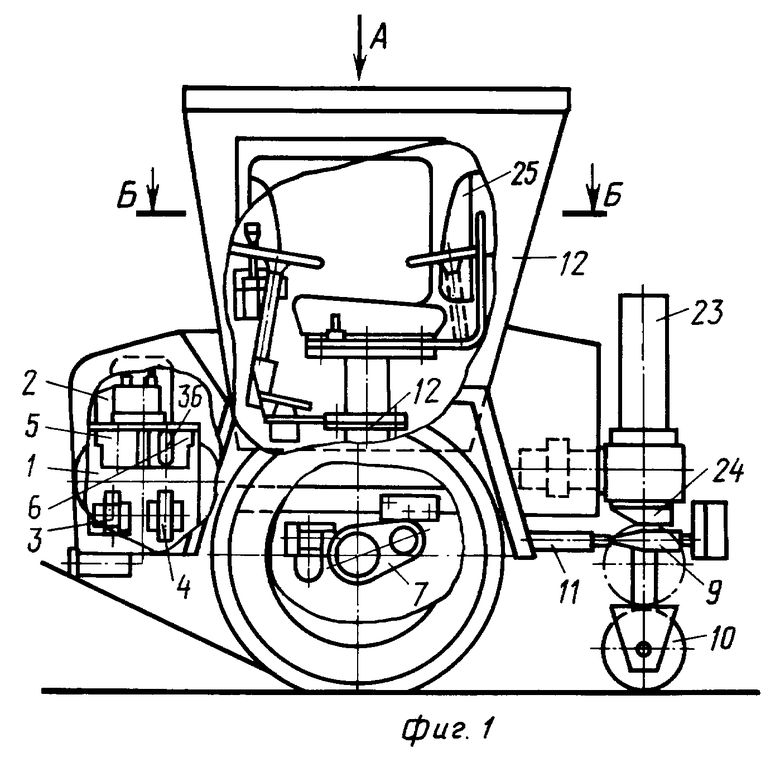
| ТРАНСПОРТНОЕ СРЕДСТВО | 1993 |
|
RU2042555C1 |
| RU 2000379 C1, 07.09.93 | |||
| RU 2055756 C1, 10.03.96 | |||
| Гидрообъемная передача транспортного средства | 1987 |
|
SU1444180A1 |
| ЛИНИЯ ИЗГОТОВЛЕНИЯ ЗИГЗАГООБРАЗНЫХ ИЗДЕЛИЙ | 1994 |
|
RU2084302C1 |
| УМЕНЬШЕНИЕ НЕЖЕЛАТЕЛЬНЫХ ПОБОЧНЫХ ЭФФЕКТОВ ПРИ ИСПОЛЬЗОВАНИИ АДСОРБИРУЮЩИХ ИЗДЕЛИЙ С ПОМОЩЬЮ РЕГУЛИРОВАНИЯ УРОВНЯ pH | 1998 |
|
RU2212250C2 |
| ЗАМОК ДЛЯ СТВОРКИ | 2003 |
|
RU2257453C2 |
| ВИЛКА | 2018 |
|
RU2685264C1 |
| DE 1630122 A, 14.05.75. | |||
