Изобретение относится к системам автоматического регулирования, а конкретно к системам стабилизации и наведения артиллерийского вооружения подвижных объектов, например, блока оружия боевой машины пехоты (БМП).
Известны системы управления инерционными объектами, например, антенными системами [1] , в которых возникают затруднения при формировании компенсационного сигнала, пропорционального первой производной от управляющего воздействия. Это приводит к усложнению схемных решений, например, к использованию буферных следящих систем.
Известна также (принятая за прототип) система стабилизации и наведения танка Т-80 (стабилизатор 2Э 42) [2], имеющая в своей структуре компенсатор скоростной ошибки. Блочная схема данной системы представлена на фиг.1. Система содержит последовательно соединенные чувствительный элемент 1, сумматор 2, усилитель мощности 3 и исполнительный привод 4, выход которого соединен с входом чувствительного элемента 1. Кроме того, система содержит источник управляющего воздействия 5 (пульт управления), выход которого соединен со вторым входом сумматора 2, а также через формирователь первой производной от управляющего воздействия 6 с третьим входом сумматора 2.
Система работает следующим образом. При работе системы в режиме наведения от источника управляющего воздействия 5 для снижения скоростной составляющей динамической ошибки используют сигнал первой производной от управляющего воздействия, который получают на выходе формирователя 6, вход которого соединен с выходом источника управляющего воздействия 5. Сигнал с выхода формирователя 6 подают на вход сумматора 2 с обратным знаком с сигналом скоростной ошибки, поступающим от чувствительного элемента 1. Подбором величины сигнала формирователя 6 добиваются минимума скоростной ошибки системы при наведении от источника управляющего воздействия 5.
Недостатком описанной системы является пониженная точность при работе в режиме стабилизации из-за отсутствия возможности компенсации скоростной ошибки, вызванной возмущениями от разворотов носителя при его движении по пересеченной местности. В этом режиме отсутствует наведение, а значит, и не работает компенсатор по сигналу первой производной от управляющего воздействия.
Предлагаемое техническое решение направлено на повышение точности работы путем снижения скоростной ошибки системы за счет обеспечения возможности компенсации скоростной ошибки, как в режиме наведения, так и в режиме стабилизации при разворотах носителя (корпуса БМП).
Сущность предлагаемого технического решения заключается в том, что в систему стабилизации и наведения, содержащую последовательно соединенные чувствительный элемент, сумматор, усилитель мощности и исполнительный привод, выход которого соединен со входом чувствительного элемента, а также источник управляющего воздействия, выход которого соединен со вторым входом сумматора, введены датчик тока, датчик напряжения и формирователь компенсирующего сигнала, выход которого соединен с третьим входом сумматора, причем, вход датчика тока соединен с первым выходом усилителя мощности, выход - с первым входом формирователя компенсирующего сигнала, вход датчика напряжения соединен со вторым выходом усилителя мощности, а выход - со вторым входом формирователя компенсирующего сигнала.
Материалы заявки поясняются чертежами, где:
- на фиг.1 представлена блочная схема системы стабилизации и наведения (стабилизатор 2Э 42 ), принятой за прототип;
- на фиг.2 представлена блочная схема предлагаемой системы стабилизации и наведения.
Сведения, подтверждающие возможность осуществления предлагаемого технического решения с получением вышеуказанного технического результата, заключаются в следующем.
Предлагаемая система стабилизации и наведения (фиг.2) состоит из последовательно соединенных чувствительного элемента 1, сумматора 2, усилителя мощности 3 и исполнительного привода 4, выход которого соединен со входом чувствительного элемента 1.
В систему также входят: источник управляющего воздействия 5, выход которого соединен со вторым входом сумматора 2; датчик тока 6, вход которого соединен с первым выходом усилителя мощности 3, а выход - с первым входом формирователя компенсирующего сигнала 7; датчик напряжения 8, вход которого соединен со вторым выходом усилителя мощности 3, а выход - со вторым входом формирователя компенсирующего сигнала 7.
Кроме того, выход формирователя компенсирующего сигнала 7 соединен с третьим входом сумматора 2.
Предлагаемая система работает следующим образом.
Для электродвигателя постоянного тока, используемого в исполнительном приводе 4, известно выражение:
UДВ=Uумвых=IДВ•R+Е, - (1)
где Е - ЭДС двигателя;
IДВ - ток в якорной цепи двигателя;
R - суммарное сопротивление якорной цепи, включая внешнее сопротивление источника питания и проводов.
Е=КВ•Ф•n=КДВ•n. - (2)
KДВ=KE•Ф,
где KЕ - постоянный коэффициент двигателя;
Ф - постоянный магнитный поток двигателя;
n - скорость вращения двигателя.
Следовательно:
КДВ•η=UУМ-IДВ•R. - (3)
Из формулы (3) видно, что для получения компенсационного сигнала, пропорционального скорости вращения электродвигателя, необходимо из напряжения на выходе усилителя мощности вычесть составляющую, пропорциональную току, протекающему через двигатель (IДВ•R).
Для обеспечения выработки данного компенсационного сигнала в систему введен датчик тока 6, измеряющий ток в двигателе. Вход датчика тока 6 подключен к первому выходу усилителя мощности 3. Кроме того, в систему введен датчик напряжения 8, измеряющей напряжение на втором выходе усилителя мощности 3. Сигнал датчика тока 6 поступает на первый вход формирователя 7, а сигнал датчика напряжения 8 поступает на второй вход формирователя 7. Формирователь 7 реализует формулу (3) и формирует на своем выходе компенсационный сигнал, пропорциональный скорости вращения электродвигателя, а значит и скорости вращения объекта регулирования. Причем в этом случае, в отличие от прототипа, компенсационный сигнал формируется как в режиме наведения от источника управляющего воздействия 5 (пульта управления), так и в режиме стабилизации при разворотах корпуса носителя. Тем самым обеспечивается компенсация скоростной ошибки системы во всех режимах работы системы стабилизации и наведения, что в конечном счете улучшает ее точностные параметры.
Предлагаемое техническое решение проверено электронным моделированием, а также экспериментальной проверкой макета системы стабилизации и наведения блока оружия перспективной БМП. Результаты проверки показали, что предлагаемое решение позволяет снизить скоростную ошибку примерно на 20%.
По результатам экспериментальной проверки предлагаемое техническое решение введено в документацию модернизированного стабилизатора блока оружия перспективной БМП.
Литература
1. Основы проектирования следящих систем. Под ред. Н.А. Лакоты, М., "Машиностроение", 1978 г., стр. 15-21.
2. Стабилизатор 2Э 42. Техническое описание. Архив ГУЛ "ВНИИ "Сигнал", 1998 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2000 |
|
RU2204784C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2000 |
|
RU2190180C2 |
| ЦИФРОВАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 2000 |
|
RU2183848C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2002 |
|
RU2230279C1 |
| Система наведения и стабилизации | 2020 |
|
RU2735789C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩИЙ ПРИВОД | 2007 |
|
RU2361258C1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |

Изобретение относится к системам автоматического регулирования, а конкретно к системам стабилизации и наведения артиллерийского вооружения подвижных объектов, например блока оружия боевой машины пехоты (БМП). Технический результат: повышение точности работы. Сущность предлагаемого технического решения заключается в том, что в систему стабилизации и наведения, содержащую последовательно соединенные чувствительный элемент, сумматор, усилитель мощности и исполнительный привод, выход которого соединен со входом чувствительного элемента, а также источник управляющего воздействия, выход которого соединен со вторым входом сумматора, введены датчик тока, датчик напряжения и формирователь компенсирующего сигнала, выход которого соединен с третьим входом сумматора. Причем вход датчика тока соединен с первым выходом усилителя мощности, выход - с первым входом формирователя компенсирующего сигнала, вход датчика напряжения соединен со вторым выходом усилителя мощности, а выход - со вторым входом формирователя компенсирующего сигнала. 2 ил.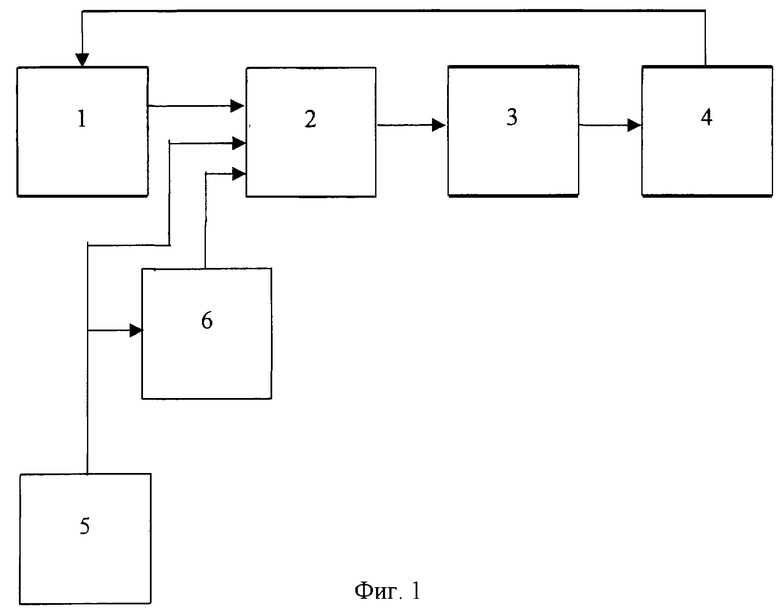
Система стабилизации и наведения, содержащая последовательно соединенные чувствительный элемент, сумматор, усилитель мощности и исполнительный привод, выход которого соединен со входом чувствительного элемента, а также источник управляющего воздействия, выход которого соединен со вторым входом сумматора, отличающаяся тем, что в нее введены датчик тока, датчик напряжения и формирователь компенсирующего сигнала, выход которого соединен с третьим входом сумматора, причем вход датчика тока соединен с первым выходом усилителя мощности, выход - с первым входом формирователя компенсирующего сигнала, вход датчика напряжения соединен со вторым выходом усилителя мощности, а выход - со вторым входом формирователя компенсирующего сигнала.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Техническое описание | |||
| - Архив ГУП "ВНИИ "Сигнал", 1988, С.18, 26, 27 | |||
| ЭЛЕКТРОПРИВОД | 1991 |
|
RU2045734C1 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| КОМПОЗИЦИЯ И СПОСОБ С ИСПОЛЬЗОВАНИЕМ СТАБИЛИЗИРОВАННОГО ЧУВСТВИТЕЛЬНОГО ИНГРЕДИЕНТА | 2008 |
|
RU2466741C2 |
| СПОСОБ ОСВОЕНИЯ СКВАЖИНЫ | 1998 |
|
RU2127805C1 |

