Изобретение относится к области автоматики и может быть использовано при проектировании систем автоматического управления нелинейными нестационарными техническими объектами.
Известна система автоматического управления (САУ) нестационарным объектом n-го порядка [патент РФ 2150728, кл. G 05 В 17/00, опубл. 10.06.2000, Бюл. №16], содержащая объект, который подключен входом через усилитель мощности к выходу сумматора, элемент сравнения, который подсоединен одним входом через модель-эталон к задатчику, другим входом к выходу объекта и выходом ко входу интегрального регулятора, два дифференцирующих фильтра в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен выходом ко второму входу каждого из интегросумматоров своего дифференцирующего фильтра, первый дифференцирующий фильтр подсоединен вторым входом к выходу задатчика, первым входом к выходу элемента сравнения, третьим входом к выходу интегрального регулятора и выходом к первому входу сумматора, второй дифференцирующий фильтр подключен вторым входом к выходу объекта, первым входом к выходу первого дифференцирующего фильтра и выходом через предварительный усилитель ко второму входу сумматора, причем вторым входом обоих дифференцирующих фильтров является второй вход суммирующего усилителя, выход которого представляет собой выход соответствующего дифференцирующего фильтра, первым и третьим входами первого дифференцирующего фильтра служат соответственно третий вход всех его интегросумматоров и первый вход его первого интегросумматора, а первым входом второго дифференцирующего фильтра является первый вход его первого интегросумматора.
Однако эта САУ может не обеспечить заданную точность управления такими объектами, диапазон изменения коэффициента усиления которых является достаточно широким. Это объясняется тем, что САУ содержит дифференциальную компенсирующую связь, образованную вторым дифференцирующим фильтром, предварительным усилителем и сумматором. Причем точность компенсации сигналом данной дифференциальной связи эквивалентного сигнала внутренних обратных связей объекта тем выше, чем больше коэффициент усиления предварительного усилителя. Но рассматриваемая дифференциальная связь образует замкнутый контур регулирования, в который входят сумматор, усилитель мощности, объект управления, второй дифференцирующий фильтр и предварительный усилитель. И коэффициент усиления предварительного усилителя не может быть достаточно высоким, так как в любом замкнутом статическом контуре регулирования существует противоречие между его запасами устойчивости и точностью регулирования как в статике, так и в динамике.
Наиболее близким техническим решением (прототипом) является самонастраивающаяся система автоматического управления нестационарным объектом n-го порядка [патент РФ 2039371, кл. G 05 В 13/00, опубл. 09.07.95, Бюл. №19], содержащая объект, который подключен входом к выходу усилителя мощности, элемент сравнения, который подсоединен одним входом через эталонную модель к задатчику и другим входом к выходу объекта, дифференцирующий фильтр в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен выходом ко второму входу каждого из интегросумматоров, блок деления, блок умножения, подсоединенный первым входом к выходу блока деления и выходом ко входу усилителя мощности, три инерционных фильтра, три суммирующих элемента, два блока выделения модуля, источник напряжения смещения и корректирующее устройство в виде последовательно включенных интегратора, m-1 интегросумматоров и суммирующего усилителя, который подключен выходом ко второму входу блока умножения и к третьему входу своих последних n-1 интегросумматоров, вход интегратора и второй вход первых n-1 интегросумматоров корректирующего устройства подсоединены к выходу элемента сравнения, второй вход последних m-n интегросумматоров корректирующего устройства подключены к выходу объекта и четвертый вход n-го интегросумматора корректирующего устройства подсоединен к выходу задатчика, первый суммирующий элемент подключен первым входом через последовательно соединенные первый инерционный фильтр и первый блок выделения модуля к выходу блока умножения, вторым входом к выходу источника напряжения смещения и выходом к первому входу блока деления, второй суммирующий элемент подсоединен вторым входом к выходу источника напряжения смещения и выходом ко второму входу блока деления, третий суммирующий элемент подключен первым входом к выходу задатчика, вторым входом к выходу суммирующего усилителя корректирующего устройства и выходом через второй инерционный фильтр к первому входу дифференцирующего фильтра, который подсоединен вторым входом к выходу объекта, третьим входом через третий инерционный фильтр к выходу объекта и выходом через второй блок выделения модуля к первому входу второго суммирующего элемента, причем первым входом дифференцирующего фильтра является первый вход его первого интегросумматора и выходом - выход его суммирующего усилителя, а вторым и третьим входами дифференцирующего фильтра служат соответственно второй вход его суммирующего усилителя и третий вход всех его интегросумматоров, причем n<m≤2n-1.
В этой САУ коэффициент усиления ее прямой цепи поддерживается контуром самонастройки на единичном значении вне зависимости от величины диапазона изменения коэффициента усиления объекта управления. Но данная самонастраивающаяся система является трехтемповой, так как в ней можно выделить высокочастотную, среднечастотную и низкочастотную части.
Причем быстродействие этой системы определяется темпом процессов ее среднечастотной эталонной модели, который существенно ниже темпа процессов ее высокочастотной части. Поэтому рассматриваемая САУ имеет недостаточно высокое быстродействие и, следовательно, динамическую точность.
Кроме того, точность управления в этой САУ может оказаться недостаточно высокой еще и потому, что она содержит источник напряжения смещения, который снижает точность вычисления значения обратного коэффициента усиления объекта. Источник напряжения смещения включен в данную систему для устранения неопределенного или нулевого результата деления в блоке деления при равенстве нулю одного из его входных сигналов на начальном интервале времени работы САУ при 0<t<nμ.
Задача изобретения - повышение быстродействия и точности самонастраивающейся системы автоматического управления.
Решение поставленной задачи достигается тем, что самонастраивающаяся система автоматического управления нестационарным объектом n-го порядка, содержащая объект, который подключен входом к выходу усилителя мощности, элемент сравнения, который подсоединен одним входом через эталонную модель к задатчику и другим входом к выходу объекта, первый дифференцирующий фильтр в виде последовательно соединенных интегратора, n-1 интегросумматоров и суммирующего усилителя, который подключен выходом ко входу интегратора и второму входу всех своих интегросумматоров и вторым входом к выходу объекта, три суммирующих элемента, три инерционных фильтра, блок умножения, блок деления, подсоединенный первым входом к выходу первого суммирующего элемента и выходом к первому входу блока умножения, снабжена четвертым инерционным фильтром, четвертым суммирующим элементом, блоком регуляторов в виде последовательно соединенных двух интеграторов и суммирующего усилителя, который подключен вторым входом к выходу первого интегратора, и вторым дифференцирующим фильтром в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен выходом ко второму входу каждого из своих интегросумматоров, первый суммирующий элемент подсоединен первым входом к выходу суммирующего усилителя первого дифференцирующего фильтра и вторым входом через первый инерционный фильтр к выходу суммирующего усилителя блока регуляторов, второй суммирующий элемент подсоединен первым входом к выходу второго дифференцирующего фильтра, вторым входом к выходу суммирующего усилителя блока регуляторов и выходом ко второму входу блока умножения, третий суммирующий элемент подключен выходом ко входу усилителя мощности и через второй инерционный фильтр ко второму входу блока деления, первым входом к выходу блока умножения, вторым входом непосредственно и третьим входом через третий инерционный фильтр к выходу второго суммирующего элемента, четвертый суммирующий элемент подсоединен выходом ко входу первого интегратора блока регуляторов, первым входом к выходу суммирующего усилителя первого дифференцирующего фильтра и вторым входом через четвертый инерционный фильтр к выходу второго дифференцирующего фильтра, который подключен первым входом к выходу элемента сравнения и вторым входом к выходу задатчика, причем первым входом второго дифференцирующего фильтра служат первый вход первого и третий вход всех его остальных интегросумматоров, вторым входом и выходом второго дифференцирующего фильтра являются соответственно второй вход и выход его суммирующего усилителя, а эталонная модель выполнена высокочастотной.
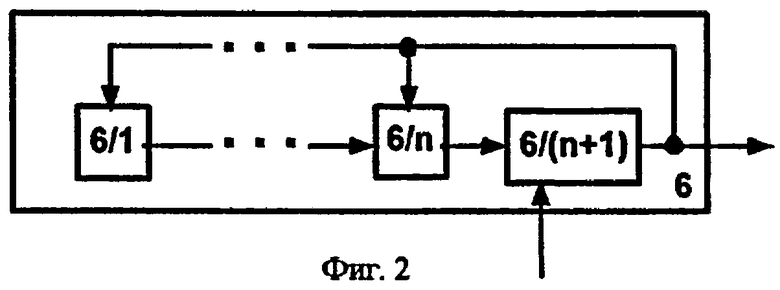
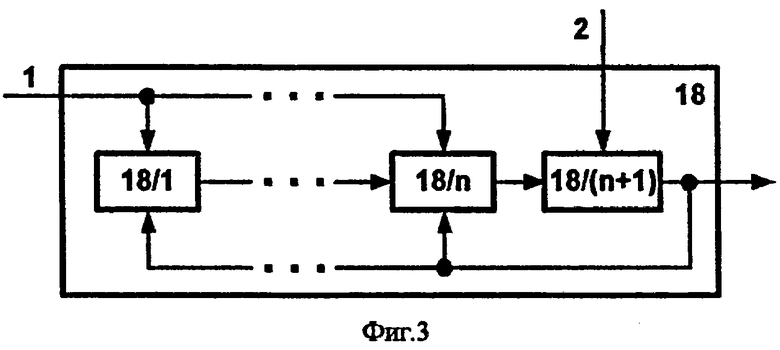
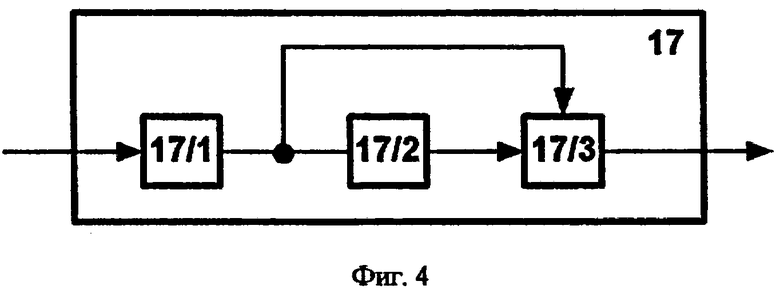
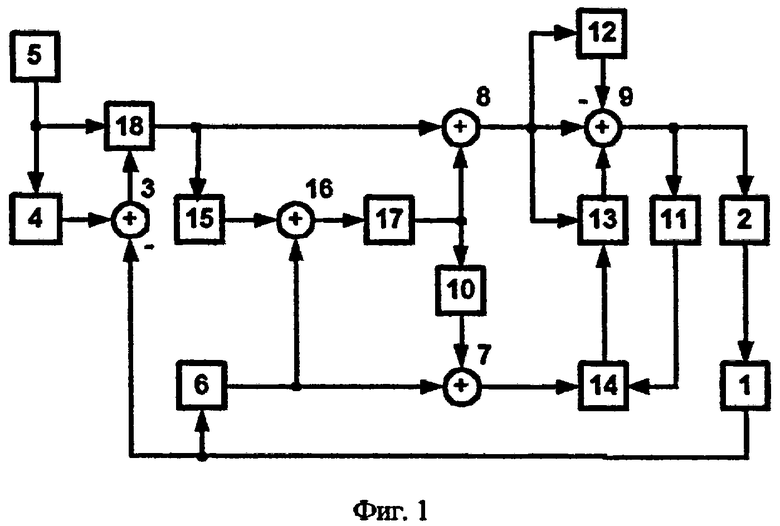
На фиг.1 представлена функциональная схема самонастраивающейся системы автоматического управления нестационарным объектом; на фиг.2 -первого дифференцирующего фильтра; на фиг.3 - второго дифференцирующего фильтра; на фиг.4 - блока регуляторов.
Самонастраивающаяся система автоматического управления нестационарным объектом n-го порядка содержит объект 1, который подключен входом к выходу усилителя 2 мощности, элемент 3 сравнения, который подсоединен одним входом через эталонную модель 4 к задатчику 5 и другим входом к выходу объекта 1, первый дифференцирующий фильтр 6 в виде последовательно соединенных интегратора 6/1, n-1 интегросумматоров 6/2-6/n и суммирующего усилителя 6/(n+1), который подключен выходом ко входу интегратора 6/1 и второму входу всех своих интегросумматоров 6/2-6/n и вторым входом к выходу объекта 1, три суммирующих элемента 7-9, три инерционных фильтра 10-12, блок 13 умножения, блок 14 деления, подсоединенный первым входом к выходу первого суммирующего элемента 7 и выходом к первому входу блока 13 умножения, четвертый инерционный фильтр 15, четвертый суммирующий элемент 16, блок 17 регуляторов в виде последовательно соединенных двух интеграторов 17/1, 17/2 и суммирующего усилителя 17/3, который подключен вторым входом к выходу первого интегратора 17/1, и второй дифференцирующий фильтр 18 в виде последовательно соединенных n интегросумматоров 18/1-18/n и суммирующего усилителя 18/(n+1), который подключен выходом ко второму входу каждого из своих интегросумматоров 18/1-18/n, первый суммирующий элемент 7 подсоединен первым входом к выходу суммирующего усилителя 6/(n+1) первого дифференцирующего фильтра 6 и вторым входом через первый инерционный фильтр 10 к выходу суммирующего усилителя 17/3 блока 17 регуляторов, второй суммирующий элемент 8 подсоединен первым входом к выходу второго дифференцирующего фильтра 18, вторым входом к выходу суммирующего усилителя 17/1 блока 17 регуляторов и выходом ко второму входу блока 13 умножения, третий суммирующий элемент 9 подключен выходом ко входу усилителя 2 мощности и через второй инерционный фильтр 11 ко второму входу блока 14 деления, первым входом к выходу блока 13 умножения, вторым входом непосредственно и третьим входом через третий инерционный фильтр 12 к выходу второго суммирующего элемента 8, четвертый суммирующий элемент 16 подсоединен выходом ко входу первого интегратора 17/1 блока 17 регуляторов, первым входом к выходу суммирующего усилителя 6/(n+1) первого дифференцирующего фильтра 6 и вторым входом через четвертый инерционный фильтр 15 к выходу второго дифференцирующего фильтра 18, который подключен первым входом к выходу элемента 3 сравнения и вторым входом к выходу задатчика 5, причем первым входом второго дифференцирующего фильтра 18 служат первый вход первого 18/1 и третий вход всех его остальных интегросумматоров 18/2-18/n, вторым входом и выходом второго дифференцирующего фильтра 18 являются соответственно второй вход и выход его суммирующего усилителя 18/(n+1), а эталонная модель 4 выполнена высокочастотной.
Математическое описание объекта управления и управляющего устройства самонастраивающейся САУ нестационарным объектом можно представить в виде следующих дифференциальных уравнений:


где Y - вектор состояния,  y(n) - старшая производная выходной величины; u - управляющее воздействие; ϕ0(Y,t), ϕ1(Y,t) - нелинейные нестационарные функции, аналитические относительно своих аргументов; ϕ1 - косвенно измеренное текущее значение возмущения в виде эквивалентного аддитивного сигнала внутренних обратных связей объекта,
y(n) - старшая производная выходной величины; u - управляющее воздействие; ϕ0(Y,t), ϕ1(Y,t) - нелинейные нестационарные функции, аналитические относительно своих аргументов; ϕ1 - косвенно измеренное текущее значение возмущения в виде эквивалентного аддитивного сигнала внутренних обратных связей объекта,

ϕ

p=d/dt;  - предписанный требуемым уравнением движения САУ
- предписанный требуемым уравнением движения САУ
закон изменения старшей производной выходной величины,

yэ - выходной сигнал эталонной модели 4, в уравнении которой

через g обозначен выходной сигнал задатчика 5; μ - малая постоянная времени, значение которой выбирается обратно пропорционально значению граничной частоты требуемой полосы равномерного пропускания эталонной модели 4; σ, τi - постоянные коэффициенты, значения которых определяются из следующих соотношений:
- постоянные коэффициенты, значения которых определяются из следующих соотношений:
Особенность самонастраивающейся САУ нестационарным объектом заключается в том, что в отличие от прототипа она содержит дифференциальную компенсирующую связь. Последняя образуется за счет подключения первого дифференцирующего фильтра 6 входом к выходу объекта 1 и четвертого суммирующего элемента 16 первым входом к выходу суммирующего усилителя 6/(n+1) первого дифференцирующего фильтра 6, вторым входом через четвертый инерционный фильтр 15 к выходу второго дифференцирующего фильтра 18 и выходом через блок 17 регуляторов ко второму входу второго суммирующего элемента 8. К тому же эта компенсирующая связь в отличие от аналога является двукратно интегрирующей. За счет введения в САУ указанной дифференциальной связи осуществляется повышение точности управления при отработке системой аддитивного возмущения на входе объекта. Повышение же точности САУ при отработке ею сигнала задания достигается включением в нее второго дифференцирующего фильтра 18, исключением из нее корректирующего устройства и выполнением эталонной модели 4 высокочастотной.
Кроме того, в данной САУ блок 13 умножения включен в параллельную участку прямой цепи системы ветвь, а не последовательно в прямую цепь системы как в прототипе. За счет этого обеспечивается поступление управляющего воздействия на вход объекта 1 на начальном интервале времени работы системы даже при нулевом значении выходных сигналов блока 14 деления и блока 13 умножения. А это позволяет, в свою очередь, исключить из системы источник напряжения смещения и тем самым еще более повысить точность управления.
Самонастраивающаяся система автоматического управления нестационарным объектом работает следующим образом.
Сигнал задания с выхода задатчика 5 поступает на второй вход второго дифференцирующего фильтра 18 и через эталонную модель 4 на один из входов элемента 3 сравнения, на другой вход которого поступает выходной сигнал объекта 1. Сигнал рассогласования с выхода элемента 3 сравнения поступает на первый вход второго дифференцирующего фильтра 18. В дифференцирующем фильтре 18 его входные сигналы преобразуются в сигнал, пропорциональный предписанному уравнением (5) закону изменения (6) старшей производной выходной величины объекта 1. Далее этот сигнал с выхода второго дифференцирующего фильтра 18 поступает через второй и третий суммирующие элементы 8 и 9 и усилитель 2 мощности на вход объекта 1 и приводит его в движение.
В то же время выходной сигнал второго дифференцирующего фильтра 18 поступает через четвертый инерционный фильтр 15 на второй вход четвертого суммирующего элемента 16, на второй вход которого поступает с выхода объекта 1 через первый дифференцирующий фильтр 6 сигнал, пропорциональный старшей производной выходной величины объекта 1. Причем четвертый инерционный фильтр 15 включен в систему для обеспечения синфазности входных сигналов четвертого суммирующего элемента 16.
Сигнал рассогласования с выхода четвертого суммирующего элемента 16 поступает на вход блока 17 регуляторов, в котором преобразуется в сигнал, пропорциональный аддитивному возмущению ϕ1(Y,t) на входе объекта 1. С выхода блока 17 регуляторов этот сигнал поступает через второй и третий суммирующие элементы 8 и 9 на вход второго инерционного фильтра 11 и через первый инерционный фильтр 10 на второй вход первого суммирующего элемента 7, на первый вход которого поступает выходной сигнал суммирующего усилителя 6/(n+1) первого дифференцирующего фильтра 6. В первом суммирующем элементе 7 его входные сигналы суммируются и суммарный сигнал с его выхода, пропорциональный сумме истинного значения старшей производной выходной величины и аддитивного возмущения ϕ1(Y,t) объекта 1, поступает на первый вход блока 14 деления. На второй вход блока 14 деления поступает с выхода второго инерционного фильтра 11 сигнал, пропорциональный сумме требуемого значения старшей производной выходной величины и того же аддитивного возмущения. В результате преобразования входных сигналов в блоке 14 деления образуется сигнал, пропорциональный обратному значению коэффициента усиления объекта 1.
Выходной сигнал блока 14 деления поступает на первый вход блока 13 умножения, на второй вход которого поступает выходной сигнал второго суммирующего элемента 8. В результате преобразования входных сигналов в блоке 13 умножения на его выходе образуется сигнал, пропорциональный произведению обратного коэффициента усиления объекта 1 и суммы требуемого значения старшей производной выходной величины и аддитивного возмущения на входе объекта 1. Выходной сигнал блока 13 умножения поступает на первый вход третьего суммирующего элемента 9, на второй вход которого непосредственно, а на третий вход через третий инерционный фильтр 12 поступает выходной сигнал второго суммирующего элемента 8.
Заметим, что первый, второй и третий инерционные фильтры 10-12 включены в систему для обеспечения синфазности их выходных сигналов и выходного сигнала блока 13 умножения. Благодаря инерционности этих фильтров 10-12 на начальном интервале времени работы САУ при 0<t<nμ выходной сигнал третьего суммирующего элемента 9 практически равен выходному сигналу второго суммирующего элемента 8. Но с течением времени после начала работы САУ в третьем суммирующем элементе 9 его входные сигналы, поступающие с выходов второго суммирующего элемента 8 и третьего инерционного фильтра 12, начинают постепенно компенсировать друг друга. И одновременно начинается рост входного сигнала, поступающего на первый вход третьего суммирующего элемента 9 с выхода блока 13 умножения. В результате по истечении определенного момента времени t>nμ на выходе третьего суммирующего элемента 9 образуется сигнал, пропорциональный произведению обратного коэффициента усиления объекта 1 и суммы требуемого значения старшей производной выходной величины и аддативного возмущения на входе объекта 1. Выходной сигнал третьего суммирующего элемента 9 через усилитель 2 мощности поступает на вход объекта 1 и управляет его движением в соответствии с уравнением (5). А после момента времени t>3τ1, когда САУ отработает ненулевые начальные условия своих переменных состояния, выходные сигналы элемента 3 сравнения и четвертого суммирующего элемента 16 станут равными нулю, движение САУ будет удовлетворять уравнению (7) эталонной модели 4.
Таким образом, за счет включения в самонастраивающуюся САУ нестационарным объектом четвертого инерционного фильтра, четвертого суммирующего элемента, блока регуляторов, второго дифференцирующего фильтра, изменения взаимосвязей между ее блоками и выполнения эталонной модели высокочастотной достигается повышение быстродействия и точности системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| ЭЛЕКТРОПРИВОД С КООРДИНАТНО-ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2004 |
|
RU2261522C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
Изобретение относится к области автоматики и может быть использовано при проектировании систем автоматического управления нелинейными нестационарными техническими объектами. Техническим результатом является повышение быстродействия и точности самонастраивающейся системы автоматического управления. Устройство содержит объект управления, усилитель мощности, элемент сравнения, эталонную модель, задатчик, два дифференцирующих фильтра, четыре суммирующих элемента, четыре инерционных фильтра, блок умножения, блок деления, блок регуляторов. 4 ил.
Самонастраивающаяся система автоматического управления нестационарным объектом n-го порядка, содержащая объект, который подключен входом к выходу усилителя мощности, элемент сравнения, который подсоединен одним входом через эталонную модель к задатчику и другим входом к выходу объекта, первый дифференцирующий фильтр в виде последовательно соединенных интегратора, n-1 интегросумматоров и суммирующего усилителя, который подключен выходом ко входу интегратора и второму входу всех своих интегросумматоров и вторым входом к выходу объекта, три суммирующих элемента, три инерционных фильтра, блок умножения, блок деления, подсоединенный первым входом к выходу первого суммирующего элемента и выходом к первому входу блока умножения, отличающаяся тем, что снабжена четвертым инерционным фильтром, четвертым суммирующим элементом, блоком регуляторов в виде последовательно соединенных двух интеграторов и суммирующего усилителя, который подключен вторым входом к выходу первого интегратора, и вторым дифференцирующим фильтром в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, который подключен выходом ко второму входу каждого из своих интегросумматоров, первый суммирующий элемент подсоединен первым входом к выходу суммирующего усилителя первого дифференцирующего фильтра и вторым входом через первый инерционный фильтр к выходу суммирующего усилителя блока регуляторов, второй суммирующий элемент подсоединен первым входом к выходу второго дифференцирующего фильтра, вторым входом к выходу суммирующего усилителя блока регуляторов и выходом ко второму входу блока умножения, третий суммирующий элемент подключен выходом ко входу усилителя мощности и через второй инерционный фильтр ко второму входу блока деления, первым входом к выходу блока умножения, вторым входом непосредственно и третьим входом через третий инерционный фильтр к выходу второго суммирующего элемента, четвертый суммирующий элемент подсоединен выходом ко входу первого интегратора блока регуляторов, первым входом к выходу суммирующего усилителя первого дифференцирующего фильтра и вторым входом через четвертый инерционный фильтр к выходу второго дифференцирующего фильтра, который подключен первым входом к выходу элемента сравнения и вторым входом к выходу задатчика, причем первым входом второго дифференцирующего фильтра служат первый вход первого и третий вход всех его остальных интегросумматоров, вторым входом и выходом второго дифференцирующего фильтра являются соответственно второй вход и выход его суммирующего усилителя, а эталонная модель выполнена высокочастотной.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1998 |
|
RU2130635C1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| Самонастраивающаяся система управления с эталонной моделью | 1990 |
|
SU1827664A1 |
| US 4675804 А, 23.06.1987 | |||
| DE 3239015 А1, 26.04.1984 | |||
| DE 4329759 А1, 09.03.1995. | |||

