Предлагаемое изобретение относится к области измерительной техники и может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических системах управления.
Известно устройство, реализующее способ определения положения объекта (Смирнов Б.М. Магнитометрический метод определения углового положения объекта. - М. : Измерительная техника. 1996. N 12. С. 34-37). Известное устройство состоит из двух катушек индуктивности с взаимно ортогональными осями, генератора напряжений разных частот, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, а третий и четвертый выходы - к выводам второй катушки индуктивности, двух трехкомпонентных датчиков, шести усилителей переменных напряжений, вход каждого из которых подключен к соответствующему выходу одного из трехкомпонентных датчиков, и двенадцати преобразовательных блоков. Параллельно соединенные первые входы первого и седьмого, второго и восьмого, третьего и девятого, пятого и одиннадцатого, шестого и двенадцатого преобразовательных блоков подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого усилителей переменных напряжений. Вторые входы первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков подключены к пятому, а вторые входы седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков подключены к шестому выходу генератора напряжений разных частот. При этом обе катушки индуктивности размещены на объекте.
Известное устройство работает следующим образом. Генератор напряжений разных частот создает переменные напряжения с частотами f1, f2, одно из которых подается на первую катушку индуктивности, а второе напряжение подается на вторую катушку индуктивности. Токи, протекающие в катушках индуктивности, создают магнитные поля с соответствующими частотами f1 и f2. Магнитные поля индуктируют три переменные ЭДС в каждом из трехкомпонентных датчиков, пропорциональные составляющим векторов магнитной индукции. Эти ЭДС усиливаются усилителями переменных напряжений, которые одновременно выполняют роль согласующих узлов между датчиками и преобразовательными блоками. Каждый преобразовательный блок состоит из полосового фильтра и синхронного детектора. Полосовые фильтры первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков настроены на переменные напряжения с частотой f1, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f1 с пятого выхода генератора напряжений разных частот. Полосовые фильтры седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков настроены на переменное напряжение с частотой f2, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f2 с шестого выхода генератора напряжений разных частот. В результате этого преобразовательные блоки выделяют сигналы, пропорциональные составляющим векторов магнитной индукции, созданной катушками индуктивности в местах размещения датчиков. Синхронное детектирование обеспечивает измерение сигналов пропорционально изменению их амплитуд и фаз. По измеренным в двух точках пространства значениям составляющих векторов магнитной индукции и взаимному расположению трехкомпонентных датчиков определяют координаты катушек индуктивности, а значит и координаты объекта, и векторы дипольных магнитных моментов этих катушек, например, по алгоритму, изложенному в работе (Смирнов Б.М. Метод определения координат и магнитного момента дипольного источника поля. - М.: Измерительная техника. 1988. N 9. С. 40-42). Определение углового положения объекта осуществляется по направляющим косинусам векторов дипольных магнитных моментов катушек индуктивности, каждая из которых связана с объектом. Направления векторов магнитных моментов катушек индуктивности жестко связаны с осями этих катушек (Чернышев Е.Т., Чечурина Е.Н., Чернышева Н.Г., Студенцов Н.В. Магнитные измерения. - М.: Изд-во Комитета стандартов и измерительных приборов. 1969), поэтому направляющие косинусы векторов магнитных моментов определяют и угловое положение этих катушек, а значит и объекта.
В известном устройстве оси катушек индуктивности должны быть взаимно ортогональны. Неортогональность же осей катушек индуктивности свидетельствует об неортогональности векторов дипольных магнитных моментов этих катушек, что приводит к погрешности определения положения объекта, в частности, углового положения объекта, а следовательно, и к снижению точности определения положения объекта. Выполнить катушки индуктивности с неортогональностью осей даже 10-20 угловых минут сложно, так как неортогональность уже образцовых мер магнитной индукции на частотах долей единиц и единиц герц составляет несколько угловых минут, а на частотах десятки килогерц и выше значительно возрастает.
Известно устройство для определения положения объекта (Пат. РФ N 2103664, 1998. Бюл. N 3, второй вариант), которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из трех трехкомпонентных магниточувствительных датчиков, двадцати семи усилительно-преобразовательных блоков, генератора напряжений разных частот, трех катушек индуктивности с взаимно ортогональными осями, выполненных в виде трехкомпонентного источника переменных магнитных полей и объекта, на котором размещены упомянутые катушки индуктивности. Первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу первого датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу первого датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу первого датчика, первые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к первому выходу второго датчика, первые входы тринадцатого, четырнадцатого и пятнадцатого усилительно-преобразовательных блоков подключены к второму выходу второго датчика, первые входы шестнадцатого, семнадцатого и восемнадцатого усилительно-преобразовательных блоков подключены к третьему выходу второго датчика, первые входы девятнадцатого, двадцатого и двадцать первого усилительно-преобразовательных блоков подключены к первому выходу третьего датчика, первые входы двадцать второго, двадцать третьего и двадцать четвертого усилительно-преобразовательных блоков подключены к второму выходу третьего датчика, первые входы двадцать пятого, двадцать шестого и двадцать седьмого усилительно-преобразовательных блоков подключены к третьему выходу третьего датчика. Первый выход генератора напряжений разных частот подключен к вторым входам первого, четвертого, седьмого, десятого, тринадцатого, шестнадцатого, девятнадцатого, двадцать второго и двадцать пятого усилительно-преобразовательных блоков, второй выход подключен к вторым входам второго, пятого, восьмого, одиннадцатого, четырнадцатого, семнадцатого, двадцатого, двадцать третьего и двадцать шестого усилительно-преобразовательных блоков, третий выход подключен к вторым входам третьего, шестого, девятого, двенадцатого, пятнадцатого, восемнадцатого, двадцать первого, двадцать четвертого и двадцать седьмого усилительно-преобразовательных блоков, четвертый и пятый выходы подключены к выводам первой катушки индуктивности, шестой и седьмой выходы подключены к выводам второй катушки индуктивности, а восьмой и девятый выходы подключены к выводам третьей катушки индуктивности.
Известное устройство для определения положения объекта (Пат. РФ N 2103664, 1998. Бюл. N 3) работает следующим образом. В катушках индуктивности, подключенных к генератору, протекают токи разных частот f1, f2, f3. В результате этого катушки индуктивности воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трех трехкомпонентных датчиках (например, в пассивных индукционных датчиках) по каждой из трех магниточувствительных осей соответствующего датчика индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной тремя катушками индуктивности с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются усилительно-преобразовательными блоками, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы усилительно-преобразовательных блоков подаются опорные напряжения с соответствующими частотами f1, f2, f3 с генератора напряжений разных частот, а на первые входы этих блоков подаются с соответствующих выходов трехкомпонентных датчиков переменные ЭДС. В результате этого на выходах усилительно-преобразовательных блоков будут сигналы соответствующих полярностей, пропорциональные амплитудам проекций векторов магнитной индукции, например, на оси одной и той же системы координат. По сигналам с выходов усилительно-преобразовательных блоков, пропорциональных составляющим векторов магнитной индукции в местах размещения трехкомпонентных датчиков, определяют положение объекта (координаты и угловое положение объекта) по алгоритму, изложенному в работе (Смирнов Б.М. Определение координат и углового положения объекта при наличии и отсутствии контакта с ним. - М.: Измерительная техника. 1998. N 2. С. 30-34).
В известном устройстве оси трех катушек индуктивности должны быть взаимно ортогональны, а следовательно, и дипольные магнитные моменты этих катушек, по которым определяют угловое положение объекта, тоже должны быть взаимно ортогональны. Неортогональность осей катушек индуктивности в устройстве, принятом за прототип, также как и в устройстве, принятом за аналог, приводит к погрешности определения положения объекта, а следовательно, и к снижению точности определения положения объекта. Кроме того, известное устройство отличается сложностью конструкции, в состав которого входят три трехкомпонентных датчика, двадцать семь усилительно-преобразовательных блоков и генератор напряжений разных частот.
Задачей предлагаемого изобретения является создание устройства для определения положения объекта, отличающегося от прототипа простотой конструкции и исключением погрешности определения объекта от неортогональности осей катушек индуктивности, воспроизводящих переменные магнитные поля. Поставленная задача определения положения объекта решается за счет размещения трех катушек индуктивности в вершинах прямоугольного треугольника, применения двух трехкомпонентных магниточувствительных датчиков, восемнадцати усилительно-преобразовательных блоков, генератора напряжений разных частот и вычислительного блока, обеспечивающего определение положения объекта, как и в прототипе, в реальном масштабе времени.
Предлагаемое устройство для определения положения объекта, включающее два трехкомпонентных магниточувствительных датчика, восемнадцать усилительно-преобразовательных блоков, первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу первого датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу первого датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу первого датчика, первые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к первому выходу второго датчика, первые входы тринадцатого, четырнадцатого и пятнадцатого усилительно-преобразовательных блоков подключены к второму выходу второго датчика, первые входы шестнадцатого, семнадцатого и восемнадцатого усилительно-преобразовательных блоков подключены к третьему выходу второго датчика, генератора напряжений разных частот, первый выход которого подключен к вторым входам первого, четвертого, седьмого, десятого, тринадцатого и шестнадцатого усилительно-преобразовательных блоков, второй выход подключен к вторым входам второго, пятого, восьмого, одиннадцатого, четырнадцатого и семнадцатого усилительно-преобразовательных блоков, а третий выход подключен к вторым входам третьего, шестого, девятого, двенадцатого, пятнадцатого и восемнадцатого усилительно-преобразовательных блоков, три катушки индуктивности, размещенные на объекте, выводы одной из которых подключены к четвертому и пятому выходам генератора напряжений разных частот, выводы второй катушки индуктивности - к шестому и седьмому выходам генератора напряжений разных частот, выводы третьей катушки индуктивности - к восьмому и девятому выходам генератора напряжений разных частот, снабжено вычислительным блоком, входы которого подключены к соответствующим выходам усилительно-преобразовательных блоков, при этом катушки индуктивности размещены в вершинах прямоугольного треугольника.
Применение в предлагаемом техническом решении двух трехкомпонентных датчиков, восемнадцати усилительно-преобразовательных блоков, трех катушек индуктивности, размещенных на объекте в вершинах прямоугольного треугольника, генератора напряжений разных частот и вычислительного блока, включенных между собой соответствующим образом, обеспечивает определение положения объекта, в частности, определение координат и углового положения объекта в выбранной системе координат, например, в декартовой системе координат, в которой известны направления осей чувствительности датчиков. При этом в предлагаемом устройстве по сравнению с аналогом и прототипом исключена погрешность определения положения объекта при неортогональности осей катушек индуктивности, что повышает точность определения положения объекта. Кроме того, в предлагаемом устройстве по сравнению с прототипом исключены один трехкомпонентный датчик и девять усилительно-преобразовательных блоков, что упрощает конструкцию предлагаемого устройства.
Таким образом, технический результат предлагаемого устройства выражается в упрощении конструкции устройства и исключении погрешности определения положения объекта от неортогональности осей катушек индуктивности, воспроизводящих переменные магнитные поля.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На чертеже изображена структурная схема устройства для определения положения объекта.
Предлагаемое устройство для определения положения объекта (см. чертеж) состоит из двух трехкомпонентных магниточувствительных датчиков 1 и 2, у которых оси чувствительности, например, коллинеарны осям декартовой системы координат OXYZ, восемнадцати усилительно-преобразовательных блоков 3-20, генератора напряжений разных частот 21, трех катушек индуктивности 22-24, размещенных на объекте 25 в вершинах прямоугольного треугольника, в частности, катушка 22 размещена на оси O'X', катушка 23 - на оси O'Y' и катушка 24 - в начале декартовой системы координат O'X'Y'Z', и вычислительного блока 26. Первый выход датчика 1 подключен к первым входам блоков 3-5, второй выход датчика 1 подключен к первым входам блоков 6-8, третий выход датчика 1 подключен к первым входам блоков 9-11, первый выход датчика 2 подключен к первым входам блоков 12-14, второй выход датчика 2 подключен к первым входам блоков 15-17, третий выход датчика 2 подключен к первым входам блоков 18-20, вторые входы блоков 3, 6, 9, 12, 15, 18 подключены к первому выходу генератора 21, вторые входы блоков 4, 7, 10, 13, 16, 19 подключены к второму выходу генератора 21, вторые входы блоков 5, 8, 11, 14, 17, 20 подключены к третьему выходу генератора 21, выводы катушки 22 подключены к четвертому и пятому выходам генератора 21, выводы катушки 23 подключены к шестому и седьмому выходам генератора 21, выводы катушки 24 подключены к восьмому и девятому выходам генератора 21, а выходы A1 - A18 блоков 3-20 подключены к соответствующим входам блока 26.
Предлагаемое устройство для определения положения объекта работает следующим образом. В катушках 22-24 (см. чертеж), подключенных к генератору 21, протекают токи разных частот f1, f2, f3. В результате этого катушки индуктивности 22-24 воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентных датчиках 1 и 2 (например, в пассивных индукционных датчиках) по каждой из трех магниточувствительных осей соответствующего датчика индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 22-24, с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются блоками 3-20, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 3-20 подаются опорные напряжения с соответствующими частотами f1, f2, f3 c генератора 21, а на первые входы этих блоков подаются с соответствующих выходов датчиков 1 и 2 переменные ЭДС. В результате этого на выходах A1 - A18 блоков 3-20 будут сигналы соответствующих полярностей, пропорциональные амплитудам проекций векторов магнитной индукции, например, на оси OX, OY, OZ системы координат OXYZ.
Переменные магнитные поля в местах размещения датчиков 1-2 (см. чертеж) можно принять за магнитные поля диполей, созданные катушками 22-24, если геометрические размеры катушек 22-24 и датчиков 1 и 2 существенно меньше расстояний между этими катушками и датчиками. В таком случае по сигналам с выходов блоков 3-20 осуществляется определение в блоке 26 координат (x1,y1, z1) катушки 22, координат (x2, y2, z2) катушки 23 и координат (x3, y3, z3) катушки 24, например, по алгоритму, изложенному в работе (Смирнов Б.М. Метод определения координат и магнитного момента дипольного источника поля. - М.: Измерительная техника. 1988. N 9. С. 40-42). Катушки 22-24, являющиеся дипольными источниками переменных магнитных полей, размещены на объекте 26 в вершинах прямоугольного треугольника, в частности, катушка 22 размещена на оси O'X', катушка 23 - на оси O'Y' и катушка 24 - в начале декартовой системы координат O'X'Y'Z'. Зная координаты источников переменных магнитных полей (катушек 22-24) и их размещение в системе координат O'X'Y'Z' (по частотам), определяют в блоке 26 направляющие косинусы l1, m1, n1 оси O'X' направляющие косинусы l2, m2, n2 оси O'Y' и направляющие косинусы l3, m3, n3 оси O'Z' в системе координат OXYZ из следующих уравнений (Лаптев Г.Ф. Элементы векторного исчисления. М.: "Наука". 1975. 335 с.):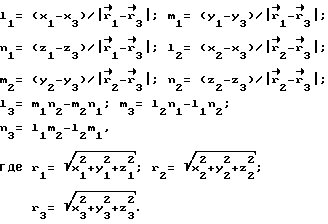
Оси системы координат O'X'Y'Z' жестко связаны с объектом 26 (см. чертеж), поэтому их ориентационное положение в системе координат OXYZ определяет и угловое положение объекта 26 в системе координат OXYZ. Таким образом, по измеренным датчиками 1 и 2 проекций векторов магнитной индукции на оси системы координат OXYZ, созданных тремя дипольными источниками переменных магнитных полей (катушками 22-24), размещенными в вершинах прямоугольного треугольника, в частности, образованного осями координат O'X', O'Y' (катеты) и гипотенузой, соединяющей катушки 22 и 23, определяют положение объекта 26 (координаты и угловое положение) при отсутствии информации об ориентации осей катушек 22-24 и их магнитных моментов. Следовательно, определение положения объекта 26 не зависит от ориентации осей катушек 22-24. Это повышает точность определения положения объекта по сравнению с техническими решениями, принятыми за аналог и прототип. При этом направляющие косинусы осей OX, OY, OZ системы координат OXYZ (см. чертеж) в системе координат объекта O'X'Y'Z' будут иметь соответствующие значения (l1, l2, l3), (m1, m2, m3), (n1, n2, n3), то есть, если считать объект неподвижным относительно системы координат OXYZ, то определяют угловое положение датчиков относительно объекта. Кроме того, предлагаемое техническое решение имеет более простую конструкцию по сравнению с прототипом. По сравнению с прототипом в предлагаемом техническом решении исключены один трехкомпонентный датчик и девять усилительно-преобразовательных блоков. Наличие вычислительного блока 26 в предлагаемом техническом решении обеспечивает определение положения объекта, как и в прототипе, в реальном масштабе времени.
В предлагаемом устройстве катушки индуктивности могут быть выполнены в виде мер магнитного момента, а трехкомпонентные пассивные датчики могут быть реализованы из пассивных однокомпонентных индукционных датчиков (Чернышев Е. Т. , Чечурина Е.Н., Чернышева Н.Г., Студенцов Н.В. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов. 1969, С. 41-42, 59-62). Усилительно-преобразовательные блоки, каждый из которых состоит из избирательного усилителя и синхронного детектора, могут быть выполнены аналогично, как и в магнитометре (Афанасьев Ю.В. Феррозондовые приборы. Л.: "Энергоатомиздат". 1986. С. 117, 132, 135, 137). Генератор напряжений разных частот может быть выполнен по схеме, приведенной в работе (Гуткин B.С. Применение операционных усилителей в измерительной технике. Л.: "Энергия". 1975, С. 67). Вычислительным блоком может служить преобразователь измерительный многоканальный (ПИМ-1, сертификат N 15660-96, Госстандарт России).
Изобретение относится к измерительной технике и может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических системах управления. Устройство для определения положения объекта, содержащее два трехкомпонентных магниточувствительных датчика, восемнадцать усилительно-преобразовательных блоков, генератор напряжений разных частот, вычислительный блок и три катушки индуктивности, размещенные на объекте в вершинах прямоугольного треугольника, включенные между собой соответствующим образом, обеспечивает определение положения объекта. Технический результат - упрощение и повышение точности. 1 ил.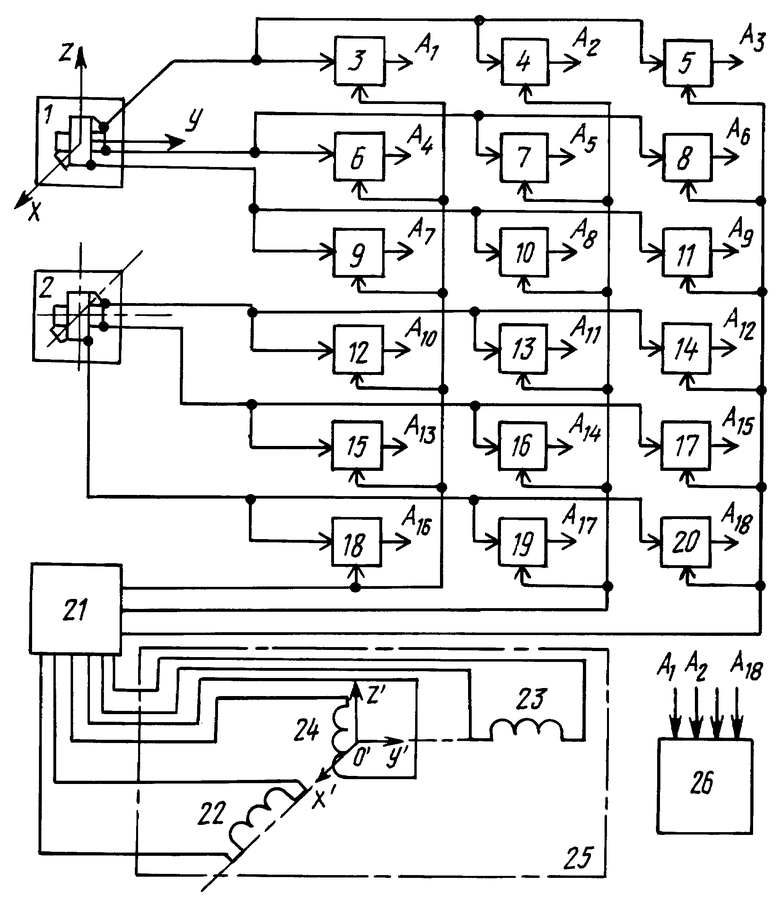
Устройство для определения положения объекта, включающее два трехкомпонентных магниточувствительных датчика, восемнадцать усилительно-преобразовательных блоков, первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу первого датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу первого датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу первого датчика, первые входы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к первому выходу второго датчика, первые входы тринадцатого, четырнадцатого и пятнадцатого усилительно-преобразовательных блоков подключены к второму выходу второго датчика, первые входы шестнадцатого, семнадцатого и восемнадцатого усилительно-преобразовательных блоков подключены к третьему выходу второго датчика, генератор напряжений разных частот, первый выход которого подключен к вторым входам первого, четвертого, седьмого, десятого, тринадцатого и шестнадцатого усилительно-преобразовательных блоков, второй выход подключен к вторым входам второго, пятого, восьмого, одиннадцатого, четырнадцатого и семнадцатого усилительно-преобразовательных блоков, а третий выход подключен к вторым входам третьего, шестого, девятого, двенадцатого, пятнадцатого и восемнадцатого усилительно-преобразовательных блоков, три катушки индуктивности, размещенные на объекте, выводы одной из которых подключены к четвертому и пятому выходам генератора напряжений разных частот, выводы второй катушки индуктивности - к шестому и седьмому выходам генератора напряжений разных частот, выводы третьей катушки индуктивности - к восьмому и девятому выходам генератора напряжений разных частот, отличающееся тем, что оно снабжено вычислительным блоком, входы которого подключены к соответствующим выходам усилительно-преобразовательных блоков, при этом катушки индуктивности размещены в вершинах прямоугольного треугольника.
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНЫХ ПАРАМЕТРОВ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 1989 |
|
RU2075759C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2119171C1 |
| US 3435335 A, 25.03.1969. | |||

