Изобретение относится к автоматике и может быть использовано при проектировании систем автоматического управления нестационарными и параметрически неопределенными объектами.
Известна система автоматического управления (САУ) нестационарным объектом n-го порядка [1], содержащая объект, который подсоединен входом к выходу усилителя мощности, элемент сравнения, который подключен одним входом через модель-эталон к задатчику, другим входом к выходу объекта и выходом ко входу корректирующего устройства в виде последовательно соединенных интегратора, m-1 интегросумматоров и суммирующего усилителя, при этом один из входов первых n-1 интегросумматоров подсоединен к выходу элемента сравнения, другой вход последних n-1 интегросумматоров подключен к выходу суммирующего усилителя, третий вход n-го интегросумматора подсоединен к задатчику, третий вход последних m-n интегросумматоров и второй вход суммирующего усилителя подключены к выходу объекта, блок умножения, усилитель мощности, три инерционных фильтра, блок деления, три суммирующих элемента, два блока выделения модуля, источник напряжения смещения и дифференцирующий фильтр в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, причем блок умножения соединен одним входом с выходом корректирующего устройства, другим входом с выходом блока деления, выходом со входом усилителя мощности и через первый инерционный фильтр со входом первого блока выделения модуля, подключенного выходом к одному из входов первого суммирующего элемента, который соединен другим входом с выходом источника напряжения смещения, выходом с первым из входов блока деления, второй суммирующий элемент подключен одним входом к задатчику, другим входом к выходу корректирующего устройства, выходом через второй инерционный фильтр к одному из входов первого интегросумматора дифференцирующего фильтра, другой из входов всех интегросумматоров которого подсоединен через третий инерционный фильтр к выходу объекта, третий из входов интегросумматоров дифференцирующего фильтра соединен с выходом своего суммирующего усилителя, один из входов которого подключен к выходу объекта, третий суммирующий элемент подсоединен одним входом через второй блок выделения модуля к выходу дифференцирующего фильтра, другим входом к выходу источника напряжения смещения и выходом к другому входу блока деления, а n ≤ m ≤ 2n-1.
Данная САУ предназначена для управления нестационарными объектами с математическим описанием вида
y(n)=k(t)-fu(Y,t), (1)
где Y - вектор состояния, Y=[y, y(1), y(2),...,y(n-1)]T; t - время; u - управляющее воздействие; у(n) - производная n-го порядка выходной величины; fu(Y,t) - нестационарная нелинейная функция, аналитическая относительно своих аргументов; k(t) - нестационарный коэффициент усиления объекта.
Однако эта САУ является излишне сложной и поэтому недостаточно надежной.
Наиболее близким техническим решением (прототипом) является система автоматического управления нестационарным объектом n-го по рядка [2], содержащая объект, который подсоединен входом к выходу усилителя мощности, элемент сравнения, который подключен одним входом через модель-эталон к задатчику, другим входом к выходу объекта и выходом ко входу интегрального регулятора, дифференцирующий фильтр в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен вторым входом к задатчику, выходом ко второму входу каждого из интегросумматоров и ко входу усилителя мощности, первый вход первого интегросумматора подключен к выходу интегрального регулятора, а третий вход каждого из интегросумматоров подсоединен к выходу элемента сравнения.
Эта САУ проще, чем ранее рассмотренная. Однако данная система может не обеспечить заданную динамическую точность при управлении объектами с достаточно широким диапазоном изменения своих параметров, так как имеет недостаточно большие запасы устойчивости. Это объясняется тем, что закон управления этой САУ содержит лишь две составляющие. Одна из них пропорциональна n-й производной сигнала задания g и предназначена для формирования вынужденной составляющей движения системы. Другая составляющая пропорциональна интегралу по отклонению n-й производной выходной величины от ее закона изменения, предписанного заданным уравнением движения системы. Эта составляющая предназначена для отработки как произвольных начальных значений переменных состояния, так и возмущающего воздействия на входе объекта, обусловленного сигналами его собственных обратных связей.
Задача изобретения - повышение динамической точности и увеличение запасов устойчивости системы.
Решение поставленной задачи достигается тем, что система автоматического управления нестационарным объектом n-го порядка, содержащая объект, который подключен входом к выходу усилителя мощности, элемент сравнения, который подсоединен одним входом через модель-эталон к задатчику, другим входом к выходу объекта и выходом ко входу интегрального регулятора, первый дифференцирующий фильтр в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен вторым входом к задатчику и выходом ко второму входу каждого из интегросумматоров, первый вход первого интегросумматора подсоединен к выходу интегрального регулятора и третий вход каждого из интегросумматоров подключен к выходу элемента сравнения, снабжена сумматором, предварительным усилителем и вторым дифференцирующим фильтром в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен вторым входом к выходу объекта, выходом ко входу предварительного усилителя и второму входу каждого из интегросумматоров, суммирующий усилитель первого дифференцирующего фильтра подсоединен выходом к первому входу сумматора и первому входу первого интегросумматора второго дифференцирующего фильтра, а сумматор подключен вторым входом к выходу предварительного усилителя и выходом ко входу усилителя мощности.
На чертеже представлена функциональная схема системы автоматического управления нестационарным объектом.
Система автоматического управления нестационарным объектом n-го порядка содержит объект 1, который подключен входом к выходу усилителя 2 мощности, элемент 3 сравнения, который подсоединен одним входом через модель-эталон 4 к задатчику 5, другим входом к выходу объекта 1 и выходом ко входу интегрального регулятора 6, первый дифференцирующий фильтр 7 в виде последовательно соединенных n интегросумматоров 8/1 - 8/n и суммирующего усилителя 9, который подключен вторым входом к задатчику 5 и выходом ко второму входу каждого из интегросумматоров 8/1 - 8/n, первый вход первого интегросумматора 8/1 подсоединен к выходу интегрального регулятора 6 и третий вход каждого из интегросумматоров 8/1 - 8/n подключен к выходу элемента 3 сравнения, сумматор 10, предварительный усилитель 11 и второй дифференцирующий фильтр 12 в виде последовательно соединенных n интегросумматоров 13/1 - 13/n и суммирующего усилителя 14, который подключен вторым входом к выходу объекта 1, выходом ко входу предварительного усилителя 11 и второму входу каждого из интегросумматоров 13/1- 13/n, суммирующий усилитель 9 первого дифференцирующего фильтра 7 подсоединен выходом к первому входу сумматора 10 и первому входу первого интегросумматора 13/1 второго дифференцирующего фильтра 12, а сумматор 10 подключен вторым входом к выходу предварительного усилителя 11 и выходом ко входу усилителя 2 мощности.
Движение САУ удовлетворяет уравнению
где g - выходной сигнал задатчика; μ - малая постоянная времени, значение которой обратно пропорционально значению граничной частоты требуемой полосы равномерного пропускания модели-эталона;  постоянные коэффициенты, которые подчинены следующим соотношениям:
постоянные коэффициенты, которые подчинены следующим соотношениям:
причем τ0 = 1; k0, kmin - соответственно базовое и минимально возможное из рабочего диапазона значения коэффициента усиления объекта.
При этом вынужденная составляющая движения системы описывается уравнением модели-эталона
(1+μp)ngэ = g, (3)
где gэ - выходной сигнал модели-эталона.
Особенность предложенной САУ заключается в том, что ее движение в соответствии с уравнениями (2) и (3) обеспечивается путем формирования комбинированного закона управления в виде суммы трех составляющих. Одна из них пропорциональна n-Й производной сигнала задания, вторая - интегралу по отклонению n-й производной выходной величины от ее предписанного уравнением (2) закона изменения и третья - косвенно измеренному возмущению n-й производной выходной величины, обусловленному сигналами собственных обратных связей объекта, т.е.

где yn (n) - предписанный уравнением (2) закон изменения n-й производной,
fu - косвенно измеренное возмущение f(Y,t), обусловленное сигналами собственных обратных связей объекта,
ky - коэффициент усиления предварительного усилителя, ky = a1/(a0nμ), причем ai-1 = ∂f(Y,t)/∂y(i-1) (i = 1, 2) при Y = Y0, t = t0.
Система автоматического управления (САУ) нестационарным объектом работает следующим образом.
Сигнал задания с выхода задатчика 5 поступает на вход модели-эталона 4 и второй вход суммирующего усилителя 9 первого дифференцирующего фильтра 7, в котором преобразуется в сигнал, пропорциональный n-й производной сигнала задания g. Далее этот сигнал поступает через сумматор 10 и усилитель 2 мощности на вход объекта 1 и вызывает вынужденное движение последнего.
В то же время выходные сигналы модели-эталона 4 и объекта 1 поступают на входы элемента 3 сравнения, в котором сравниваются между собой. Сигнал рассогласования с выхода элемента 3 сравнения поступает на третий вход каждого интегросумматора 8/1-8/n и через интегральный регулятор 6 на первый вход первого интегросумматора 8/1 первого дифференцирующего фильтра 7, в котором преобразуется в сигнал, пропорциональный интегралу по отклонению n-й производной выходной величины системы от ее предписанного уравнением (2) закона изменения. Указанная составляющая выходного сигнала первого дифференцирующего фильтра 7 поступает далее тоже через сумматор 10 и усилитель 2 мощности на вход объекта 1 и формирует свободную составляющую движения системы, которая обусловлена произвольными начальными значениями переменных состояния.
Однако сигнал fu(Y,t) собственных обратных связей объекта (1), являясь по сути возмущающим воздействием, пытается вызвать отклонение движения САУ от закона (2). Для компенсации этого возмущающего воздействия на второй вход суммирующего усилителя 14 и первый вход первого интегросумматора 13/1 второго дифференцирующего фильтра 12 поступают соответственно выходной сигнал объекта 1 и выходной сигнал первого дифференцирующего фильтра 7. Указанные входные сигналы во втором дифференцирующем фильтре 12 преобразуются в сигнал fu, пропорциональный возмущающему воздействию fu(Y,t). Сигнал fu с выхода второго дифференцирующего фильтра 12 поступает через предварительный усилитель 11, сумматор 10 и усилитель 2 мощности на вход объекта 1. В результате происходит компенсация исходного возмущения fu(Y,t), что эквивалентно компенсации инерционности объекта 1.
Таким образом, за счет введения в систему сумматора, предварительного усилителя и второго дифференцирующего фильтра в ней образуется достаточно быстродействующая дифференциальная компенсирующая инерционность объекта связь. Тем самым достигается повышение динамической точности и увеличение запасов устойчивости системы автоматического управления.
Источники, принятые во внимание заявителем:
1. Патент РФ N 2039371, кл. G 05 В 13/00. - Опубл. 09.07.95. - Бюл. N 19.
2. Елсуков B.C., Загороднюк В.Т. Синтез астатических систем комбинированного управления по старшей производной выходной величины // Изв. вузов Электромеханика, 1998, N 4, с. 96.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| ЭЛЕКТРОПРИВОД С УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2000 |
|
RU2181523C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ ПО ФОРМЕ КРИВОЙ РАЗМАГНИЧИВАНИЯ | 2000 |
|
RU2185635C1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 2000 |
|
RU2191398C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2001 |
|
RU2208794C1 |
| ИМПУЛЬСНЫЙ СТАБИЛИЗАТОР ТОКА | 2001 |
|
RU2194352C1 |
Изобретение относится к области систем управления нестационарными и параметрически неопределенными объектами. Технический результат заключается в повышении динамической точности и увеличении запасов устойчивости системы. Система автоматического управления содержит объект n-го порядка, усилитель мощности, элемент сравнения, модель-эталон, интегральный регулятор, первый и второй дифференцирующие фильтры в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, сумматор и предварительный усилитель. Закон управления системы содержит три составляющие, пропорциональные соответственно n-й производной сигнала задания, косвенно измеренному возмущению n-й производной выходной величины и интегралу по отклонению n-й производной выходной величины от ее закона, предписанного заданным уравнением движения системы. 1 ил.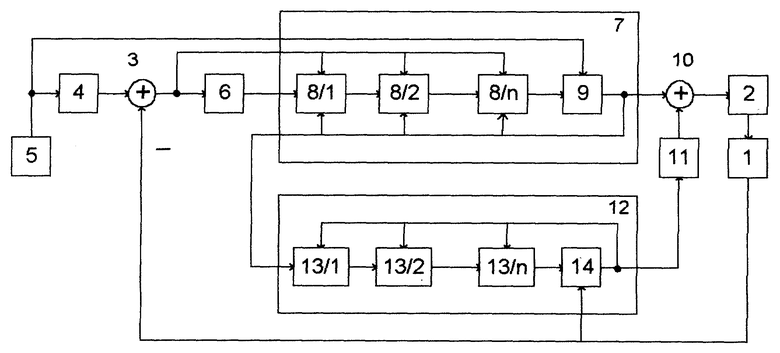
Система автоматического управления нестационарным объектом n-го порядка, содержащая объект, который подключен входом к выходу усилителя мощности, элемент сравнения, который подсоединен одним входом через модель-эталон к задатчику, другим входом к выходу объекта и выходом ко входу интегрального регулятора, первый дифференцирующий фильтр в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен вторым входом к задатчику и выходом ко второму входу каждого из интегросумматоров, первый вход первого интегросумматора подсоединен к выходу интегрального регулятора и третий вход каждого из интегросумматоров подключен к выходу элемента сравнения, отличающаяся тем, что снабжена сумматором, предварительным усилителем и вторым дифференцирующим фильтром в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен вторым входом к выходу объекта, выходом ко входу предварительного усилителя и второму входу каждого из интегросумматоров, суммирующий усилитель первого дифференцирующего фильтра подсоединен выходом к первому входу сумматора и первому входу первого интегросумматора второго дифференцирующего фильтра, а сумматор подключен вторым входом к выходу предварительного усилителя и выходом ко входу усилителя мощности.
| ЕЛСУКОВ В.С | |||
| и др | |||
| Синтез астатических систем комбинированного управления по старшей производной выходной величине | |||
| В: Изв.вузов | |||
| электромеханика, 1998, N 4, с.96 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| US 4679136 A, 07.07.1987. | |||
