Изобретение относится к автоматическому регулированию и может быть использовано для линейных динамических объектов периодического действия с запаздыванием по управлению.
Наиболее близким техническим решением к предлагаемому является система автоматического регулирования, содержащая измеритель рассогласования, усилитель, сглаживающий фильтр, сумматор, первый двухпозиционный переключатель, первый и второй идентичные блоки записи-воспроизведения информации, второй двухпозиционный переключатель, исполнительное устройство, таймерное устройство, объект регулирования, датчик обратной связи, программное устройство, на вход измерителя рассогласования поступает с программного устройства управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу, образующаяся на выходе измерителя рассогласования разность текущего значения выходного параметра объекта регулирования и управляющего воздействия поступает на вход усилителя, а с выхода усилителя через сглаживающий фильтр - на один из входов сумматора, выходной сигнал сумматора подается на вход исполнительного устройства и одновременно, через двухпозиционный переключатель, на вход одного из блоков записи-воспроизведения информации, находящегося в режиме записи информации, на второй вход сумматора через первый двухпозиционный переключатель поступает выходной сигнал второго блока записи-воспроизведения информации, находящегося в режиме воспроизведения информации.
Недостатком этой системы регулирования, в случае наличия в объекте запаздывания по управлению, является ее неустойчивость в периодическом режиме. Указанный недостаток исключает возможность применения подобных регуляторов в линейных системах периодического действия, обладающих запаздыванием.
Целью изобретения является обеспечения возможности регулирования объектами с запаздыванием по управлению в периодических режимах.
Поставленная цель достигается тем, что в систему, содержащую измеритель рассогласования, на вход которого поступает с программного устройства управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу, образующаяся на выходе измерителя рассогласования разность текущего значения выходного параметра объекта регулирования и управляющего воздействия поступает на вход усилителя, а с выхода усилителя через сглаживающий фильтр - на первый вход первого сумматора, выход которого подключен к входам исполнительного устройства и второго двухпозиционного переключателя, выходы которого подсоединены к входам блоков записи-воспроизведения информации, выходы блоков записи-воспроизведения информации связаны с входами первого двухпозиционного переключателя, выход которого подключен ко второму входу первого сумматора, выходы таймерного устройства подключены к управляющим входам двухпозиционных переключателей и блоков записи-воспроизведения информации, выход исполнительного устройства подсоединен к входу объекта регулирования, выход которого связан с входом датчика обратной связи, выход датчика обратной связи подключен к входу измерителя рассогласования, введены блок дополнительной задержки на величину g = T - τ, где T - период управляющего воздействия, τ - величина запаздывания объекта по управлению, блок динамической модели объекта, второй сумматор, первый и второй блоки записи-воспроизведения имеют период управляющего воздействия 2T, при этом вход блока дополнительной задержки подключен к выходу первого сумматора, а выход - ко входу исполнительного устройства, вход блока динамической модели объекта подключен к выходу первого сумматора, а выход - к первому входу второго сумматора, второй вход второго сумматора связан с выходом датчика обратной связи, а выход второго сумматора связан со входом измерителя рассогласования.
Вводя в систему блок дополнительной задержки на величину g = T - τ, блок динамической модели объекта, второй сумматор, последовательное включение первого сумматора и первого и второго блоков записи-воспроизведения с периодом управляющего воздействия 2T с параллельно соединенным объектом и блоком динамической модели объекта дают математическое описание, эквивалентное прототипу, что обеспечивает условие асимптотической устойчивости системы управления и выполнение целевых условий, состоящих в совпадении динамического задающего периодического воздействия и выхода объекта с запаздыванием по управлению.
На чертеже представлена блок-схема системы.
Система содержит измеритель рассогласования 1, усилитель 2, сглаживающий фильтр 3, первый сумматор 4, первый двухпозиционный переключатель 5, первый 6 и второй 7 идентичные блоки записи-воспроизведения информации, второй двухпозиционный переключатель 8, исполнительное устройство 9, таймерное устройство 10, объект регулирования 11, датчик обратной связи 12, программное устройство 13, блок дополнительной задержки 14, блок динамической модели объекта регулирования без запаздывания 15, второй сумматор 16.
Система функционирует следующим образом.
На первый вход измерителя 1 рассогласования поступает с программного устройства 13 управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу. Образующаяся на выходе измерителя рассогласования разность текущего значения выходного параметра объекта регулирования и управляющего воздействия поступает на вход усилителя 2, а с выхода усилителя через сглаживающий фильтр 3 - на один из входов первого сумматора 4. На второй вход первого сумматора 4 через двухпозиционный переключатель 5 поступает выходной сигнал с запаздыванием на величину τ одного из блоков 6,7 записи-воспроизведения информации, находящегося в режиме воспроизведения информации. Выходной сигнал первого сумматора 4, сформированный как сам сигнал плюс этот же сигнал с запаздыванием, подается на вход блока динамической модели объекта 15, на вход блока дополнительной задержки 14 и на вход второго двухпозиционного переключателя 8, выходы которого подсоединены к одному из входов блоков 6, 7 записи-воспроизведения информации, находящегося в режиме записи информации, выходы блоков записи-воспроизведения информации связаны с входами первого двухпозиционного 5 переключателя. Выходы таймерного устройства 10 подключены к управляющим входам двухпозиционных переключателей 5, 8 и блоков 6, 7 записи-воспроизведения информации. Сигнал с задержкой на величину g с выхода блока дополнительной задержки 14 поступает на вход исполнительного устройства 9, выход которого подключен к входу объекта регулирования 11, выход которого соединен с входом датчика обратной связи 12, сигнал с задержкой с выхода датчика обратной связи поступает на первый вход второго сумматора 16, на второй вход которого поступает сигнал с выхода блока динамической модели объекта 15, сигнал с выхода второго сумматора 16 поступает на второй вход измерителя рассогласования 1.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ | 2001 |
|
RU2205440C1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2011 |
|
RU2449337C1 |
| Система автоматического регулирования | 1975 |
|
SU723510A1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2210800C2 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2000 |
|
RU2173871C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ | 1998 |
|
RU2130636C1 |
| РОБАСТНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2204858C1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЯМИ ПО СОСТОЯНИЮ И УПРАВЛЕНИЮ | 2001 |
|
RU2204156C2 |
Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов периодического действия с запаздыванием по управлению. Технический результат заключается в повышении точности регулирования в периодическом режиме с повторяющимся характером возмущений для объектов с запаздыванием по управлению. Система содержит измеритель рассогласования, усилитель, сглаживающий фильтр, два блока записи-воспроизведения информации, два двухпозиционных переключателя, два сумматора, программное устройство, блок дополнительной задержки, блок динамической модели объекта регулирования без запаздывания, датчик обратной связи, таймерное устройство, объект регулирования. 1 ил.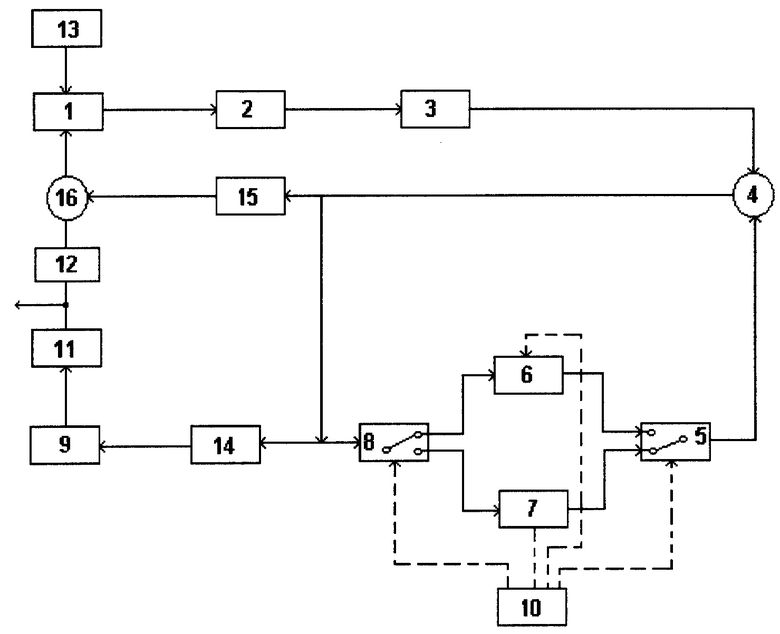
Автоматическая система регулирования для объектов с запаздыванием по управлению, содержащая измеритель рассогласования, вход которого предназначен для приема управляющего воздействия с программного устройства, выход измерителя рассогласования через усилитель подключен к входу сглаживающего фильтра, выход сглаживающего фильтра соединен с первым входом первого сумматора, второй вход первого сумматора подключен к выходу первого двухпозиционного переключателя, а выход - к входу второго двухпозиционного переключателя, выходы которого подсоединены ко входам блоков записи-воспроизведения информации, выходы блоков записи-воспроизведения информации связаны с входами первого переключателя, выходы таймерного устройства подключены к управляющим входам двухпозиционных переключателей и блоков записи-воспроизведения информации, выход исполнительного устройства соединен с входом объекта регулирования, выход которого подключен к входу датчика обратной связи, отличающаяся тем, что в систему введены блок дополнительной задержки, блок динамической модели объекта регулирования без запаздывания, второй сумматор, при этом вход блока дополнительной задержки подключен к выходу первого сумматора, а выход ко входу исполнительного устройства, вход блока динамической модели объекта регулирования без запаздывания подключен к выходу первого сумматора, а выход к первому входу второго сумматора, второй вход второго сумматора связан с выходом датчика обратной связи, а выход второго сумматора связан с соответствующим входом измерителя рассогласования.
| Система автоматического регулирования | 1975 |
|
SU723510A1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1990 |
|
SU1714572A1 |
| US 4054780 А, 18.10.1977 | |||
| СМИТ О.ДЖ | |||
| Автоматическое регулирование | |||
| - М.: Госфизматиздат, 1962, с.429. | |||
