Предложенное изобретение относится к области космической навигации, в частности, к способам автономной навигации КА.
Известны способы автономной навигации [1-3], базирующиеся на измерении зенитных расстояний 2-х звезд и углового диаметра планеты или на измерении зенитных расстояний 3-х звезд. Под зенитным расстоянием понимается угол между направлением на центр планеты и направлением на звезду.
Привлечение избыточной первичной навигационной информации, полученной по измерениям на одном или нескольких мерных участках, априорных данных о ее статистических характеристиках при последующей статистической обработке этой информации с помощью бортовой цифровой вычислительной машины (БЦВМ) позволяет производить оценки вектора определяемых навигационных параметров. Общим недостатком решения навигационной задачи с помощью перечисленных способов автономной навигации является низкая точность определения параметров движения центра масс КА, обусловленная инструментальными и методическими погрешностями бортовых навигационных измерений, неполным учетом в навигационных алгоритмах сил, фактически воздействующих на КА в полете, погрешностями физических констант, определяющих закон движения, погрешностями счета на БЦВМ и др.
Наиболее близким к предложенному по составу навигационных измерений является способ определения параметров движения центра масс КА [4], заключающийся в измерении зенитных расстояний 2-х звезд и высоты полета над поверхностью планеты при статистической обработке этой информации с целью определения параметров движения центра масс КА. Измерение высоты полета КА и определение направления на центр планеты осуществляются с помощью построителя местной вертикали - радиовертикаль-высотомера (РВВ). Направления на звезды определяются двумя астровизирующими устройствами (АВУ). Недостатком данного способа является низкая точность определения на основе его параметров движения центра масс КА.
Установлено, что из перечисленных выше причин ошибок решения навигационных параметров наибольший вес имеют погрешности бортовых измерений, и в частности, в значительной степени точность определения параметров движения центра масс КА зависит от точности измерения зенитных расстояний звезд. Анализ существующих измерительных средств показывает, что основную погрешность в их определение вносит использующийся для измерения углов отклонения вертикальной оси КА от местной географической вертикали РВВ [3]. Эти углы являются углами ориентации КА по тангажу и крену.
Целью изобретения является повышение точности определения навигационных параметров системой автономной навигации КА.
Поставленная цель достигается организацией (после решения навигационной задачи известным способом) в рамках 2-го этапа циклического решения задачи определения ориентации КА по звездам с использованием полученных ранее параметров движения центра масс КА, по результатам которой уточняются первичные навигационные параметры (зенитные расстояния звезд), и навигационной задачи по этим уточненным значениям.
Сущность изобретения заключается в следующем. Использование информации об ориентации оптических осей АВУ относительно связанной системы координат, знание направляющих косинусов визируемых звезд в геоцентрической экваториальной системе координат, а также параметров движения центра масс КА позволяют решить задачу определения углов отклонения связанной системы координат относительно подвижной орбитальной системы координат, т.е. задачу определения ориентации.
Очевидно, что используя уточненные значения углов ориентации КА для формирования уточненных значений зенитных расстояний звезд и решая по ним навигационную задачу на следующем этапе, за определенное количество циклов последовательных решений задач ориентации и навигации можно повысить точность определения навигационных параметров.
На чертеже представлена функциональная схема предложенного способа уточнения параметров движения КА.
Алгоритм решения задачи навигации при использовании предлагаемого способа заключается в следующем. На 1-м этапе решается навигационная задача [2], исходными данными для которой являются:
углы ориентации оптических осей АВУ, визирующих звезды α и δ, информация с РВВ об углах тангажа и крена ϑрвв и γрвв (по этим данным рассчитываются зенитные расстояния β согласно выражения β = arccos[cosδ•cos(α-ϑ)+sinγ•sinδ]), а также высоте Н полета КА над поверхностью Земли, измеренные на текущие моменты времени на мерном интервале;
номинальные значения параметров движения КА в начальный момент времени;
ковариационная матрица ошибок измерений Кd.
В результате статистической обработки всей этой информации с помощью метода наименьших квадратов определяются поправки, рассчитываемые согласно выражению
Δq = (WTKdW)-1WTKdΔd,
где W - матрица частных производных измеряемых параметров по определяемым параметрам вектора навигационных параметров 
Δd - вектор отклонений измеряемых параметров от расчетных значений.
Прибавляя эти поправки к номинальным значениям параметров движения за определенное количество итераций формируется вектор навигационных параметров Q.
На 2-м этапе, этапе совместного решения задач навигации и определения ориентации, алгоритм делится на циклы последовательных выполнений режимов ориентации и навигации.
В каждом цикле решение задачи определения ориентации происходит с учетом знания уточненного вектора навигационных параметров, полученного на 1-м этапе.
Метод решения задачи ориентации по звездам основан на существовании функциональной зависимости углов ориентации КА от углов ориентации оптических осей АВУ в подвижной орбитальной системе координат и параметров движения центра масс КА [5].
Суть совместного решения задач навигации и определения ориентации заключается в том, что по измеренным углам ориентации оптических осей АВУ α и δ и вычисленным их истинным значениям, для чего используются полученные на предыдущем, шаге координаты центра масс КА, рассчитываются углы ориентации ϑp и γp. По более точным значениям углов ориентации рассчитываются уточненные значения зенитных расстояний звезд, которые используются затем при решении навигационной задачи на следующем шаге. Циклическое решение задач навигации и определения ориентации повторяется несколько раз до тех пор, пока поправки к определяемому вектору навигационных параметров станут меньше установленного значения.
Таким образом, предлагаемый способ автономной навигации позволяет повысить точность определения параметров движения центра масс КА за счет использования при решении навигационной задачи более точных измерений первичных навигационных параметров - зенитных расстояний звезд.
Список используемой литературы
1. А.П. Разыграев. Основы управления полетом космических полетов. - М.: "Машиностроение", 1990.
2. В. В. Смирнов, А.А. Казько, Ю.П. Маковецкий. Основы автономной навигации космических аппаратов. - М.: МО СССР, 1982.
3. Л.Ф. Порфирьев, В.В. Смирнов, В.И. Кузнецов. Аналитические оценки точности автономных методов определения орбит. - М.: "Машиностроение", 1987.
4. Математическое и программное обеспечение системы автономной навигации КА "Янтарь". - М.: МО СССР, 1986.
5. В. И. Кочетков. Системы астрономической ориентации космических аппаратов. - М.: "Машиностроение", 1980.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2247945C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2006 |
|
RU2318188C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ НА ОСНОВЕ ВИРТУАЛЬНЫХ ИЗМЕРЕНИЙ ЗЕНИТНЫХ РАССТОЯНИЙ ЗВЕЗД | 2010 |
|
RU2454631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1998 |
|
RU2155933C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| СПОСОБ АВТОНОМНОЙ НАВИГАЦИИ И ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2021 |
|
RU2776096C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ КОЛЕБАНИЙ УПРУГОГО ЭЛЕМЕНТА ПЕРЕМЕННОЙ ЖЕСТКОСТИ | 2001 |
|
RU2192662C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
Изобретение относится к области космической навигации, в частности к системам автономной навигации. Измеряют высоту полета над поверхностью планеты. Осуществляют циклическое вычисление зенитных расстояний двух звезд на основе измерений углов ориентации КА и ориентации оптических осей астровизирующих устройств относительно связанной системы координат. Определяют навигационные параметры КА при статической обработке измерительной информации за мерный участок. В каждом цикле дополнительно уточняют углы ориентации КА. На основе уточненных значений углов и информации об ориентации оптических осей астровизирующих устройств уточняют значения зенитных расстояний звезд. Используют уточненные значения при решении навигационной задачи в текущий период. Обеспечивается повышение точности определения навигационных параметров КА. 1 ил.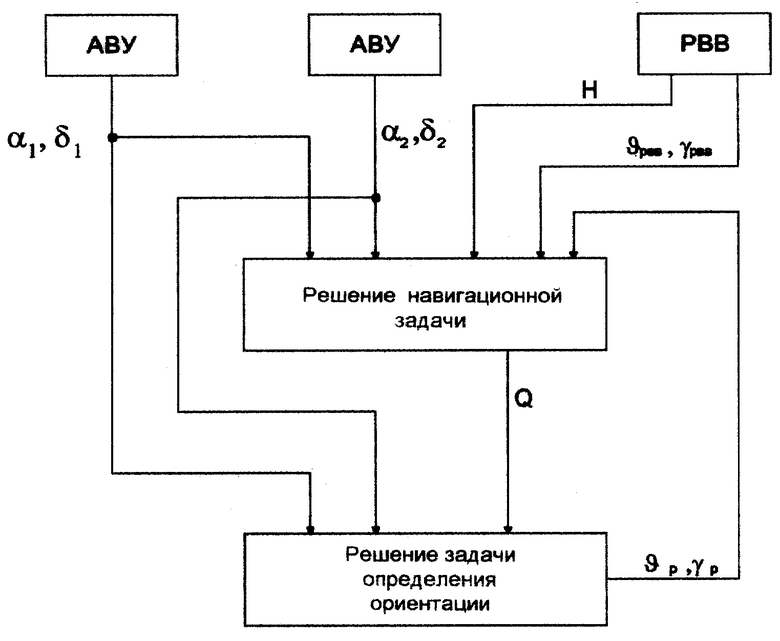
Способ уточнения параметров движения центра масс КА, заключающийся в измерении высоты полета над поверхностью планеты, циклическом вычислении зенитных расстояний двух звезд на основе измерений углов ориентации КА и ориентации оптических осей астровизирующих устройств (АВУ) относительно связанной системы координат и определении навигационных параметров КА при статической обработке измерительной информации за мерный участок, отличающийся тем, что в каждом цикле дополнительно уточняют, используя выборку измерений вектора навигационных параметров, полученную в предыдущем цикле, углы ориентации КА и на основе уточненных значений этих углов и информации об указанной ориентации оптических осей АВУ уточняют значения зенитных расстояний звезд, используемых при решении навигационной задачи в текущем цикле.
| Математическое и программное обеспечение системы автономной навигации КА "Янтарь" | |||
| - М., МО СССР, 1986 | |||
| УСТРОЙСТВО ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ ПОПРАВОК | 1998 |
|
RU2138060C1 |
| УСТРОЙСТВО КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2042922C1 |
| US 3792270, 12.02.1974 | |||
| Пожарный двухцилиндровый насос | 0 |
|
SU90A1 |
