1
Изобретение относится к автоматическому ретулированию и может использоваться,в качестве прецизионного регулятора или измерителя в различного рода установках и приборах циклического действия с повторяющимся харак тером возмуще}шй, например, в станках с программным управлением.
Известна следящая система, содержащая последовательно включенные датчик рассогласования, усилитель, сглаживающий фильтр и объект регулирования 1.
Недостаток системы - относительно низкая точность регулирования в каждом цикле, обусловленная инерционностью следящей системы и ограниченностью ее коэффициента регулирования.
Известна система автоматического регулирования, содержащая измеритель рассогласования, выход которого через усилитель подключен ко входу сглаживающего фильтра, объект регулирования, вход которого подсодеинен к( выходу исполнительного устройства, датчик обратной связи, связанный с объектом регулирования, программно устройство, при этом
входы измерителя рассогласования подключены к выходам программного устройства и датчика обратной связи 2. В системах этого типа заранее известные компоненты входного сигнала компенсируются с помощью программного устройства, что позволяет несколько повысить точность слежения, так как при этом уменьшается требуемый динамический диапазон управляющих сигналов.
Недостаток устройства заключается в том, что вследствие погрещностей программного устройства и возможных медленных изменений от цикла к циклу свойств входного сигнала точность такой следящей системы остается невысокой, а возможности ее применения ограничиваются выбранной программой регулирования.
Цель изобретения - повыщение точности регулирования в циклическом режиме с повторяющимся характером возмущений.
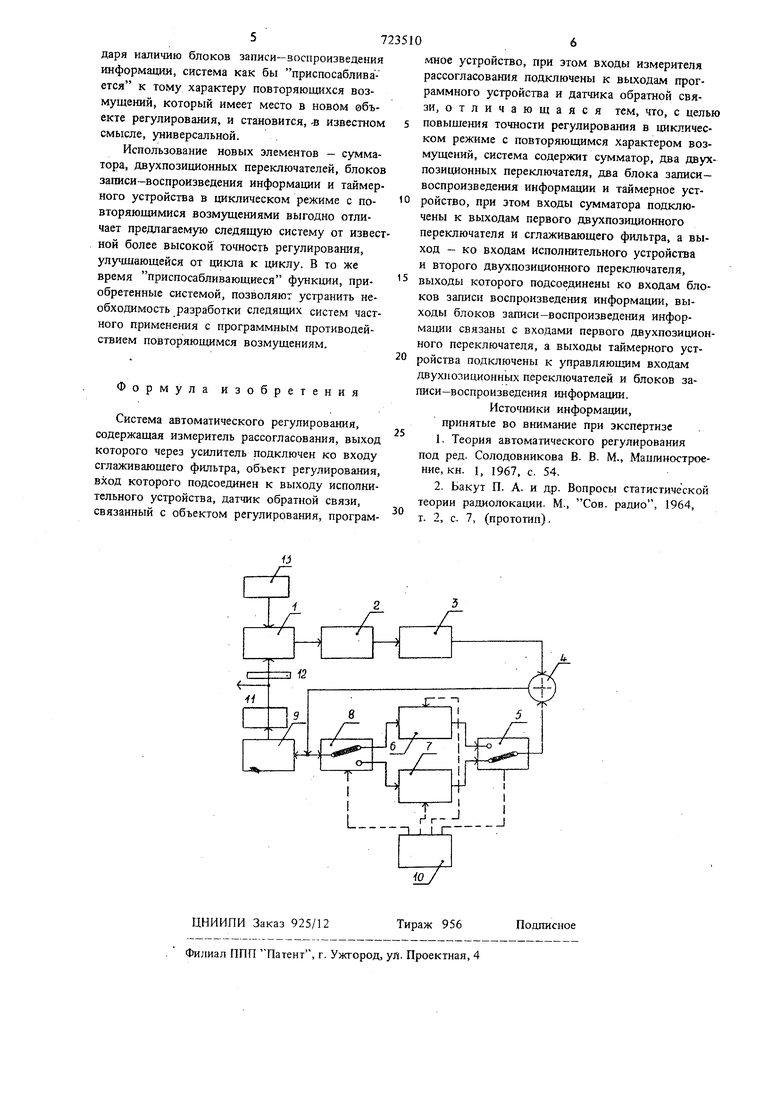
Цель Достигается тем, что система содержит сумматор, два двухпозиционных переключателя, два блока записи-воспроизведения информации и таймерное устройство, при этом входы сумматора подключены к выходам первого двухпозиционного переключателя и сглаживающего фильтра, а выход - ко входам исполнительного устройства и второго двухпозиционного переключателя, выходы которого подсоединены ко входам блоков записи-воспроизведения информации, выходов блоков записи-воспроизведения информации связаны со входами первого двухпозиционного переключателя, а выходы таймерного устройства подключены к управляющим входам двухпозиционных переключателей и блоков записи-воспроизведения информации. На чертеже представлена структурная схема предлагаемой системы. Предлагаемая система содержит измеритель рассогласования, усилитель 2, сглаживающий фильтр 3, сумматор 4, первый двухпозиционный- переключатель 5, первый 6 и второй 7 идентичные блоки записи-воспроизведения информации, второй двухпозиционный переключатель 8, исполнительное устройство 9, таймерное устройство 10, объект регулирования 11, датчик обратной связи 12, программное устройство 13. Система работает следующим образом. На вход измерителя 1 рассогласования поступает с программного устройства управляющее воздействие, изменение которого во времени в течение цикла строго повторяется от цикла к циклу. Образующаяся на выходе измерителя рассогласования разность текущего значения выходного параметра объекта регулирования и управляющего воздействия поступает на вход усилителя 2, а с выхода усилителя через сглаживающий фильтр 3 - на один из входов сумматора 4. Выходной сигнал сумматора 4 подается на вход исполнительного устройства 9 и одновременно, через двухпозицион ный переключатель 8, на вход одного из блоков (например, блока 6) записи-воспроизведе ния информации, находящегося в режиме запи си информации. На второй вход сумматора 4 через двз«позиционный переключатель 5 посту пает выходной сигнал блока 7 загшси-воспроизведения информации, находящегося в режим воспроизведения информации. Рассмотрим эволюцию процесса регулирова
ния в такой следящей системе от цикла к циклу so Далее.
Перед началом первого цикла двухпозиционные переключатели 5 и 8 находятся в положениях, изображенных на чертеже, а в блоках записи-воспроизведения информации 6 и 7 от сутствует какая-либо записанная информация.
По команде таймерного устройства 10 (начало первого цикла) одновременно происходит подача управляющего воздействия с выхода программного устройства 13, переключение двухТаким образом, от цикла к циклу происходит улучще 1Ие точности регулирования за счет использования набранного системой опыта регулирования в предьщущих циклах. 55 При использовании такой системы регулирования с другим объектом регулирования, где повторяющиеся возмущающие воздействия протекают во времени по другому закону, никаких изменений в системе не требуется. Благоозиционных переключателей 5 и 8 в другие поожения, перевод блока 6 записи-в оспроизвее1-шя информации из режима запись в режим воспроизведение, а блока 7 - из режима воспроизведение в режим запись. Поскольку записанная информация в блоке 6 записи-воспроизведения информации отсутствует, на второй вход сумматора 4 сигнал не поступает и регулирование в системе происходит по известной схеме в соответствии с управляющим воздействием, и возмущениями, возникающими в объекте регулирования. Одновременно весь процесс регулирования с выхода сумматора 4 записывается в блоке 7 записи- воспроизведения информации, но зта информация в первом цикле не используется. В момент начала второго цикла по команде таймерного устройства снова происходит подача на вход измерителя 1 рассогласования управляющего воздействия, соверщеино идентичного тому, которое использовалось в предыдущем цикле. Одновременно происходит переключение переключателей 5 и 8 и смена режимов в блоках 6 и 7 записи-воспроизведения информации. Теперь на втором входе сумматора 4 имеется сигнал, характеризующий процесс управления объектом регулировагшя на предыдущем цикле. В связи с тем, что на каждом новом цикле объект регулирования оказывается в одинаковых внешних физических условиях, возмущающее .воздействие в объекте регулирования протекает во времени практически так же, как. и возмущагощее воздействие на первом цикле. Поскольку информация о процессе регулирования на первом цикле используется на втором цик,де, динамический диапазон выходных сигналов измерителя рассогласозания уменьшается. Так как коэффициент регулирования в системе остался тем же, точность регулирования на втором цикле оказывается выше. Одновременно с-вышеописанным процессом регулирования на втором цикле снова происходит запись процесса регулирования с выхода сумматора 4, но теперь уже в блоке 6 записивоспроизведения информации. Эта информация будет использоваться в третьем цикле и так
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2011 |
|
RU2449337C1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 1999 |
|
RU2155983C1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ | 2001 |
|
RU2205440C1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
| Система автоматического управления циклическими процессами | 1983 |
|
SU1124247A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РАСХОДОВ ВОДЫ НА МАШИНЕ НЕПРЕРЫВНОЙ РАЗЛИВКИ МЕТАЛЛА | 2005 |
|
RU2302315C2 |
| Следящая система | 1980 |
|
SU885970A1 |
| Цифровая следящая система | 1990 |
|
SU1833835A1 |
| Цифровая следящая система | 1990 |
|
SU1835533A1 |
| Система автоматического регулирования | 1987 |
|
SU1476433A1 |
