Настоящее изобретение относится к системе давления щеток, а в более узком смысле относится к машинам для чистки или подметания пола, в которых вращающиеся щетки используются, например, для мытья щеткой и/или подметания, и/или полирования поверхности пола.
Известные машины для чистки пола используют вращающиеся щетки для мытья или полирования пола. Щетки устанавливаются на колесной раме, управление которой осуществляется рядом идущим водителем, а если имеются в виду более крупные по габаритам машины, то их управление осуществляется находящимся на машине водителем. Давление на щетки для чистки или подметания обеспечивается весом головок щеток и блоками двигателей в сочетании с весом баков для воды. И, тем не менее, на всех известных машинах можно использовать какое-то одно фиксированное давление, в этих машинах нет возможности выбора различных давлений в зависимости от конкретных целей чистки или подметания пола или в зависимости от конкретного типа пола. Хотя на уже известных машинах, управляемых рядом идущим оператором, можно добиться давления максимально в 200 фунтов (примерно 90 кг), однако этого может оказаться явно недостаточно для жесткого режима чистки сильно загрязненных полов, к тому же для поддержания нормальной чистоты часто требуются более высокие давления. С другой стороны, в случае приложения на щетки высокого давления происходит очень быстрый износ самих щеток. Используемый в упомянутых машинах тип щеток отличается очень высокой стоимостью и слишком интенсивным износом. В любом случае чрезмерно длительное высокое давление щеток может привести к повреждению каких-то конкретных поверхностей пола. С другой стороны, если давление щеток будет слишком небольшим, тогда машина для чистки пола окажется просто не способной очистить сильно загрязненные полы. Кроме того, из-за быстрого износа щеток неизбежно уменьшается давление самого процесса чистки, а следовательно, эффект от такой чистки будет явно неудовлетворительным.
Последние модели машин с управлением рядом идущим водителем характеризуются попыткой их создателей компенсировать быстрый износ щеток посредством введения в головки щеток небольших пружин с целью уменьшения интенсивности износа щеток. Однако вскоре стало ясно, что подобное решение проблемы неприемлемо и ненадежно во многих конкретных ситуациях только по той причине, что пружины имеют тенденцию "не замечать" шероховатые поверхности, а именно такие поверхности являются причиной повреждения приводных двигателей.
В любом случае в уже известных машинах максимальное давление ограничено, и в них нет средств и возможностей для регулирования давления, которое щетки оказывают на поверхность пола.
Более того, с помощью известных машин невозможно обрабатывать неровные поверхности, при этом машины имеют тенденцию выходить из строя или работать с малым эффектом, если предназначенная для обработки поверхность пола не является ровной и плоской.
Наиболее близкой к предложенной машине для чистки или подметания пола является машина для чистки или подметания пола, содержащая раму, блок щеток, установленный на раме, средство для перемещения блока щеток в направлении к и от подлежащей чистке поверхности, средство смещения, действующее между рамой и блоком щеток для приложения к блоку щеток заданного усилия смещения в направлении к поверхности, причем средство смещения оперативно установлено между рамой и блоком щеток для действия в качестве подвески для блока щеток и для понуждения блока щеток действовать в качестве плавающего блока так, что усилие смещения может быть приложено через плавающий блок щеток (см. заявку ЕПВ 0173394, кл. A 47 L 11/30, 1986).
Поскольку в известной машине используемое давление зависит от веса какой-либо части машины, например баков с водой и т.д., то возникают проблемы с их практическим использованием, и ими трудно маневрировать, что практически исключает возможность использования таких машин женщинами, поскольку требуется приложение значительной физической силы.
Техническим результатом, на который направлено данное изобретение, является создание машины для чистки или подметания пола, в которой отсутствуют упомянутые выше недостатки уже известных подобных машин.
Данный технический результат достигается за счет того, что машина для чистки и подметания пола, содержащая раму, блок щеток, установленный на раме, средство для перемещения блока щеток в направлении к и от подлежащей чистке поверхности, средство смещения, действующее между рамой и блоком щеток для приложения к блоку щеток заданного усилия смещения в направлении к поверхности, причем средство смещения оперативно установлено между рамой и блоком щеток для действия в качестве подвески для блока щеток и для понуждения блока щеток действовать в качестве плавающего блока так, что усилие смещения может быть приложено через плавающий блок щеток, согласно изобретению дополнительно содержит средство датчика для непосредственного измерения прилагаемого рабочего давления, прилагаемого через плавающий блок щеток, средство визуального воспроизведения измеренного рабочего давления, средство для ввода оператором заданного рабочего давления для блока щеток и средство сравнения для сравнения входного давления оператора и измеренного давления и для генерирования сигнала управления в ответ на разность между заданным давлением и измеренным давлением и средство для подачи сигнала управления к средству приложения давления, а также за счет того, что средство смещения содержит исполнительный механизм, снабженный первым элементом и вторым элементом с возможностью их удлинения от исполнительного механизма на выбираемое расстояние, причем блок щеток соединен со вторым элементом, и за счет того, что средство смещения содержит втулку, прикрепленную ко второму элементу, шток, внутренний конец которого может скользить внутрь втулки, при этом шток выступает за пределы втулки и соединен с блоком щеток, а пружина внутри втулки сцеплена с внутренним концом штока, а также за счет того, что средство визуального воспроизведения приспособлено для визуального воспроизведения цифрового значения приложенного давления.
Данный технический результат достигается за счет того, что средство датчика для непосредственного измерения прилагаемого рабочего давления содержит тензодатчик или датчик давления, или пьезоэлектрический датчик, и за счет того, что содержит кулисный переключатель, имеющий позицию увеличения давления щетки, вторую противоположную позицию уменьшения давления, а также средство смещения кулисного переключателя в промежуточную позицию "выключено", и, кроме того, за счет того, что содержит средство обратной связи, выполненное с возможностью регулирования прикладываемого давления щетки в функции измеренного давления с целью поддержания приложенного давления, которое по существу находится в пределах заданных граничных значений, и за счет того, что средство сравнения содержит электронный процессор, а также за счет того, что содержит средство для управления давлением головки щетки, включающее аналого-цифровой преобразователь входных сигналов, представляющих соответственно измеренное давление щетки и выбранное оператором давление щетки, запоминающее средство заданных параметров системы, вычислительное средство, запрограммированное на сравнение двух входных сигналов и на генерирование сигнала управления в ответ на результат сравнения и заданные параметры системы, средство для приема сигнала управления давлением головки щетки, за счет того, что она содержит средство считывания состояния источника электропитания машины для чистки или подметания пола и средство генерирования сигнала на прекращение работы щеток, если мощность аккумуляторной батареи падает ниже предварительно установленного значения, а также за счет того, что она содержит запоминающее средство для фиксирования общей продолжительности использования источника питания и генерирования сигнала на прекращение работы щеток, если суммарная продолжительность использования превышает заранее установленное значение, и, кроме того, за счет того, что содержит средство для исключения возможности выполнения оператором каких-либо изменений вo введенном давлении щеток в процессе, когда машина для чистки и подметания пола пересекает предназначенную для чистки и подметания пола пересекает предназначенную для чистки поверхность.
Таким образом, по одному из аспектов настоящего изобретения предусмотрено создание машины для чистки или подметания пола, которая содержит
- раму,
- блок щеток, установленных на раме,
- средства для перемещения щеточного блока к и от предназначенной для чистки поверхности и
- упругие средства смещения, установленные так, чтобы они действовали в качестве средства подвески между рамой и щеточным блоком.
По предпочтительным вариантам изобретения давление блока щеток можно изменять посредством регулирования средства смещения, например посредством регулирования натяжения пружинного средства или давления в стойке для газа либо объема жидкости в гидравлической или пневматической системе. Для регулирования натяжения можно использовать соответствующий исполнительный механизм, например исполнительный механизм для сжатия пружинного средства, чем сильнее сжимается пружина, тем больше давление щеток на поверхность пола, и становится более эффективным сам процесс чистки. Является предпочтительным использовать в качестве исполнительного механизма силовой цилиндр с электрическим приводом, хотя для этой цели можно использовать силовые цилиндры с гидравлическим приводом и даже с ручным приводом.
Степень смещения, например натяжение пружины, а следовательно, и давления можно устанавливать в заводских условиях в процессе изготовления машины для чистки или подметания пола или же в процессе эксплуатации машины инженером-специалистом по эксплуатации в зависимости от конкретных целей выполнения операции чистки или подметания поверхности пола. По наиболее предпочтительному варианту изобретения давление может регулировать сам оператор на месте в зависимости от конкретной задачи. Для выполнения легкого режима чистки или полирования предпочтительно использовать небольшое давление, что сведет к минимуму износ щеток, если же предстоит тяжелый режим работы, т.е. если предстоит чистка сильно загрязненной поверхности, тогда необходимо будет использовать более высокое давление. По предпочтительному варианту изобретения предусмотрено снабжение машин средствами для ввода и визуального воспроизведения желаемого давления самим оператором, а также для регулирования прикладываемого давления.
По еще одному предпочтительному варианту первого аспекта настоящего изобретения по меньшей мере одна пружина устанавливается в трубке для пружины, которая приводится в действие исполнительным механизмом, режим работы которого регулируется, например, с помощью двухпозиционного кулисного переключателя, расположенного на пульте управления машиной. Этот кулисный переключатель будет, например, смещаться в промежуточную позицию "выключено" и затем устанавливаться в одной позиции, чтобы повысить давление, а затем в другой позиции, чтобы уменьшить давление. Освобождение этого переключателя будет возвращать его в нейтральную позицию или в позицию "выключено" (OFF), в результате чего прекращается движение исполнительного механизма.
Является предпочтительным использовать две пружины, каждая из которых устанавливается в своей трубке для пружины, причем обе пружины приводятся в действие общим исполнительным механизмом, режим работы которого регулируется упомянутым кулисным переключателем.
По второму аспекту изобретения предусмотрено создание машины для чистки или подметания, которая содержит
- раму,
- блок щеток, установленный на раме и предназначенный для движения к и от предназначенной для чистки щеткой поверхности,
- смещающее средство, действующее между рамой и блоком щеток и предназначенное для смещения щеточного блока по направлению к поверхности,
- средство для измерения давления, которое оказывает блок щеток на поверхность,
- средство визуального воспроизведения измеренного давления.
Давление щетки измеряется либо посредством механического измерения силы сжатия пружин, либо с помощью тензометрического датчика, датчика давления или пьезоэлектрического датчика. Затем измеренное давление можно визуально воспроизвести на пульте управления для информирования оператора.
По другому варианту изобретения для регулирования давления щетки используется обратная связь, например усилие сжатия пружины в виде функции либо измеренного давления, чтобы поддерживать прикладываемое давление, чтобы поддерживать прикладываемое давление по существу на постоянном уровне или по меньшей мере в установленных пределах, либо требуемого давления, которое устанавливает сам оператор.
По другому аспекту изобретения предусматривается создание машины для чистки или подметания, которая содержит
- раму,
- блок щеток, установленный на раме,
- средства для перемещения блока щеток к и от предназначенной для чистки поверхности,
- средство смещения, действующее между рамой и щеточным блоком и предназначенное для смещения с возможностью выбора щеточного блока по направлению к поверхности,
- средство датчика для непосредственного измерения прикладываемого рабочего давления,
- средство для ввода оператором желаемого рабочего давления для щеточного блока.
Является предпочтительным, чтобы машина содержала средство сравнения для сравнения вводимого оператором давления с измеренным давлением и для образования сигнала управления в ответ на различия между желаемым давлением и измеренным давлением, а также средство для подачи сигнала управления в средство приложения давления.
Средство сравнения можно использовать в машинах для чистки пола с одной головкой щетки или с большим количеством головок щеток, обычно с двумя головками щеток, или с многими головками щеток с подачей соответствующего сигнала сразу ко всем головкам или индивидуально к каждой головке блока щеток.
Машины для чистки и подметания обычно используют круглые или эллиптические формы щеток, установленных так, чтобы они вращались в плоскости, в общем параллельной полу. Все щетины щеток устанавливаются обычно перпендикулярно предназначенной для чистки или подметания поверхности пола. И, тем не менее, было установлено, что система давления щеток по настоящему изобретению в одинаковой степени применима в машине для чистки или подметания с цилиндрической головкой щетки и с щетиной щеток, установленной радиально, а сама головка щетки вращается вокруг оси, параллельной предназначенной для чистки или подметания поверхности. В данном случае будет предпочтительным устанавливать машину по настоящему изобретению так, чтобы давление в равной степени подавалось на каждый конец вала цилиндрической головки.
По одному предпочтительному варианту изобретения, который особенно пригоден для машины с управлением рядом идущим оператором, смещающее средство содержит по меньшей мере одну с большим усилием сжатия пружину длиной как минимум 3 дюйма (7,2 см), а предпочтительнее длиной 6 дюймов (14,4 см), а еще лучше длиной от 12 до 15 дюймов (от 28,8 до 36 см) (хотя пружины могут иметь и большую длину). Вполне понятно, что требуемая длина пружины зависит от многих факторов, включая, например, тип машины (для машины с находящимся на ней оператором потребуются более длинные пружины), калибр пружины (предназначенные для выполнения тяжелого режима работы пружины должны иметь большую длину, чем пружины, предназначенные для выполнения менее тяжелого режима работы, чтобы обеспечить требуемые характеристики подвески для компенсирования неровной поверхности), требуемую мощность чистки или подметания и относительные позиции исполнительного механизма и трубок для пружин. Можно использовать одиночную пружину или альтернативно две или более пружин, которые в итоге составляют требуемую длину и которые можно устанавливать в трубке для пружин. Можно также использовать работающую на кручение пружину.
Чтобы свести к минимуму вариации в давлении щеток, которые обычно возникают в результате износа самих щеток или обработки неровных поверхностей пола, рекомендуется, чтобы смещающее средство содержало относительно слабую пружину, например работающую на кручение пружину. Является также предпочтительным, чтобы давление возникало в результате движения относительно слабой пружины и чтобы сигнал управления от исполнительного механизма подавался на другой конец пружины.
Альтернативно пригодное относительно слабое пружинное средство может содержать стойку для газа, хотя предпочтительно также механическое преимущество с возможностью регулирования для образования эффективного средства управления.
Давление щеток можно также изменять посредством смены используемых пружин, хотя очевидно, что сделать это оператору в процессе эксплуатации машин будет довольно трудно, обычно эту операцию выполняет инженер-специалист по техобслуживанию или другое подобное лицо.
Система чистки или подметания, включающая устройство по настоящему изобретению, имеет ряд существенных преимуществ перед уже известными системами. С ее помощью можно добиться высоких давлений щеток, что дает возможность чистить сильно загрязненные поверхности пола. С помощью подобных систем можно добиться также небольшого давления щеток, что дает возможность осуществлять "легкую" чистку с помощью одной и той же машины, если и когда в этом есть необходимость, а следовательно, сводится к минимуму ненужный износ щеток и устраняется вероятность повреждения пола или поверхностей, предназначенных для чистки, что часто происходит при использовании уже известных систем с их недостаточно эффективной регулировкой давления. Устройство по настоящему изобретению предусматривает использование подвески для машины для чистки или подметания, которая допускает плавающий режим работы чистящей или подметающей головки и гарантирует отличное выполнение своих функций машиной при обработке грубых или неровных поверхностей без сбоя нормального ритма работы.
Машина для чистки или подметания, включающая в себя устройство по изобретению, отличается простотой и легкостью ее использования и регулирования режима ее работы так, что ею может управлять даже относительно слабый по своим физическим данным оператор, к тому же машина обеспечивает более эффективную чистку или подметание по сравнению с возможностями уже известных машин с управлением рядом идущим оператором.
По еще одному аспекту настоящего изобретения предусмотрена система регулирования режима работы машины для чистки или подметания, причем эта система содержит средство для приложения любого одного из широкого диапазона рабочих давлений на блок чистящей или подметающей щетки в самой машине для чистки или подметания, средство для мониторинга и/или измерения прилагаемого рабочего давления и средство для визуального воспроизведения индикации измеренного рабочего давления. Является предпочтительным использовать в качестве визуально воспроизводящего индикации устройства цифровой светодиодный (LED) или жидкокристаллический (LCD) индикатор. Если используемый для регулирования рабочего давления исполнительный механизм имеет гидравлический, пневматический или ручной привод, тогда сигнал об индикации давления можно получить от непосредственно механической связи, например от кабеля Боудана (Bowden) или от вращающегося приводного соединения.
По предпочтительному варианту еще одного аспекта изобретения предусмотрено образование системы, содержащей средство ввода для оператора для установки желаемого рабочего давления и компараторное средство для сравнения вводимого оператором давления с измеренным давлением и для генерирования сигнала управления в ответ на различие между желаемым давлением и измеренным давлением, а также средство для подачи сигнала управления в средство приложения давления.
Эта система дает возможность оператору регулировать давление головки щетки и тем самым возможность регулировать чистящую способность машины и интенсивность износа щеток.
Является предпочтительным использовать в качестве компараторного средства электронный процессор. Средство измерения давления может регистрировать давление с помощью электронного резистивного элемента и визуально воспроизводить измеренное значение давления на пульте управления оператора.
Является предпочтительным измерять образуемое головкой щетки давление щетки непосредственным образом, например посредством измерения вращающего момента непосредственно на головке щетки, чтобы можно было поддерживать постоянное давление щетки, а давление можно будет считывать по манометру, воспроизводящему давление на пульте управления (на специальном индикаторе) оператора.
По варианту еще одного аспекта настоящего изобретения предусмотрено создание системы регулирования давления головки щетки для машины по чистке или подметанию, причем упомянутая система содержит средство аналого-цифрового преобразования входных сигналов, представляющих соответственно измеренное давление головки щетки и выбранное оператором давление головки щетки, запоминающее средство для хранения заданных параметров системы и вычислительное средство, запрограммированное на сравнение двух входных сигналов и на генерирование сигнала управления в ответ на упомянутое сравнение, принимая во внимание заданные параметры системы.
Является предпочтительным, чтобы сигнал измеренного давления усиливался перед моментом его преобразования в цифровой сигнал.
По предпочтительному варианту предусмотрено использование средств для считывания состояния источника питания, например батареи или портативного батарейного источника питания, и для генерирования сигнала на прекращение работы щеток, когда состояние источника питания будет ниже заданного значения. Кроме того, для записи общей продолжительности использования источника питания и для генерирования сигнала на прекращение работы щеток, если установленная продолжительность использования превышает заданное значение, можно предусмотреть и использовать аккумулирующее средство.
По одному из вариантов изобретения система управления предназначена для запрещения измерений давления щеток в процессе движения машины для чистки пола.
Машину для чистки или подметания по изобретению можно использовать для чистки или подметания любой поверхности, например полов, мостовых, тротуаров, дорог и даже негоризонтальных поверхностей, например наклонных плоскостей или стен.
Чтобы лучше понять суть изобретения и проиллюстрировать пути его реализации, нижеследующее описание будет сопровождаться ссылками на чертежи, на которых:
фиг. 1 - поперечный вертикальный разрез блока щеток для машины для чистки по изобретению;
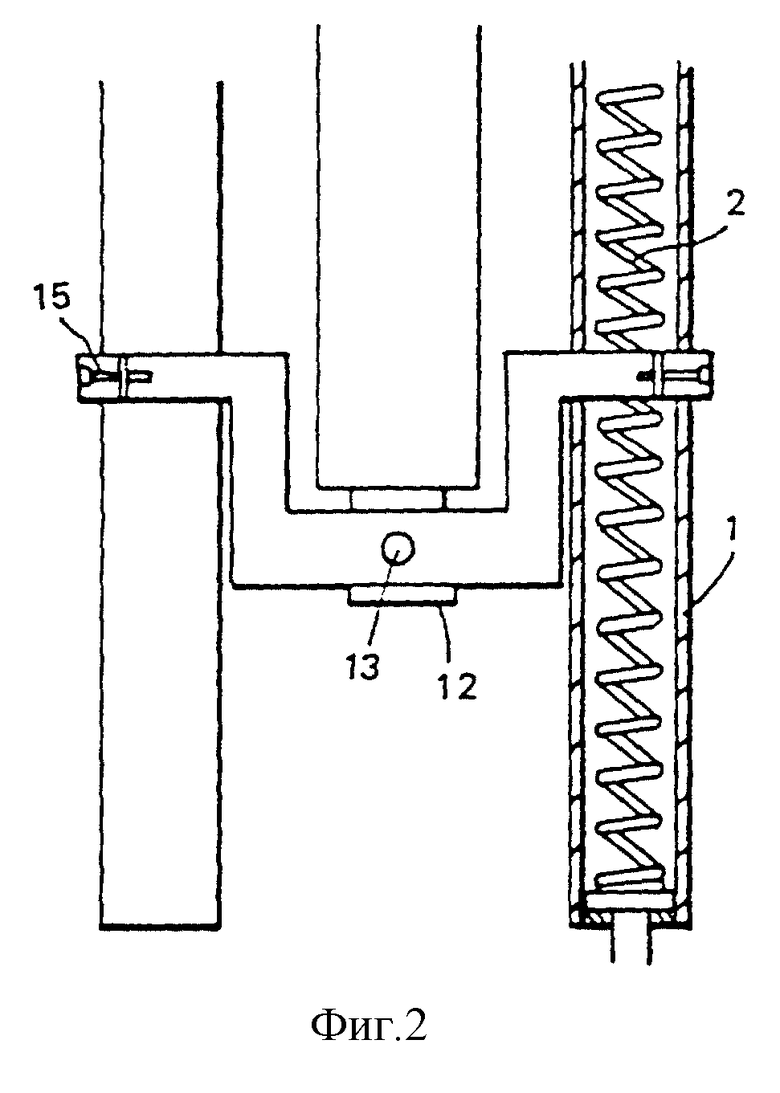
фиг. 2 - альтернативное расположение части блока, показанного на фиг. 1;
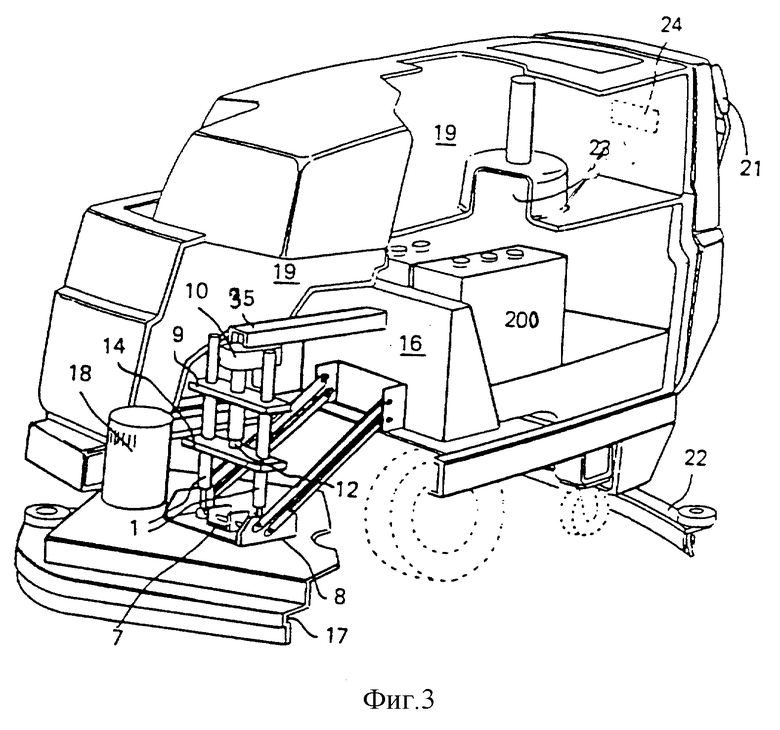
фиг. 3 - перспективный вид частично с вырывом машины для чистки, включающей в себя показанный на фиг. 1 и 2 щеточный блок;
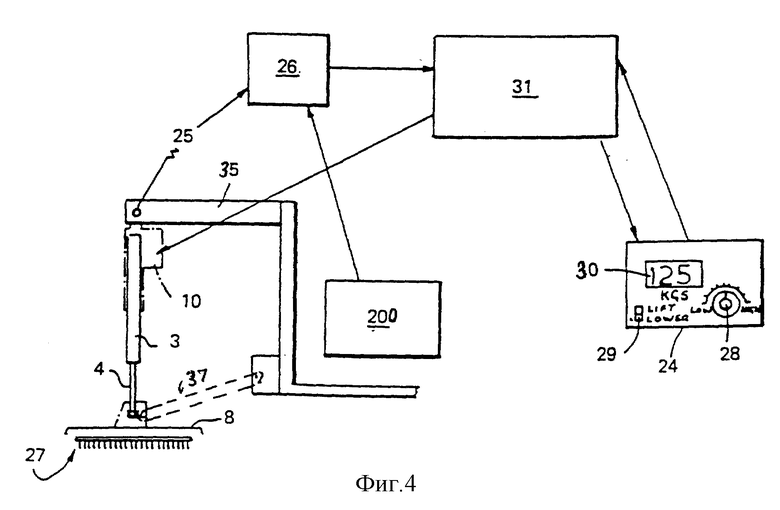
фиг. 4 - система управления машины для чистки, показанной на фиг. 1-3;
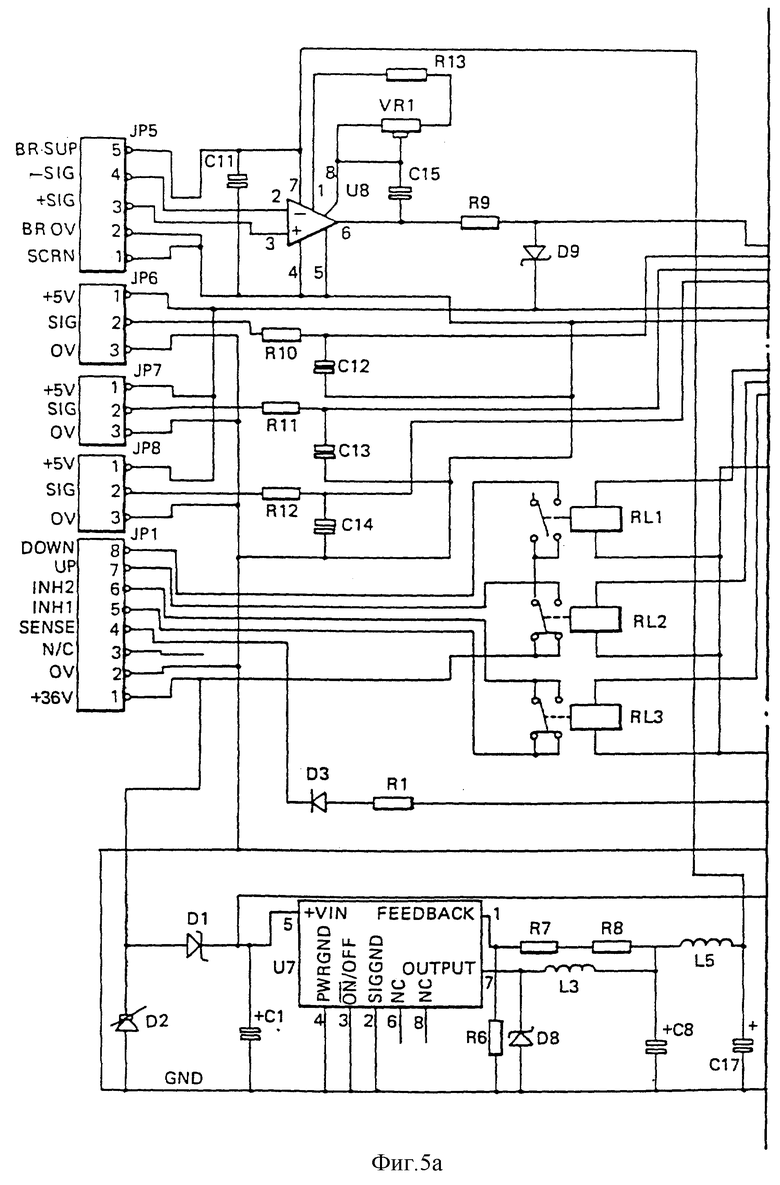
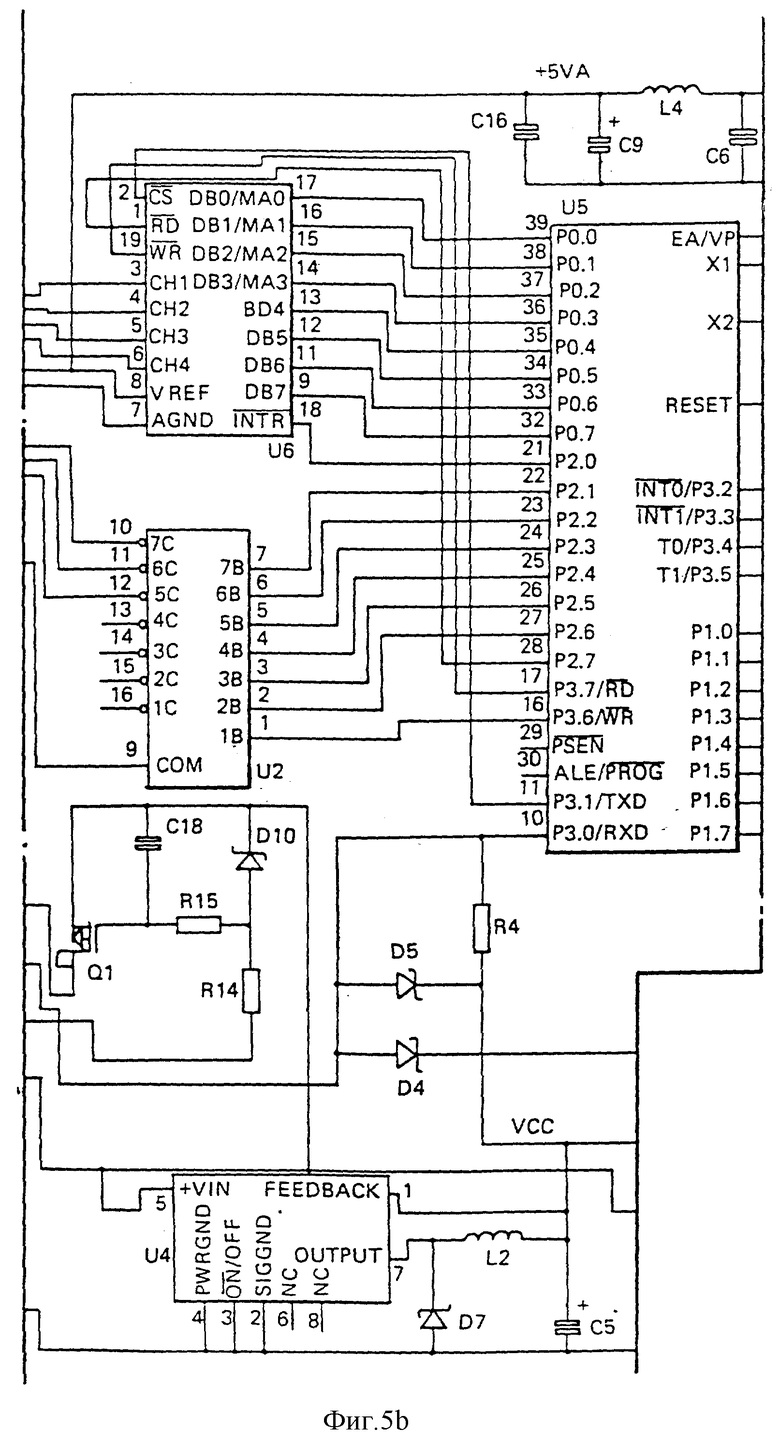
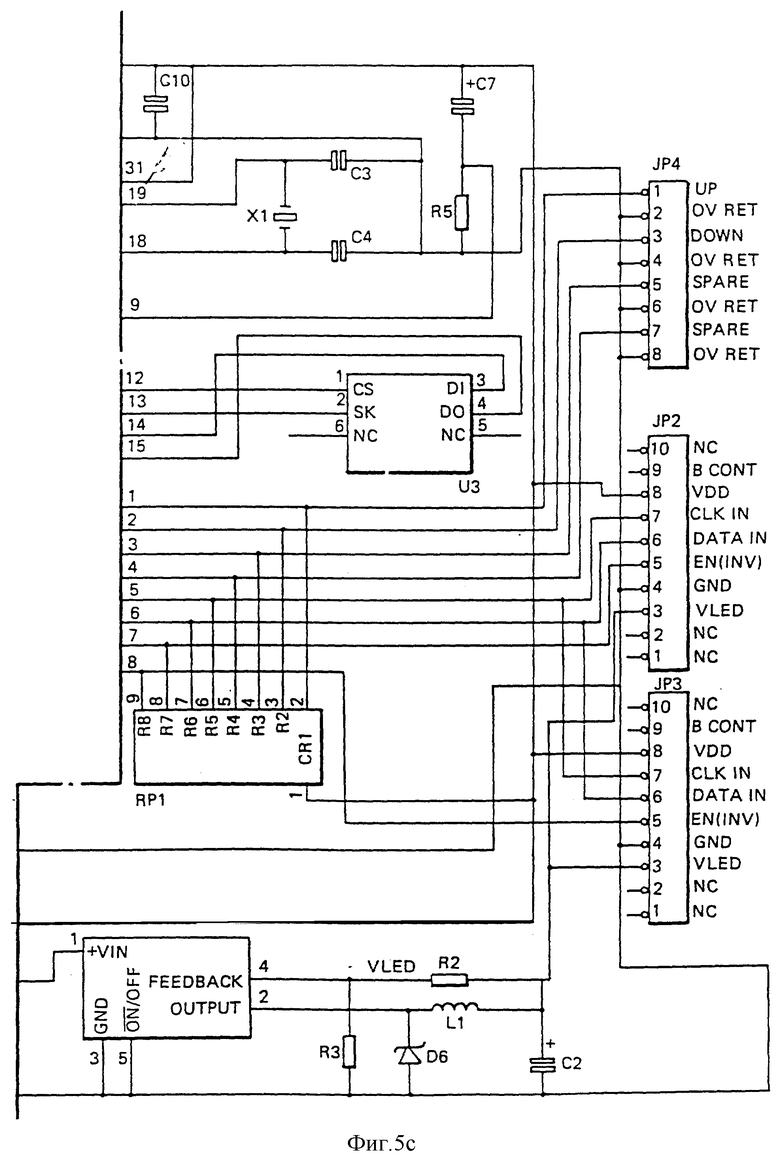
фиг. 5а,b,с - схема коммутаций, иллюстрирующая один вариант системы управления по фиг. 4.
На фиг. 1 ясно видно что блок щеток содержит две трубки 1 для пружин, в которых расположены пружины 2. Правая трубка показана в разрезе, чтобы показать пружину 2. Каждая пружина 2 одним своим концом прикреплена к верхнему концу трубки в точке 3, а другим своим концом прикреплена к пружинному стержню 4, который скользящим образом проходит через отверстие 5, образованное в соответствующей трубке 1 для пружины. Пружинные стержни 4 соединены между собой с помощью болта 6 и скреплены посредством блока 7 с опорной плитой щеток 8, с которой соединены головка или головки щеток 27.
С помощью стабилизирующей пластины 9 исключается возможность вращения или смещения трубок 1. Исполнительный механизм 10 закреплен в верхней части машины для чистки. Исполнительный механизм 10 приводит в действие шток 12 исполнительного механизма, который на фиг. 1 показан по существу в закрытой позиции. Шток 12 исполнительного механизма 10 с помощью штифта 13 крепится к планке 14 исполнительного механизма, которая зажимными болтами 15 крепится к обеим трубкам 1 для пружин. Следовательно, когда исполнительный механизм 10 вынуждает шток 12 исполнительного механизма перемещаться вниз, происходит движение вниз и трубок 1 для пружин, а находящиеся в трубках пружины 2 сжимаются, что приводит к возникновению в блоке головки щетки более высокого давления с одновременным образованием под состояния подвески, чтобы блок щеток лучше приспособился к неровной поверхности пола и тем самым уменьшился износ самих щеток. Обычно рабочая или эффективная длина пружин 2 (в разжатом состоянии) равна примерно 15 дюймам (примерно 381 мм), и эта длина будет особенно приемлемой для системы давления щеток размером 26/32 дюйма (660/813 мм). Подобное устройство может обеспечивать диапазон давления от 0 до 450 фунтов (примерно 205 кг) для загруженной машины для чистки с управлением рядом идущим оператором, снабженной устройством по изобретению, в то время как в уже известных машинах подобного типа достигается максимальное давление лишь 200 фунтов (примерно 91 кг). Вполне понятно, что можно использовать и другие формы смещающего средства. Работающая на кручение пружина имеет то преимущество, что она занимает меньше вертикального пространства в машине для чистки. Кроме того, работающая на кручение пружина имеет низкий модуль пружины, что особенно важно для этой цели. Можно также использовать газовые стойки или гидравлические либо пневматические системы.
Давление можно также регулировать посредством изменения длины пружин или же посредством изменения различных пределов прочности позиции крепления трубок для пружин. Однако все эти изменения должен осуществлять инженер-специалист по техобслуживанию.
Предлагаемая система поддается легкой регулировке, хотя бы по той простой причине, что исполнительный механизм можно останавливать в любой позиции его рабочего хода.
Как правило, опорная плита 8 щеток будет крепиться к какой-то паре круглых или эллиптической формы щеток, вращающихся в плоскости, в общем параллельной полу (или предназначенной для чистки или подметания поверхности). В некоторых машинах для чистки можно использовать до четырех (максимум) щеток, a систему по изобретению можно будет использовать для регулирования всех этих четырех щеток одновременно или индивидуально каждую (в последнем случае для каждого блока щеток необходимо будет использовать отдельный исполнительный механизм). Вполне понятно, что в равной степени легко и просто регулировать цилиндрическую головку щетки, которая устанавливается на опорной плите 8 щеток, или альтернативно регулировать на каждом конце вала щетки посредством соответствующих показанных на фиг. 1 индивидуальных блоков.
Блок тензометрического датчика 20, который можно использовать для измерения давления щетки, расположен под зажимной планкой 14 трубок для пружин.
На фиг. 2 показано альтернативное выполнение планки 14 исполнительного механизма, где эта планка имеет U-образную форму, чтобы она прочно соединялась с трубками 1 для пружин в плоскости, расположенной на некотором расстоянии от плоскости, в которой планка 14 крепится к штоку 12 исполнительного механизма. Подобное расположение компонентов дает возможность добиться исключительно небольших давлений щеток даже в случае использования мощных пружин.
На фиг. 3 показан блок щеток по фиг. 1, который установлен в машине для чистки с управлением рядом идущим оператором. Одинаковые части на этом чертеже обозначены одинаковыми ссылочными позициями, а две трубки 1 для пружин 2 крепятся к штоку 12 исполнительного механизма 10 с помощью планки 14 исполнительного механизма. Исполнительный механизм 10 крепится с помощью штанги 35 к раме 16 машины. Второе шарнирное монтажное средство 37 соединяет блок 7 и опорную плиту щеток 8 с рамой 16. Сами щетки на фиг. 3 не показаны, однако они в данном случае установлены под опорной плитой 8 позади предохранительного фланца 17 и приводятся в действие электродвигателями 18 для щеток (один из которых показан на фиг. 3).
На фиг. 3 также показаны относительные позиции бака или баков для воды, а также портативный батарейный источник питания 200 для обеспечения срабатывания электродвигателей 18 для щеток вместе с поперечным приводом машины для чистки. Направление поперечного привода регулируется рукояткой 21. Всасывающая способность резиновой швабры обеспечивается через вакуумный исполнительный механизм 23.
Кроме того, в пределах видимости оператора находится пульт 24 регулирования давления головки щетки.
На фиг. 4 схематически показан блок щетки (вид сбоку), а система управления показана в виде блок-схемы.
Позиция головки щетки 27 относительно предназначенного для чистки пола регулируется электрическим или гидравлическим исполнительным механизмом 10, поднимающим или опускающим головку щетки с помощью штока исполнительного механизма, который сжимает находящиеся в трубках 1 пружины. Для подачи давления в головку щетки напротив пола можно использовать другое упругое средство, например газовую стойку, а для регулирования позиции головки щетки, конечно, можно использовать другие средства, например гидравлические или пневматические средства. Некоторые компоненты исполнительного механизма 10 уже были описаны выше.
Датчик давления расположен в одном из стержней, помеченных ссылочной позицией 4, хотя этот датчик может располагаться в любой иной позиции в цилиндре или в плече, или в донной части исполнительного механизма. В практической ситуации этот датчик постоянно контролирует оказываемое щеткой на пол давление и генерирует сигнал 25. В качестве датчика давления может выступать блок тензометрического датчика 20, расположенный на планке 14 исполнительного механизма 10, которая показана на фиг. 1, или пьезоэлектрический датчик, или датчик положения. С другой стороны, для измерения давления можно использовать закрепляющий штифт (11 на фиг. 1), который соединяет блок щетки с рамой машины и в качестве которого может выступать устройство измерения сдвига. Усилитель 26 преобразует сигнал 25 давления в значение, приемлемое для последующей обработки.
В пределах видимости оператора находится пульт 24 регулирования. На этом пульте расположена кнопка 28 выбора давления, с помощью которой оператор может заранее выбрать какое-то специфическое давление. Кулисный переключатель 29 поднимает или опускает головку щетки 27 относительно пола в зависимости от позиции этого переключателя. Цифровой индикатор 30 показывает давление головки щетки 27 на пол, измеренное с помощью датчика давления.
Процессор 31 сравнивает сигнал измеренного давления с выбранным оператором давлением и генерирует сигнал управления, который, следовательно, будет регулировать (в случае необходимости) режим работы исполнительного механизма, чтобы сделать измеренное давление по существу равным выбранному оператором давлению.
Упомянутый процессор может иметь простую конструкцию, включающую в себя, например, электронный компаратор и схему усилителя, или же он может содержать стандартный блок центрального процессора в форме чипа.
Энергия для электронных компонентов подается от встроенного батарейного источника питания 200 или от альтернативных батарейных источников питания малой мощности.
Показанную на фиг. 5 схему можно использовать в качестве системы управления машиной для чистки. Эта схема содержит стандартные интегральные схемы, включающие в себя программируемый микроконтроллер U5, интегральные схемы (ИС) U1, U4 и U7, а также энергонезависимое запоминающее устройство U3, аналого-цифровой преобразователь U6 и буферный усилитель U2.
Сигнал измеренного давления от измеренного мостика давления или от тензометрического датчика, установленного в очищающей головке, подается в микропроцессор U5 через измерительный усилитель U2 и аналого-цифровой преобразователь U6.
Переменные значения системы хранятся в энергозависимом запоминающем устройстве U3.
Состояние входных сигналов внешнего переключателя в машине для чистки отбирается с помощью буферного устройства JP4.
Микропроцессор U5 осуществляет соответствующие вычисления на основе отобранных значений и заданных переменных системы, а затем выдает сигналы управления через буферный усилитель U2, реле RL1, RL2 и RL3 и буферное устройство JP1 в контактные реле, чтобы обеспечить срабатывание исполнительного механизма на самой машине для чистки пола. Например, после размыкания реле RL1 напряжение в 36 B подается в исполнительный механизм для опускания чистящей головки, после размыкания реле RL2 напряжение в 36 B подается с целью подъема чистящей головки, а после размыкания реле RL3 вообще запрещаются управление и прочие манипуляции машиной для чистки пола. Факультативно можно предусмотреть и использовать дополнительное реле для запрещения срабатывания мотора щетки при каких-то конкретных заданных условиях - например, когда села аккумуляторная батарея, и ее мощности недостаточно, чтобы соответствовать гарантии, предусмотренной для этой аккумуляторной батареи.
Ввод SENSE на буферном устройстве JP1 считывает, происходит ли перемещение машины для чистки или нет; если машина движется, тогда схема запрещает изменение давления, чтобы избежать возможного повреждения щеток.
Буферные устройства JP2 и JP3 подают сигналы на пульт управления машиной, чтобы визуально воспроизвести показание фактического измеренного давления и показание установленного значения соответственно на светодиодных индикаторах.
Схема, содержащая полевой МОП-транзистор Q1, сопротивления R14, R15 вместе с диодом D10, а также конденсатор C18, представлена схемой выпадания из синхронизации режима нормального потребления энергии и предназначена для прекращения генерирования импульсов реле в процессе переключения, чтобы тем самым избежать ненужного срабатывания исполнительного механизма. Это является факультативным вариантом, и существует несколько различных путей его реализации, которые хорошо известны всем специалистам в данной области.
Как показано на чертежах схемы, JP6 и JP7 не используются.
Упомянутая схема легко поддается модификации, например, рекомендуется включать в нее монитор аккумуляторной батареи с целью фиксирования общей продолжительности использования и постоянного контроля за состоянием заряда этой батареи. При определенных заданных условиях, например при введении определенной программы в схему памяти параметров системы U3, чистящие щетки будут приподниматься автоматически. К этим условиям обычно относится длительное использование аккумуляторной батареи и/или низкий заряд батареи. В случае возникновения одной из таких ситуаций оператор должен будет доставить машину в пункт техобслуживания, чтобы повторно зарядить или заменить аккумуляторную батарею и тем самым поддержать гарантийный срок ее службы.
Схема управления по изобретению поддается исключительно точной регулировке и обеспечивает исключительно точную регулировку давления головки щетки.
Является предпочтительным программировать микроконтроллер U5 с таким расчетом, чтобы он всегда осуществлял изменения давления в каком-то одном направлении, например при движении щеток вниз, что будет способствовать достижению более точной установки щеток. Например, если оператору необходимо изменить давление со 100 на 40 фунтов (примерно с 45 до 18 кг), в этом случае контроллер обеспечивает переход к значению примерно в 20 фунтов (примерно 9 кг) с последующим медленным повышением давления до требуемого значения примерно в 40 фунтов (18 кг). Это поможет исключить ненужные сбои в машине для чистки. Является особенно предпочтительным, чтобы микроконтроллер использовал также результаты вычислений опережения по фазе, чтобы он мог рассчитывать скорость, при которой происходят изменения давления, и осуществлять соответствующие регулировки.
Является также предпочтительным, чтобы эта схема постоянно наблюдала и контролировала состояние внешнего переключателя подъема/опускания головки щетки, а микропроцессор U5 можно запрограммировать так, чтобы при принятии решений относительно выполнения каких-то конкретных операций, он учитывал также состояние или положение этого переключателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 1997 |
|
RU2183422C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ (ВАРИАНТЫ) | 1998 |
|
RU2194433C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЛИВАНИЯ БОЛЬНОМУ ЛЕКАРСТВЕННОГО ПРЕПАРАТА | 1995 |
|
RU2138302C1 |
| ПОДМЕТАЛЬНАЯ МАШИНА ДЛЯ ПРОЕЗЖЕЙ ЧАСТИ С НЕСКОЛЬКИМИ РЕЖИМАМИ ПОДМЕТАНИЯ | 2018 |
|
RU2721270C1 |
| РАБОЧАЯ МАШИНА | 2008 |
|
RU2478559C2 |
| СИСТЕМА ДЛЯ МОНИТОРИНГА АНОДОВ, ПРИМЕНЯЕМАЯ В ЭЛЕКТРОЛИТИЧЕСКОМ ПРОЦЕССЕ | 2016 |
|
RU2704395C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНОГО УСТРОЙСТВА | 2003 |
|
RU2309116C2 |
| ПОДМЕТАЛЬНЫЙ АГРЕГАТ | 2000 |
|
RU2250293C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЗУБНОЙ ЩЕТКИ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ УГЛА ЧИСТКИ (ВАРИАНТЫ) | 2015 |
|
RU2695257C2 |
| ПОДМЕТАЛЬНЫЙ АГРЕГАТ | 2000 |
|
RU2241091C2 |
Изобретение относится к устройствам для чистки или подметания поверхности на желаемое расстояние или на регулируемое переменное расстояние. Изобретение предусматривает использование длинных пружин, которые устанавливаются в предназначенных для них трубках и сжимаются электрическим исполнительным механизмом. Рабочие давления измеряются и визуально воспроизводятся на пульте управления оператора, и их можно поддерживать на достаточно постоянном уровне, несмотря на неровновности пола, с помощью схемы управления с обратной связью. Оператор может вводить желаемое давление, а обратную связь можно использовать для приравнивания рабочего давления к выбранному давлению. За счет возможности регулирования давления щеток машину можно использовать для чистки сильно загрязненных поверхностей или для мытья поверхностей щетками, для выполнения легких процедур подметания, причем во всех случаях отпадает необходимость в переналадке и установке режима работы машины и без чрезмерного износа дорогостоящих щеток или повреждения поверхности пола. Техническим результатом данного изобретения является отсутствие проблемы с практическим использованием данной машины и возможность ею маневрировать, что дает возможность использовать данную машину женщинами. 13 з.п.ф-лы, 5 ил.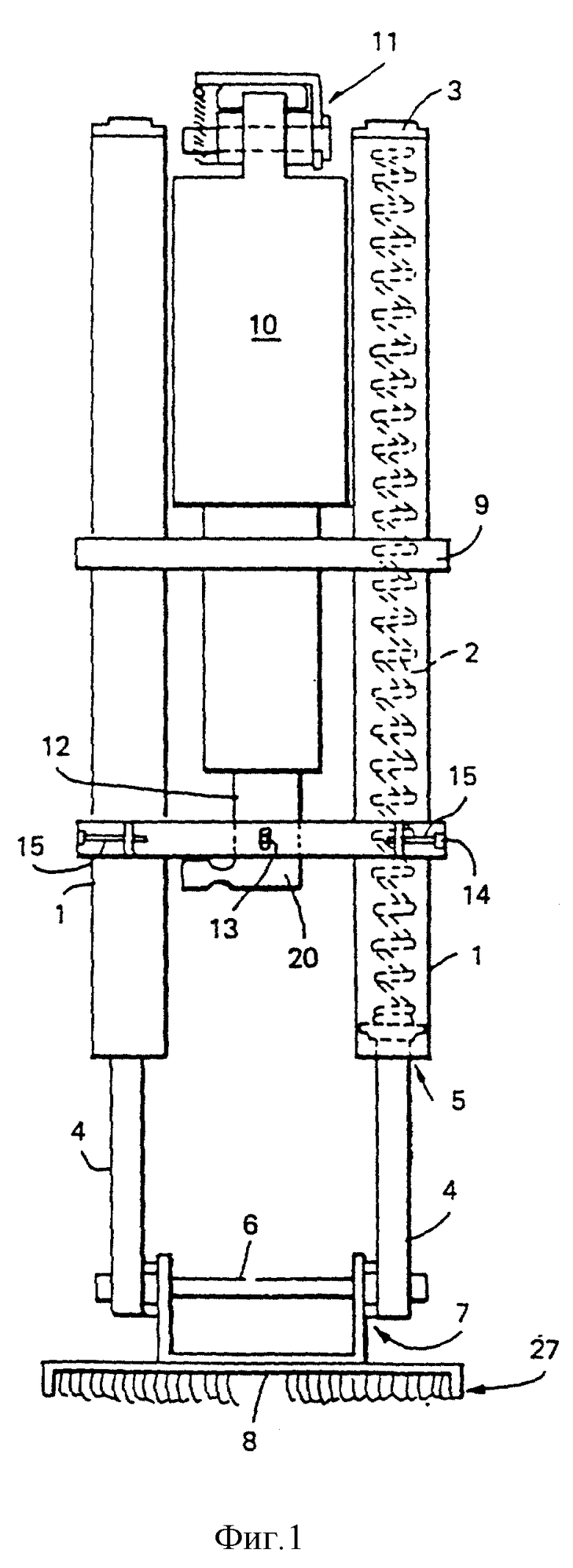
Приоритет по пунктам:
10.06.94 по пп.1 - 13;
07.11.94 по п.14.
| ПОДЪЕМА ПАЧЕК ДЛИННОЛ1ЕРНЫХ ГРУЗОВ | 0 |
|
SU173394A1 |
| ФУТЕРОВКА МАГНИЕВОГО ЭЛЕКТРОЛИЗЕРА | 0 |
|
SU241694A1 |
| US 4218798 А, 26.08.1980 | |||
| US 4910824 А, 27.03.1990 | |||
| ДИЭЛЬКОМЕТРИЧЕСКИИ ДАТЧИК | 0 |
|
SU391457A1 |
| JP 03295527 А, 26.12.1991 | |||
| Машина для очистки поверхностей | 1986 |
|
SU1369729A1 |

