Изобретение относится к области автоматики и может быть использовано при проектировании систем автоматического управления (САУ) объектами с нестабильными параметрами.
Известна одноканальная система автоматического управления нестационарным объектом n-го порядка [Л.М.Бойчук, В.С.Елсуков. Синтез интегральных законов управления нестационарными объектами /Киев: Автоматика, 1988, N 5, с.72], содержащая элемент сравнения, подключенный одним входом к задатчику, другим входом к выходу объекта и выходом через корректирующее устройство ко входу объекта, причем корректирующее устройство выполнено в виде последовательно соединенных интегрального регулятора, m-1 интегросумматоров и суммирующего усилителя, выход которого подсоединен к одному из входов последних n-1 интегросумматоров, другой вход всех интегросумматоров и второй вход суммирующего усилителя подключены к выходу элемента сравнения, а m ≥ 2n-1.
Эта САУ предназначена для управления такими объектами, в качестве переменных состояния которых могут быть выбраны фазовые координаты, т.е. выходная величина объекта и ее производные до n-1 порядка включительно. Но даже при управлении такими объектами данная система не гарантирует достаточно высокую динамическую точность. Это объясняется тем, что в САУ применен принцип управления по отклонению старшей производной выходной величины. Следовательно, отклонение указанной производной, а значит и отклонение выходной величины от их эталонных законов изменения всегда будет иметь место.
Кроме того, данная САУ тем более не может обеспечить высокую динамическую точность при управлении объектами, выходная величина которых зависит от суммы m+1 переменных состояния, m < n,
где x - вектор состояния, x= [x1, x2,...xn]Т; u - управляющее воздействие; k(t) - непрерывная функция времени t; f(x, t) - непрерывная нелинейная функция, аналитическая относительно переменных состояния; bi-1 постоянные коэффициенты; y - выходная величина.
постоянные коэффициенты; y - выходная величина.
Из уравнений (1), в частности, видно, что переменными состояния рассматриваемых объектов не могут являться фазовые координаты.
Наиболее близким аналогом (прототипом) к предлагаемому техническому решению является одноканальная система автоматического управления нестационарным объектом n-го порядка [В.С.Елсуков, В.Т.Загороднюк. Синтез астатических систем комбинированного управления по старшей производной выходной величины /Изв. вузов. Электромеханика, 1998, N 4, с. 96], содержащая объект, подсоединенный входом к выходу усилителя мощности, элемент сравнения, подключенный одним входом через эталонную модель к задатчику и другим входом к выходу объекта, последовательно включенные интегральный регулятор и дифференцирующий фильтр в виде последовательно соединенных n интегросумматоров и суммирующего усилителя, причем вход интегрального регулятора и второй вход каждого интегросумматора подсоединены к выходу элемента сравнения, а третий вход всех интегросумматоров и вход усилителя мощности подключены к выходу суммирующего усилителя, второй вход которого подсоединен к задатчику.
Данная система комбинированного управления по старшей производной выходной величины может обеспечить более высокую динамическую точность, чем ранее рассмотренная САУ. Но только при управлении такими объектами, в качестве переменных состояния которых могут быть выбраны фазовые координаты. Она, как и предыдущая система, не может гарантировать достаточно высокую динамическую точность при управлении объектами (1), выходная величина которых зависит от суммы переменных состояния.
Задача изобретения - повышение динамической точности системы автоматического управления нестационарным объектом n-го порядка, выходная величина которого зависит от суммы m+1 переменных состояния, причем n>m>1.
Решение поставленной задачи достигается тем, что система автоматического управления нестационарным объектом n-го порядка, содержащая объект, подключенный входом к выходу усилителя мощности, задатчик, элемент сравнения, подсоединенный первым входом к выходу первой эталонной модели и выходом через интегральный регулятор к первому входу первого дифференцирующего фильтра, выполнена двухканальной и снабжена второй эталонной моделью, двумя преобразователями сигнала в двухкомпонентный вектор, вторым дифференцирующим фильтром, предварительным усилителем и сумматором, подключенным выходом ко входу усилителя мощности, причем первый преобразователь сигнала в двухкомпонентный вектор подсоединен входом к задатчику и первым выходом ко входу первой эталонной модели, первый дифференцирующий фильтр снабжен четвертым входом и подключен к первым входам сумматора и второго дифференцирующего фильтра выходом и ко второму выходу первого преобразователя сигнала в двухкомпонентный вектор вторым входом непосредственно и третьим входом через вторую эталонную модель, а второй преобразователь сигнала в двухкомпонентный вектор подсоединен входом к выходу объекта, первым выходом ко второму входу элемента сравнения и вторым выходом к четвертому входу первого дифференцирующего фильтра и ко второму входу второго дифференцирующего фильтра, который подключен выходом через предварительный усилитель ко второму входу сумматора.
При этом каждый дифференцирующий фильтр выполнен в виде последовательно соединенных l=n-m интегросумматоров и суммирующего усилителя, подключенного выходом ко второму входу всех интегросумматоров, причем первым и вторым входами обоих дифференцирующих фильтров являются соответственно первый вход первого интегросумматора и второй вход суммирующего усилителя, выход которого представляет собой выход соответствующего дифференцирующего фильтра, а третьим и четвертым входами первого дифференцирующего фильтра служат соответственно третий и четвертый входы всех его интегросумматоров.
На фиг. 1 представлена функциональная схема двухканальной САУ нестационарным объектом, на фиг. 2 - дифференцирующих фильтров, на фиг. 3 - преобразователей сигнала в двухкомпонентный вектор.
Двухканальная САУ нестационарным объектом n-го порядка содержит объект 1, подключенный входом к выходу усилителя 2 мощности, задатчик 3, элемент 4 сравнения, подсоединенный первым входом к выходу первой эталонной модели 5 и выходом через интегральный регулятор 6 к первому входу первого дифференцирующего фильтра 7, вторую эталонную модель 8, два преобразователя 9 и 10 сигнала в двухкомпонентный вектор, второй дифференцирующий фильтр 11, предварительный усилитель 12 и сумматор 13, подключенный выходом ко входу усилителя 2 мощности, причем первый преобразователь 9 сигнала в двухкомпонентный вектор подсоединен входом к задатчику 3 и первым выходом ко входу первой эталонной модели 5, первый дифференцирующий фильтр 7 снабжен четвертым входом и подключен к первым входам сумматора 13 и второго дифференцирующего фильтра 11 выходом и ко второму выходу первого преобразователя 9 сигнала в двухкомпонентный вектор вторым входом непосредственно и третьим входом через вторую эталонную модель 8, а второй преобразователь 10 сигнала в двухкомпонентный вектор подсоединен входом к выходу объекта 1, первым выходом ко второму входу элемента 4 сравнения и вторым выходом к четвертому входу первого дифференцирующего фильтра 7 и ко второму входу второго дифференцирующего фильтра 11, который подключен выходом через предварительный усилитель 12 ко второму входу сумматора 13.
Каждый дифференцирующий фильтр 7 и 11 выполнен в виде последовательно соединенных l= n-m интегросумматоров 14/l-14/l и суммирующего усилителя 15, подключенного выходом ко второму входу всех интегросумматоров 14/l-14/l, причем первым и вторым входами обоих дифференцирующих фильтров 7 и 11 являются соответственно первый вход первого интегросумматора 14/l и второй вход суммирующего усилителя 15, выход которого представляет собой выход соответствующего дифференцирующего фильтра 7 (11), а третьим и четвертым входами первого дифференцирующего фильтра 7 служат соответственно третий и четвертый входы всех его интегросумматоров 14/l-14/l.
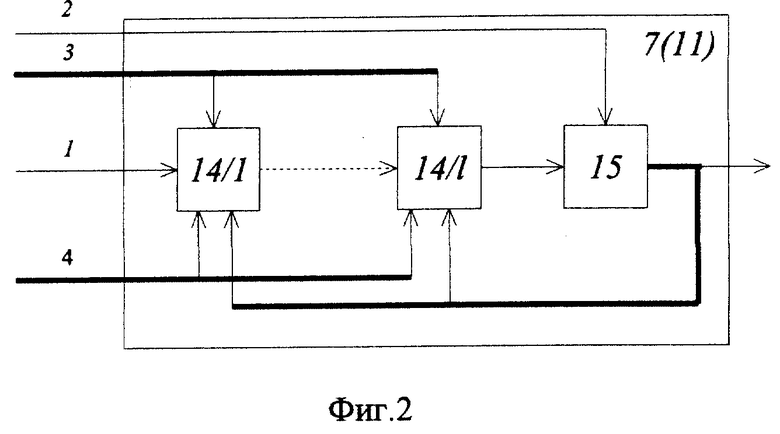
Каждый преобразователь 9 и 10 сигнала в двухкомпонентный вектор выполнен согласно известному техническому решению [Стрейц В. Метод пространства состояний в теории дискретных линейных систем управления. -М.: Наука, 1985, с. 19, рис. 3.7] в виде последовательно соединенных первого суммирующего усилителя 16, m интеграторов 17/l-17/m и второго суммирующего усилителя 18, который подключен остальными m входами к выходам первых m-1 интеграторов 17/l-17/(m-1) и первого суммирующего усилителя 16, подсоединенного m входами к выходам всех интеграторов 17/l - 17/m, причем выход второго суммирующего усилителя 18 является первым выходом преобразователя 9(10) сигнала в двухкомпонентный вектор, входом которого служит (m+1)-й вход первого суммирующего усилителя 16, а выход того же усилителя 16 представляет собой второй выход преобразователя 9(10) сигнала в двухкомпонентный вектор.
Закон управления двухканальной САУ нестационарным объектом описывается следующим уравнением
где gп (n), yп (n) - производные n-го порядка, преобразованные с помощью преобразователей 9 и 10 сигнала заданного g и текущего y значений выходной величины; gп=W(p)g, yп=W(p)у, причем
kо - значение коэффициента передачи объекта (1) в стационарной точке его номинального режима работы; yпт (n) - требуемый закон изменения производной n-го порядка преобразованной выходной величины, который должен удовлетворять требуемому уравнению движения системы
т.е. 
причем yпэ - выходная величина первой эталонной модели, которая подчинена уравнению вынужденного движения САУ
(1+μp)n-myпэ= gп; (4)
fи - сигнал дифференциальной компенсирующей связи, пропорциональный косвенно измеренному с помощью второго дифференцирующего фильтра 11 возмущению f(x, t), обусловленному действием собственных обратных связей объекта (1),
kпу - коэффициент усиления предварительного усилителя,
μ - постоянная времени, значение которой обратно пропорционально граничной частоте требуемой полосы равномерного пропускания эталонных моделей; 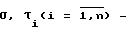 постоянные коэффициенты, которые подчинены следующим соотношениям:
постоянные коэффициенты, которые подчинены следующим соотношениям: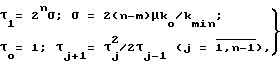
причем kmin - минимально возможное из рабочего диапазона изменения значение коэффициента передачи объекта.
Из выражения (2) следует, что управляющее воздействие в предложенной двухканальной САУ нестационарным объектом в отличие от прототипа содержит три составляющие. Причем одна составляющая формируется каналом управления по отклонению, две другие составляющие - каналом управления по возмущению.
Первый канал управления по возмущению предназначен для формирования вынужденной составляющей указанной производной. Он содержит последовательно включенные задатчик, первый преобразователь сигнала в двухкомпонентный вектор, первый дифференцирующий фильтр, сумматор и усилитель мощности, подключенный ко входу объекта, причем второй вход сумматора подсоединен через последовательно соединенные второй дифференцирующий фильтр и предварительный усилитель к выходу первого дифференцирующего фильтра, а второй вход второго дифференцирующего фильтра подключен через второй преобразователь сигнала в двухкомпонентный вектор к выходу объекта.
Второй канал управления по отклонению предназначен для формирования свободной составляющей старшей производной выходной величины. Он содержит помимо задатчика и первого преобразователя сигнала в двухкомпонентный вектор две эталонные модели и замкнутый контур регулирования, который включает в себя элемент сравнения, интегральный регулятор, первый дифференцирующий фильтр, сумматор, усилитель мощности, объект и второй преобразователь сигнала в двухкомпонентный вектор, причем элемент сравнения подключен одним входом к первому выходу второго преобразователя сигнала в двухкомпонентный вектор и другим входом через первую эталонную модель к первому выходу первого преобразователя сигнала в двухкомпонентный вектор, а второй выход того же преобразователя сигнала подсоединен через вторую эталонную модель к третьему входу первого дифференцирующего фильтра.
Двухканальная система автоматического управления нестационарным объектом работает следующим образом.
Сигнал задания g с выхода задатчика 3 поступает на вход первого преобразователя 9 сигнала, в котором преобразуется в двухкомпонентный вектор преобразованных сигналов задания g и, соответственно, выходной величины y. Выходная величина объекта 1 y поступает на вход второго преобразователя 10 сигнала, в котором преобразуется в двухкомпонентный вектор преобразованных выходных сигналов yп (m) и yc= yп+τ1y
и, соответственно, выходной величины y. Выходная величина объекта 1 y поступает на вход второго преобразователя 10 сигнала, в котором преобразуется в двухкомпонентный вектор преобразованных выходных сигналов yп (m) и yc= yп+τ1y
Сигнал yп (m) со второго выхода второго преобразователя 10 сигнала в двухкомпонентный вектор поступает на второй вход второго дифференцирующего фильтра 11, в котором преобразуется в сигнал n-й производной преобразованной выходной величины yп (n), пропорциональный значению производной  .
.
В это же время сигнал gп (n) с выхода первого дифференцирующего фильтра 7 поступает на первый вход второго дифференцирующего фильтра 11, в котором преобразуется в сигнал, синфазный с сигналом yп (n), и алгебраически складывается с последним. Результирующий сигнал рассогласования, пропорциональный возмущению f(x, t) объекта (1), с выхода второго дифференцирующего фильтра 11 поступает на вход предварительного усилителя 12, в котором усиливается. Выходной сигнал предварительного усилителя 12 поступает через сумматор 13 и усилитель 2 мощности на вход объекта 1 и компенсирует указанное возмущение. И если начальные значения переменных состояния системы были нулевыми, то ее движение будет соответствовать уравнению (4). В этом случае работает только первый канал управления двухканальной САУ нестационарным объектом, так как выходной сигнал элемента 4 сравнения будет равен нулю.
Второй какал управления системы вступает в работу тогда, когда начальные значения переменных состояния не являются нулевыми или когда осуществляемая первым каналом управления компенсация является не совсем полной. В частности, из-за конечного значения коэффициента усиления предварительного усилителя 12. В этом случае сигнал gс с первого выхода первого преобразователя 9 сигнала в двухкомпонентный вектор поступает на вход первой эталонной модели 5, а сигнал gп (m) со второго выхода того же преобразователя 9 сигнала - на вход второй эталонной модели 8. Выходной сигнал первой эталонной модели 5 поступает на первый вход элемента 4 сравнения, в котором сравнивается с сигналом, поступающим на его второй вход с первого выхода второго преобразователя 10 сигнала в двухкомпонентный вектор.
Полученный сигнал рассогласования с выхода элемента 4 сравнения поступает на вход интегрального регулятора 6, в котором интегрируется, а затем подается на первый вход первого дифференцирующего фильтра 7. На третий и четвертый входы того же фильтра 7 поступают сигналы соответственно с выхода второй эталонной модели 8 и со второго выхода второго преобразователя 10 сигнала в двухкомпонентный вектор. Указанные сигналы в первом дифференцирующем фильтре 7 сравниваются между собой, а полученный сигнал рассогласования вместе с другими сигналами, поступающими на первый вход с выхода интегрального регулятора 6 и на второй вход со второго выхода первого преобразователя 9 сигнала в двухкомпонентный вектор, преобразуются в требуемый сигнал производной n-го порядка преобразованной выходной величины. Этот сигнал с выхода первого дифференцирующего фильтра 7 через сумматор 13 и усилитель 2 мощности поступает на вход объекта 1 и заставляет его двигаться по закону (3).
Таким образом, благодаря введению в двухканальную САУ нестационарным объектом n-го порядка дополнительных элементов и изменения структуры дифференцирующих фильтров, обеспечивается повышение динамической точности при управлении объектами, выходная величина которых зависит от суммы m+1 переменных состояния, причем n>m>1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1999 |
|
RU2150728C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
| ЭЛЕКТРОПРИВОД С УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2000 |
|
RU2181523C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| УСТРОЙСТВО ДЛЯ КЛАССИФИКАЦИИ ФЕРРОМАГНИТНЫХ МАТЕРИАЛОВ ПО ФОРМЕ КРИВОЙ РАЗМАГНИЧИВАНИЯ | 2000 |
|
RU2185635C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 2001 |
|
RU2194286C1 |
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ В ТОК | 2000 |
|
RU2181924C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2001 |
|
RU2208794C1 |
Изобретение относится к области автоматики и может быть использовано при проектировании систем автоматического управления с нестабильными параметрами. Технический результат заключается в повышении динамической точности. Система содержит интегральный регулятор, сумматор, два дифференцирующих фильтра, усилитель мощности, предварительный усилитель, задатчик, элемент сравнения, две эталонные модели, два преобразователя сигнала в двухкомпонентный вектор. 1 з.п. ф-лы, 3 ил.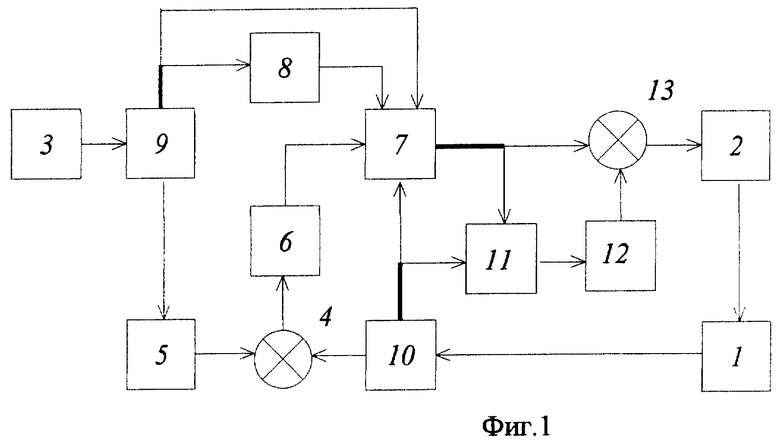
| ЕЛСУКОВ B.C | |||
| и др | |||
| Синтез астатических систем комбинированного управления по старшей производной выходной величины | |||
| Изв | |||
| вузов | |||
| Электромеханика, 1998, № 4, с.96 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| Система автоматического управления нестационарным объектом | 1990 |
|
SU1756861A1 |
| US 4679136 A, 07.07.1987 | |||
| БОЙЧУК Л.М | |||
| и др | |||
| Синтез интегральных законов управления нестационарными объектами, Ж | |||
| "Автоматика" | |||
| Киев, 1988, №5, с.72. | |||
