Изобретение относится к области радиолокации, в частности к методам определения траектории движения цели в разнесенной радиолокации.
Известно устройство для определения параметров движения цели (см. 1. Патент на изобретение РФ №2124220, М. кл. G01S 13/06, опубл. 27.12.1998), содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, последовательно соединенной с приемным устройством, детектором и фильтром низких частот, выход которого соединен с входами блока измерения направления прихода интерференционного сигнала и входами блока измерения доплеровской частоты, выход блока измерения направления прихода интерференционного сигнала соединен в первыми входами блока экстраполяции измеряемых параметров и блока вычисления траекторных параметров, причем один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а другой вход - с выходом блока измерения доплеровской частоты, выход блока экстраполяции измеряемых параметров соединен со входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, выход блока вычисления траекторных параметров является выходом системы.
Известно также устройство для определения параметров движения цели (см. 2. Патент на изобретение РФ №2133480, М. кл. G01S 3/72, G01S 7/42, опубл. 20.07.1999), содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, последовательно соединенной с приемным устройством, детектором и фильтром низких частот, выход которого соединен с входами блока измерения направления прихода интерференционного сигнала и входами блока измерения доплеровской частоты, выход блока измерения доплеровской частоты соединен со входом блока определения поверхности положения, выход которого соединен с первым входом блока вычисления траекторных параметров, второй вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, выход блока вычисления траекторных параметров является выходом системы.
Известно устройство для определения параметров движения объекта (см. 3. Патент на изобретение РФ №2154840, М. кл. G01S 13/06, опубл. 20.08.2000), содержащее передающую позицию и в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, выход которого соединен со входами блока измерения доплеровской частоты и входами блока измерения направления прихода интерференционного сигнала, блока экстраполяции измеряемых параметров, один вход которого соединен с выходом блока измерения доплеровской частоты, второй вход - с выходом блока измерения направления прихода интерференционного сигнала, а выход соединен со входом блока вычисления момента времени пересечения целью линии базы, блока определения поверхности положения, соединенного одним своим входом с выходом блока вычисления момента времени пересечения целью линии базы, вторым - с выходом блока экстраполяции измеряемых параметров, а выходом с одним из входов блока вычисления траекторных параметров, другой вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала и блок конечного вычисления траекторных параметров, причем один вход блока определения статистических характеристик ошибок измерения доплеровской частоты и направления прихода интерференционного сигнала соединен с выходом блока измерения направления прихода интерференционного сигнала, второй вход - с выходом блока измерения доплеровской частоты, а выход соединен с одним из четырех входов блока конечного вычисления траекторных параметров, другие три входа которого раздельно соединены с выходами блока измерения направления прихода интерференционного сигнала, блока измерения доплеровской частоты и блока вычисления траекторных параметров, при этом выходом всего устройства является выход блока конечного вычисления траекторных параметров.
Кроме того, в (см. 4. Патент на изобретение РФ №2168740, МПК7 G01S 13/06, опубл. 10.06.2001) рассмотрено устройство для определения параметров движения цели, содержащее передающую позицию и находящуюся в удаленной от нее точке приемную позицию, состоящую из антенны, соединенной с приемным устройством, имеющим N парциальных каналов, выходы которых соединены с соответствующими входами блока измерения доплеровской частоты и блока измерения направления прихода интерференционного сигнала, каждый из N парциальных каналов состоит из приемника, и содержащую также блок экстраполяции измеряемых параметров, блок вычисления момента времени пересечения целью линии базы и блок определения поверхности положения, выход которого соединен с одним из входов блока вычисления траекторных параметров, другой вход блока вычисления траекторных параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход является выходом всего устройства, один из входов блока экстраполяции измеряемых параметров соединен с выходом блока измерения направления прихода интерференционного сигнала, а выход - с входом блока вычисления момента времени пересечения целью линии базы и одним из входов блока определения поверхности положения, другой вход которого соединен с выходом блока вычисления момента времени пересечения целью линии базы, блока деления опорного напряжения, вход которого является одним из входов приемного устройства, а один из выходов соединен непосредственно с входом соответствующего приемника, в остальные N-1 парциальных каналов введены суммирующие устройства, один из входов которых является входов приемного устройства, а другой соединен с соответствующим выходом блока деления опорного напряжения, выход каждого суммирующего устройства соединен с соответствующим приемником, кроме того, в устройство введен блок идентификации сигналов по частоте и вычитания ложных сигналов, вход которого соединен с выходом блока измерения доплеровской частоты, а выход - с одним из входов блока экстраполяции измеряемых параметров.
В данных устройствах необходимо проводить экстраполяцию доплеровской частоты на время, необходимое для достижения целью линии базы. После чего определяется момент времени пересечения целью линии базы. Затем интегрированием измеренных значений суммарной доплеровской частоты от текущего момента времени до рассчитанного момента времени пересечения целью линии базы определяется суммарная дальность.
Одновременно измеряется азимут цели относительно приемной позиции и по вычисленному значению суммарной дальности рассчитывается дальность относительно приемной позиции.
Процедура экстраполяции накладывает определенные ограничения на гипотезу движения цели. При совершении целью маневра точность определения момента пересечения целью линии базы уменьшается, что приводит к ошибкам определения суммарной дальности, а, следовательно, и дальности относительно приемной позиции.
Кроме того, при полете цели под углом к линии базы время экстраполяции доплеровской частоты может стать значительным, что приводит к увеличению ошибок определения траекторных параметров.
И наконец, при полете цели параллельно базе определение траекторных параметров становится невозможным.
Известно также устройство для определения параметров движения цели (см. 5. Патент на полезную модель РФ №109869, М. кл. G01S 3/46. опубл. 27.10.2011), содержащее передающую позицию, состоящую из последовательно соединенных передатчика и антенны, и в удаленной от нее точке приемную позицию, которая состоит из антенны приемной позиции, имеющей N выходов, каждый из которых кроме центрального соединен с одним из входов соответствующего суммирующего устройства, выход которого соединен с соответствующим приемником, а центральный выход антенны соединен с блоком деления опорного напряжения, один из выходов которого соединен непосредственно с входом приемника центрального парциального канала, а остальные N-1 выходов соединены со вторыми входами суммирующих устройств соответствующих парциальных каналов, блока определения азимутального положения диаграммы направленности антенны передающей позиции, вход которого подключен ко второму выходу приемника центрального парциального канала, а выход подключен ко второму входу блока вычисления траекторных параметров, при этом передатчик передающей позиции содержит последовательно соединенные блок синхронизации, синтезатор частоты, усилитель мощности и блок управления лучом, второй вход которой соединен со вторым выходом блока синхронизации, а выход соединен с входом передающей антенны, при этом выходы приемника каждого из парциальных каналов раздельно соединены с соответствующими входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого является выходом всего устройства.
Однако в рассмотренном устройстве возникает сложность юстировки антенны приемной позиции относительно парциального луча антенны передающей позиции. Это может привести к систематической ошибке определения дальности.
Известны также способы определения дальности на основе частотных радиодальномеров (см. 6. Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2004, 320 с., стр.234, рис.10.5).
Однако применение в устройствах, реализующих эти способы, в качестве зондирующего сигнала ЛЧМ радиоимпульса затрудняет селекцию целей вблизи окрестности линии базы.
Эта же проблема имеет место в импульсном дальномере (см. 6. Бакулев П.А. радиолокационные системы. - М.: Радиотехника, 2004, 320 с., стр.240, рис.10.13)
Известно также устройство для определения параметров движения цели (см. 7. патент на полезную модель РФ №107370, МПК G01S 13/06, опубл. 10.08.2011 г.), содержащее передающую позицию, состоящую из передатчика и передающей антенны и находящуюся в удаленной от нее точке, приемную позицию, состоящую из приемной антенны, двух цепей, включающих в себя последовательно соединенные приемник, детектор и фильтр нижних частот, при этом выходы фильтров нижних частот первой и второй цепей соединены соответственно с первым и вторым входами блока измерения направления прихода интерференционного сигнала, выход которого соединен с первым входом блока вычисления траекторных параметров, выход которого является выходом устройства, а также первого блока измерения доплеровской частоты, вход которого соединен с выходом фильтра нижних частот первой цепи, а первый выход приемной антенны соединен с входом приемника первой цепи, передающая позиция содержит последовательно соединенныевторой передатчик и блок суммирования, второй вход которого соединен с выходом первого передатчика, а выход соединен с входом передающей антенны, приемная позиция дополнительно содержит блок разделения, вход которого соединен со вторым выходом приемной антенны, а его первый выход соединен с входом приемника второй цепи, третью цепь, состоящую из последовательно соединенных приемника, детектора и фильтра нижних частот, причем вход приемника третьей цепи соединен со вторым выходом блока разделения, последовательно соединенные измеритель разности фаз, первый и второй входы которого соединены соответственно с выходами фильтров нижних частот второй и третьей цепей, и блок оценки суммарной дальности, выход которого соединен со вторым входом блока вычисления траекторных параметров, последовательно соединенные второй блок измерения доплеровской частоты, вход которого соединен с выходом фильтра нижних частот третьей цепи, и блок оценки скорости изменения направления прихода интерференционного сигнала, второй вход которого соединен с выходом блока измерения направления прихода интерференционного сигнала, третий вход соединен с выходом первого блока измерения доплеровской частоты, а выход подключен к третьему входу блока вычисления траекторных параметров, к четвертому входу которого подключен выход блока масштабирования, вход которого соединен с выходом первого блока измерения доплеровской частоты.
Однако при работе данного устройства делается допущение об одинаковом значении фаз при отражении сигналов с малым частотным разносом от цели.
Кроме того, отражение от земной поверхности как сигнала распространяющегося вдоль линии базы, так и при отражении от земной поверхности по линии передающая позиция - цель и цель - приемная позиция, может существенно изменить фазовые соотношения.
В результате снижается точность определения дальности до цели при траекториях движения цели, совершающих маневр в области пространства вблизи линии базы, в окрестности которой наблюдается резкое (на 30-40 дБ) возрастание ЭПР, и до целей, летящих под малыми углами и параллельно линии базы.
Данное устройство принято за прототип.
Достигаемым техническим результатом изобретения является повышение точности определения дальности до цели относительно приемной позиции при траекториях движения цели, совершающих маневр в зоне обзора бистатической РЛС, и целей, летящих под малыми углами и параллельно линии базы.
Это достигается тем, что в устройство для определения параметров движения цели, содержащее передающую позицию, которая содержит первый и второй передатчики, выходами подключенные к соответствующим входам блока суммирования, выход которого соединен с входом передающей антенны, приемную позицию, состоящую из приемной антенны, трех цепей, включающих в себя последовательно соединенные приемник, детектор и фильтр нижних частот, при этом выходы фильтров нижних частот первой и второй цепей соединены соответственно с первым и вторым входами блока измерения направления прихода интерференционного сигнала, выход которого подключен к первому входу блока вычисления траекторных параметров, выход которого является выходом устройства, а вход приемника первой цепи соединен с первым выходом приемной антенны, блок разделения по частоте, вход которого соединен со вторым выходом приемной антенны, его первый выход соединен с входом приемника второй цепи, а его второй выход соединен с входом приемника третьей цепи, дополнительно введены синхронизатор, первый и второй выходы которого соединены со входами первого и второго передатчиков соответственно, первый и второй формирователи импульсов, при этом вход первого формирователя импульсов соединен с выходом фильтра нижних частот третьей цепи, измеритель временных интервалов, первый вход которого соединен с выходом первого формирователя импульсов, второй вход - с выходом второго формирователя импульсов, а выход - подключен ко второму входу блока вычисления траекторных параметров, многоканальный спектроанализатор, вход которого соединен со вторым выходом приемника второй цепи, а выход соединен со входом второго формирователя импульсов.
Указанные отличия позволяют определять дальность до цели относительно приемной позиции при траекториях движения цели, совершающих маневр в просветной области, целей, летящих под малыми углами и параллельно линии базы.
Это достигается тем, что в отличие от устройства, принятого за прототип, определяется временной интервал, пропорциональный разности момента времени, отсчитываемого от момента приема сигнала на первой частоте, при его распространении вдоль линии базы (расстояния между передающей и приемной позицией), и формирующего импульс начала отсчета временного интервала, и сигнала, принятого на второй частоте при его распространении по пути передающая позиция - цель - приемная позиция, формирующего конец отсчета временного интервала. Затем по измеренному значению азимута цели относительно приемной позиции βR и сформированной разности расстояний при известном значении базы определяется дальность относительно приемной позиции.
Сравнение предложенного технического решения с другими известными из источников патентной и научно-технической документации показывает, что в них отсутствуют технические решения, позволяющие достигнуть поставленного технического результата. Это дает основание сделать вывод о том, что предложенное техническое решение соответствует критерию «изобретательский уровень».
Предлагаемое устройство поясняется чертежами, где на фиг.1 представлена функциональная схема предлагаемого устройства, на которой обозначены:
1 - синхронизатор;
2 - первый передатчик (ПРД);
3 - второй передатчик (ПРД);
4 - блок суммирования;
5 - передающая антенна;
6 - приемная антенна;
7 - блок разделения по частоте;
8-1, 8-2, 8-3 - первый, второй и третий приемники (ПРМ);
9-1, 9-2, 9-3 - первый, второй и третий детекторы;
10-1, 10-2, 10-3 - первый, второй и третий фильтр нижних частот (ФНЧ);
11 - первый формирователь импульсов;
12 - многоканальный спектроанализатор;
13 - второй формирователь импульсов;
14 - измеритель временных интервалов;
15 - блок измерения направления прихода интерференционного сигнала;
16 - блок вычисления траекторных параметров.
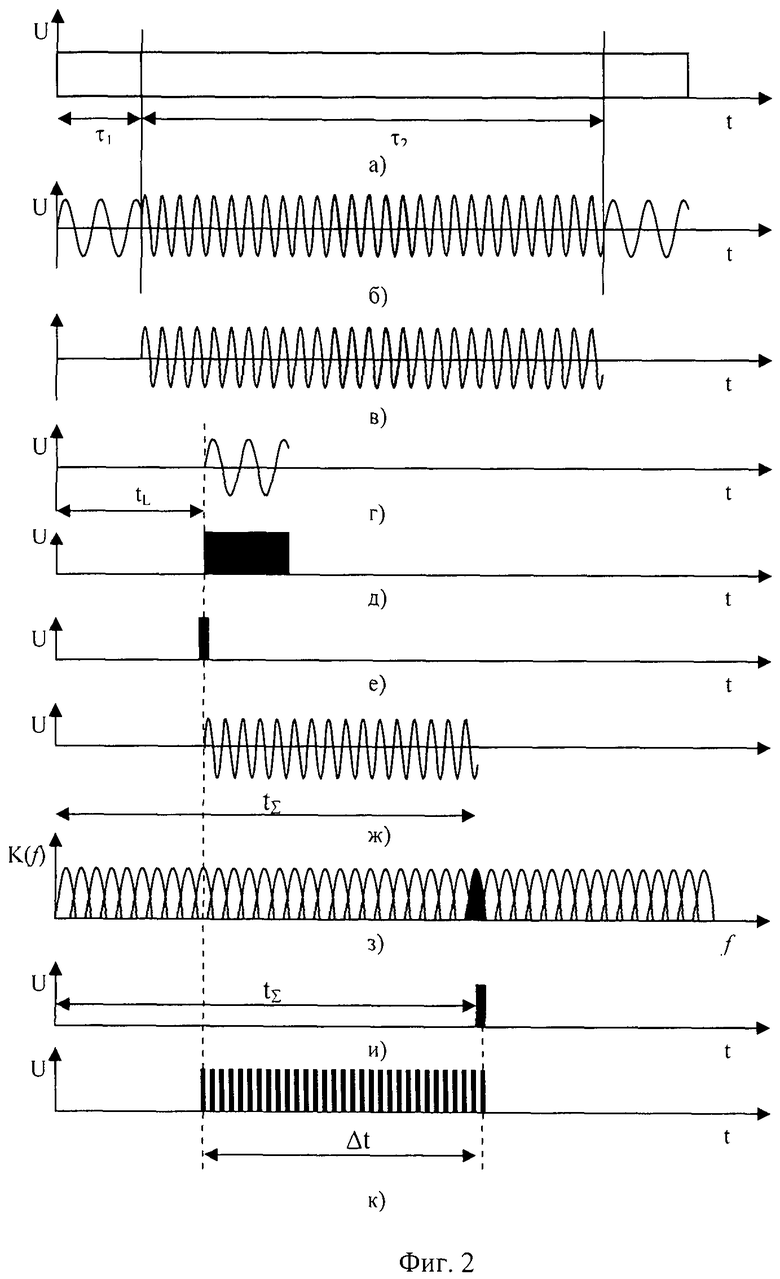
На фиг.2 приведены эпюры, поясняющие работу устройства.
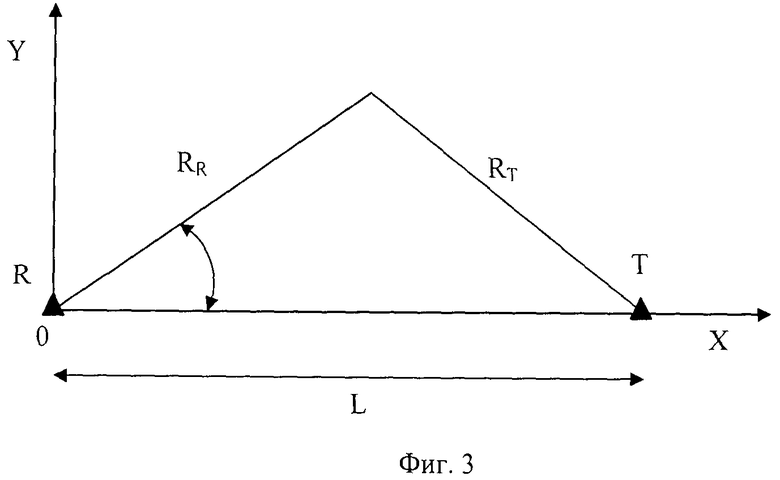
На фиг.3 приведены эпюры, поясняющие геометрическую сущность задачи определения траекторных параметров.
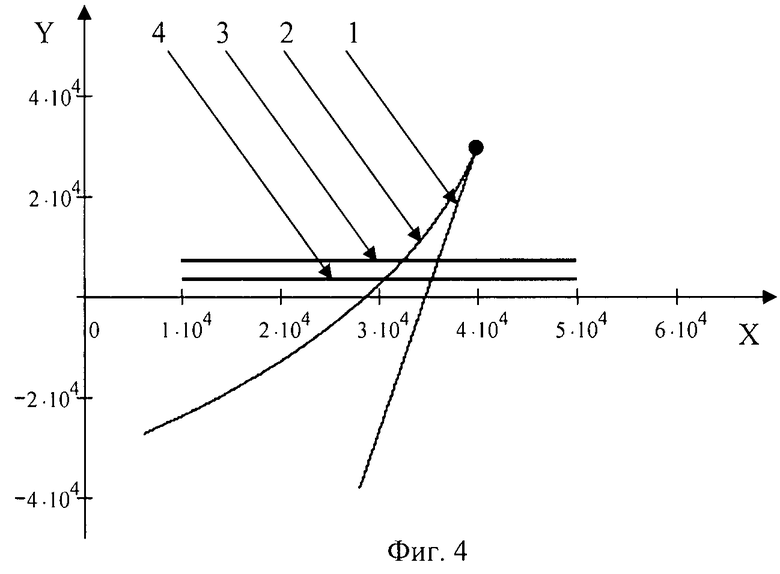
На фиг.4 приведены траектории целей, для которых проводилась оценка точности определения координат.
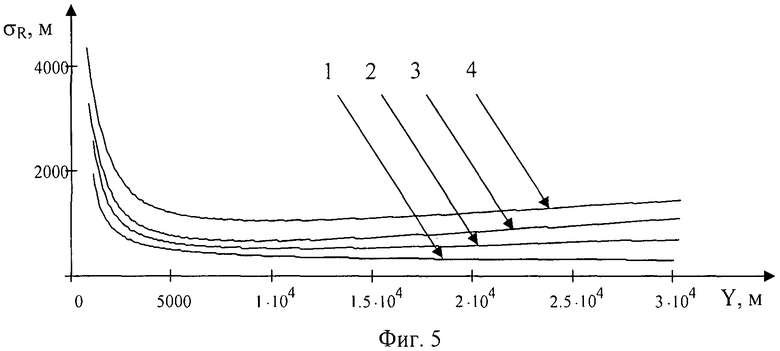
На фиг.5 приведены значения среднеквадратической ошибки (СКО) определения дальностей для первой и второй траектории.
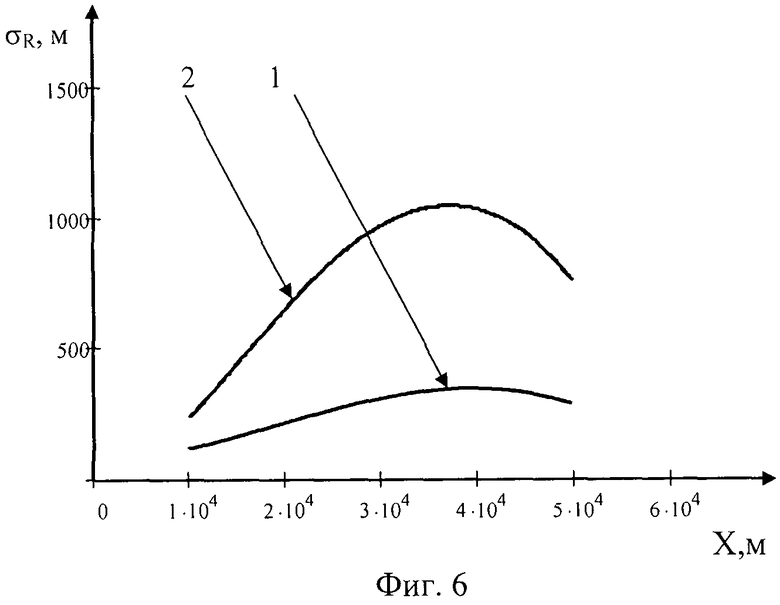
На фиг.6 приведены значения СКО определения дальности для третьей и четвертой траектории.
В предлагаемом устройстве первый выход синхронизатора 1 соединен со входом первого передатчика 2, второй выход которого соединен со входом второго передатчика 3, выходы обоих передатчиков соединены соответственно с первым и вторым входами блока 4 суммирования, выход которого соединен со входом передающей антенны 5.
Приемная антенна 6 своим первым выходом соединена с входом приемника 8.1 первой цепи, выход которого подключен ко входу первого детектора 9.1, выход которого соединен со входом первого фильтра 10.1 нижних частот, выход которого соединен с первым входом блока 15 измерения направления прихода интерференционного сигнала.
Приемная антенна 6 своим вторым выходом соединена с последовательно соединенными блоком 7 разделения по частоте, приемником 8.2 второй цепи, детектором 9.2 второй цепи и фильтром 10.2 нижних частот второй цепи, выход которого соединен со вторым входом блока 15 измерения направления прихода интерференционного сигнала 15, выход которого соединен с первым входом блока 16 вычисления траекторных параметров.
Второй выход блока 7 разделения по частоте, соединен со входом приемника 8.3 третьей цепи, выход которого соединен со входом детектора 9.3 третьей цепи, выход которого подключен ко входу фильтра 10.3 нижних частот третьей цепи, выход которого соединен со входом первого формирователя 11 импульсов, выход которого соединен с первым входом измерителя 14 временных интервалов.
Второй выход приемника 8.2 второй цепи соединен со входом многоканального спектроанализатора 12, выход которого подключен ко входу и второго формирователя 13 импульсов, выход которого соединен со вторым входом измерителя 14 временных интервалов, выход которого соединен со вторым входом блока 16 вычисления траекторных параметров, выход которого является выходом устройства.
В качестве примера рассмотрим работу устройства при локации одиночной цели (см. фиг.1, 2).
Синхронизатор 1 формирует импульсы длительностью τ1 по первому выходу для управления первым передатчиком 2, по второму выходу синхронизатор 1 формирует импульсы длительностью τ2 (фиг.2а).
Первый передатчик 2 генерирует монохроматический сигнал длительностью τ1 на частоте f1 и через первый выход блока 4 суммирования поступает на передающую антенну 5 и излучается в пространство (фиг.2б).
Второй передатчик 3 генерирует монохроматический сигнал длительностью τ2 на частоте f2, который через второй выход блока 4 суммирования поступает на передающую антенну 5 и излучается в пространство (фиг.2в).
Сигнал на частоте f1 через временной интервал

где L - база (расстояние между передающей и приемной позицией), с - скорость света (фиг.2в), принятый приемной антенной 6 через блок 7 разделения по частоте, представляющий собой фильтр для частот f1 и f2, с его первого выхода поступает на вход приемного устройства 8.3 третьей цепи, где после детектирования в детекторе 9.3 и выделении огибающей в фильтре 10.3 низкой частоты (фиг.2д) поступает в первый формирователь 11 импульсов, на выходе которого формируется видеоимпульс (фиг.2е), который подается на первый вход измерителя 14 временных интервалов, который начинает формировать счетные импульсы (фиг.2и).
Сигнал на частоте f2, пройдя по пути R∑=RT+RR, где: RT - дальность от передающей позиции до цели; RR - дальность от цели до приемной позиции после отражения от цели через временной интервал

поступает на вход приемника 8.2 (фиг.2ж), подается на вход многоканального спектроанализатора 12 (фиг.2з), где выделяется сигнал, пропорциональный суммарной доплеровской частоте:




В момент нарастания колебаний, пропорциональных суммарному доплеровскому сдвигу частот в i-м фильтре спектроанализатора 12, второй формирователь 13 импульсов формирует импульс (фиг.2и), который подается на вход измерителя 14 временных интервалов, который формирует значение временного интервала, пропорционального величине:

Канал измерения угловой координаты работает следующим образом. Сигнал на частоте f2, пройдя по пути R∑=RT+RR, поступает на входы приемников 8.1 и 8.2 первой и второй цепей соответственно, детектируется в детекторе 9.1 первой цепи и детекторе 9.2 второй цепи, а в фильтрах 10.1 и 10.2 нижних частот первой и второй цепей соответственно выделяются огибающие сигналы.
С выходов фильтров нижних частот 10.1 и 10.2 первой и второй цепей соответственно сигналы поступают на первый и второй вход блока 15 измерения направления прихода интерференционного сигнала, на выходе которого формируется значение азимута цели относительно приемной позиции βR (фиг.3).
Измеренное значение азимута βR поступает на первый вход блока 16 вычисления траекторных параметров, на второй вход которого поступает значение временного интервала Δt=t∑-tL.
В блоке 16 вычисления траекторных параметров производятся следующие вычислительные процедуры: определяется величина ΔR=сΔt - пропорциональная величине RT+RR-L.
Далее определяется значение дальности до цели относительно приемной позиции по формуле (см. 8. Аверянов В.Я. Разнесенные радиолокационные станции и системы. Мн.: Наука и техника, 1978, 184 с., стр.29, формула 1.30):

Рассмотрим пример выполнения блоков предлагаемого устройства.
Синхронизатор 1 может быть выполнен как в (см.9. Патент на изобретение РФ №2304788, МПК G01S 7/285, H04L 7/00, опубл. 20.08.2007. Модуль синхронизации).
Передатчик (ПРД) 2 первой цепи и передатчик (ПРД) 3 второй цепи могут быть выполнены на основе известных радиопередающих устройств как в аналогичных системах (см.10. Филькенштейн М.И. Основы радиолокации. М.: «Сов. радио», 1973, 496 с., стр.93, рис.2.3.1)
Блок 4 суммирования может быть выполнен как в (см.11. Веселов Г.И., Егоров Е.Н., Алехин Ю.Н. и др. Микроэлектронные устройства СВЧ. Под ред. Веселова Г.И. М.: Высшая школа, 1988. - 280 с., рис.3.27, стр.74).
Предающая антенна 5 и приемная антенна 6 могут быть выполнены на основе известных элементов антенной техники применимых в аналогичных системах (см.10. Филькенштейн М.И. Основы радиолокации. М.: «Сов. радио», 1973, 496 с., стр.93, рис.2.3.1).
Блок 7 разделения по частоте может быть выполнен на основе волноводных разделительных фильтров, например как (см.12 Модель A.M. Фильтры СВЧ в радиорелейных системах, М.: издательство «Связь», 1967, рис.3.3, стр.111, 348 с.)
Приемники (ПРМ) 8.1, 8.2, 8.3 первой, второй и третьей цепей соответственно, дететекторы 9.1, 9.2, 9.3 первой, второй и третьей цепей соответственно, фильтры 10.1, 10.2, 10.3 нижних частот (ФНЧ) первой, второй и третьей цепей соответственно являются типовыми элементами приемного тракта РЛС и могут быть выполнены по аналогии с блок-схемой доплеровского радиолокатора (см. 12. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: «Советское радио» 1970, стр.356, рис.6.26).
Первый формирователь 11 импульсов и второй формирователь 13 импульсов могут быть выполнены на базе известных аналоговых или цифровых формирователей импульсов (триггеров), например (см. 10. Филькенштейн М.И. Основы радиолокации. М.: «Сов. радио», 1973, 496 с., стр.386, рис.8.22).
Многоканальный спектроанализатор 12 может быть выполнен на основе параллельного спектроанализатора (см.10. Филькенштейн М.И. Основы радиолокации. М.: «Сов. радио», 1973, рис.2.6.2, стр.112).
Измеритель 14 временных интервалов может быть выполнен по аналогии с системой измерения дальности (см. 6. Бакулев П.А., радиолокационные системы. - М.: Радиотехника, 2004, 320 с., рис.10.14, стр.240).
Блок 15 измерения направления прихода интерференционного сигнала может представлять собой фазометр (см.13. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: «Советское радио» 1970, 560 стр., стр.300, рис.5.65.), при использовании амплитудного моноимпульсного метода блок 15 может быть выполнен на основе схемы сравнения амплитуд или схемы вычитания (см. 12. Теоретические основы радиолокации. Под. ред. Ширмана Я.Д. М.: «Советское радио» 1970, 560 стр., стр.297, рис.5.62.).
Блок 16 вычисления траекторных параметров представляет собой устройство, реализующее вычислительные процедуры и может быть выполнен (см. 14. Патент на полезную модель РФ №72339, МПК G06F 15/16, опубл. 10.04.2008).
Эффективность устройства оценивалась путем сравнения СКО определения дальности для прототипа и заявляемого устройства при различных траекториях цели (фиг.4).
На фиг.4. приведены следующие траектории цели: 1 - прямолинейный полет цели на постоянной высоте; 2 - траектория цели при совершении ею маневра курсом в горизонтальной плоскости; 3 - траектория цели при параллельном полете к линии базы на дальности 5000 м, 4 - траектория цели при параллельном полете к линии базы на дальности 2000 м. Скорость цели 100 м/с, СКО определения азимута цели σβ=0.1 град, СКО вычисления экстраполированной оценки суммарной доплеровской частоты (а следовательно и суммарной дальности) рассчитывалась как в (см.14. Шишов Ю.А., Ворошилов В.А. Многоканальная радиолокация с временным разделением каналов. М.: Радио и связь, 1987. - 144 с., стр.69), СКО определения разности расстояний для заявляемого устройства полагалась одинаковой σΔR=10 м.
На фиг.5 приведены СКО определения дальности для прототипа и заявляемого устройства. Кривым 1 и 2 соответствует СКО определения координат для заявляемого устройства применительно к траекториям 1 и 2 (фиг.4).
Кривым 3 и 4 соответствует СКО определения координат для прототипа применительно к траекториям 1 и 2 (фиг.4).
На фиг.6. приведены СКО определения дальности при полете цели параллельно линии базы, где цифрой 1 обозначено СКО определения дальности при значении координаты Y=5000 м, цифрой 2 обозначено СКО определения дальности при значении координаты Y=2000 м. Во всех случаях координата Х изменяется от 10.000 м до 50000 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2015 |
|
RU2584332C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 2019 |
|
RU2714672C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1999 |
|
RU2154840C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1997 |
|
RU2124220C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2010 |
|
RU2444757C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
Изобретение относится к области радиолокации. Достигаемый технический результат изобретения - повышение точности определения дальности до цели относительно приемной позиции при траекториях движения цели, совершающих маневр в зоне обзора бистатической радиолокационной станции, и целей, летящих под малыми углами и параллельно линии базы. Это достигается тем, что устройство для определения параметров движения цели содержит передающую позицию, состоящую из передающей антенны, первого и второго передатчиков, блок суммирования, приемную позицию, состоящую из приемной антенны, трех цепей, включающих в себя приемник, детектор и фильтр нижних частот, а также содержит блок измерения направления прихода интерференционного сигнала, блок вычисления траекторных параметров, выход которого является выходом устройства, блок разделения по частоте, синхронизатор, первый и второй формирователи импульсов, измеритель временных интервалов, многоканальный спектроанализатор, определенным образом соединенные между собой. 6 ил.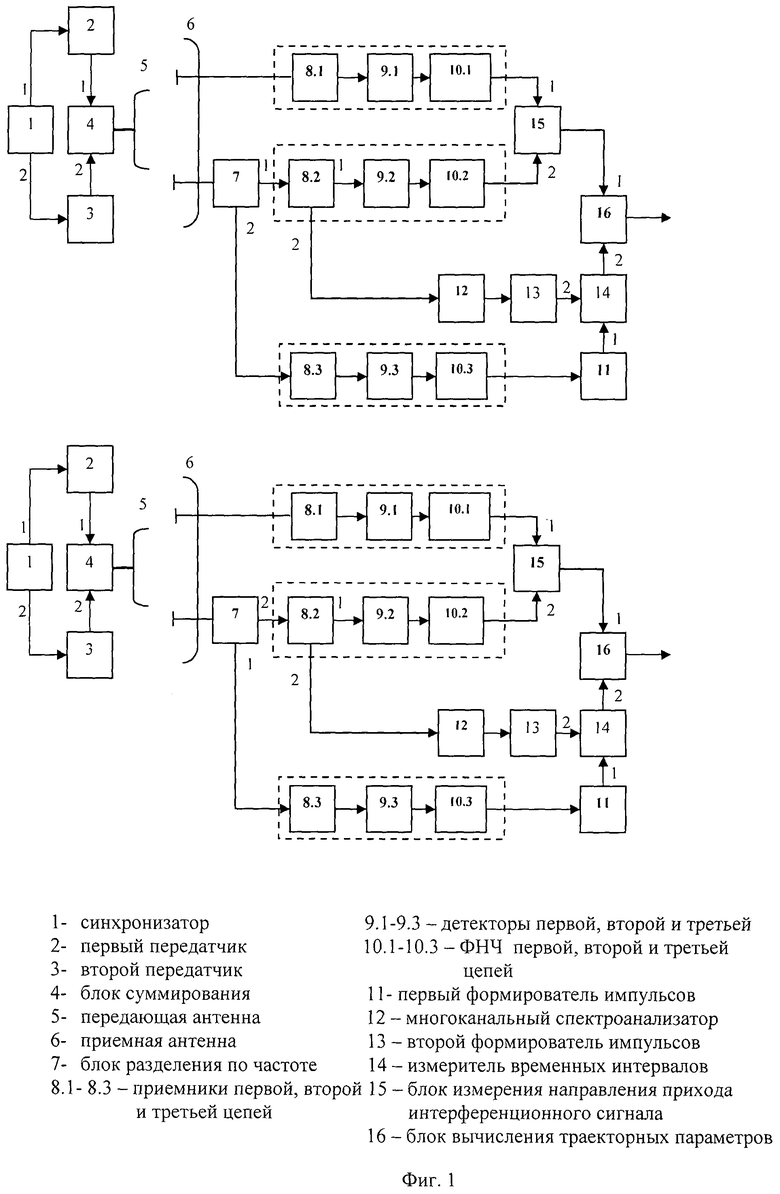
Устройство для определения параметров движения цели, содержащее передающую позицию, которая содержит первый и второй передатчики, выходами подключенные к соответствующим входам блока суммирования, выход которого соединен с входом передающей антенны, приемную позицию, состоящую из приемной антенны, трех цепей, включающих в себя последовательно соединенные приемник, детектор и фильтр нижних частот, при этом выходы фильтров нижних частот первой и второй цепей соединены соответственно с первым и вторым входами блока измерения направления прихода интерференционного сигнала, выход которого подключен к первому входу блока вычисления траекторных параметров, выход которого является выходом устройства, а вход приемника первой цепи соединен с первым выходом приемной антенны, блок разделения по частоте, вход которого соединен со вторым выходом приемной антенны, его первый выход соединен с входом приемника второй цепи, а его второй выход соединен с входом приемника третьей цепи, отличающееся тем, что дополнительно введены синхронизатор, первый и второй выходы которого соединены со входами первого и второго передатчиков соответственно, первый и второй формирователи импульсов, при этом вход первого формирователя импульсов соединен с выходом фильтра нижних частот третьей цепи, измеритель временных интервалов, первый вход которого соединен с выходом первого формирователя импульсов, второй вход - с выходом второго формирователя импульсов, а выход - подключен ко второму входу блока вычисления траекторных параметров, многоканальный спектроанализатор, вход которого соединен со вторым выходом приемника второй цепи, а выход соединен со входом второго формирователя импульсов.
| Подвесная опора рамочной подвижной системы магнитоэлектрического измерительного прибора | 1956 |
|
SU107370A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРИИ ДВИЖЕНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ В ОБЗОРНЫХ РЛС | 2007 |
|
RU2337378C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЦЕЛИ | 1999 |
|
RU2168740C1 |
| Высокотемпературная керосиновая горелка | 1957 |
|
SU109869A1 |
| US 6839017 B1, 04.01.2005 | |||
| Преобразователь постоянного напряжения в @ -ступенчатое переменное | 1981 |
|
SU1014110A1 |
| WO 2002014891 A2, 21.02.2002 | |||
| US 4219813 A, 26.08.1980 | |||

