тора 8 соединен с выходом источника возмущения, содержит второй сумматор 11, суммирующий вход которого соединен с выходом первого сравнивающего 6 элемента, вычитающий вход- с выходом второго сравнивающего 3 элемента, а выход - с входом
регулятора.7. Применение предлагаемой системы позволяет повысить качество-выпускаемой продукции за счет высокой точности управления, что приносит экономический эффект, зависящий от конкретного процесса производства. 4 ил.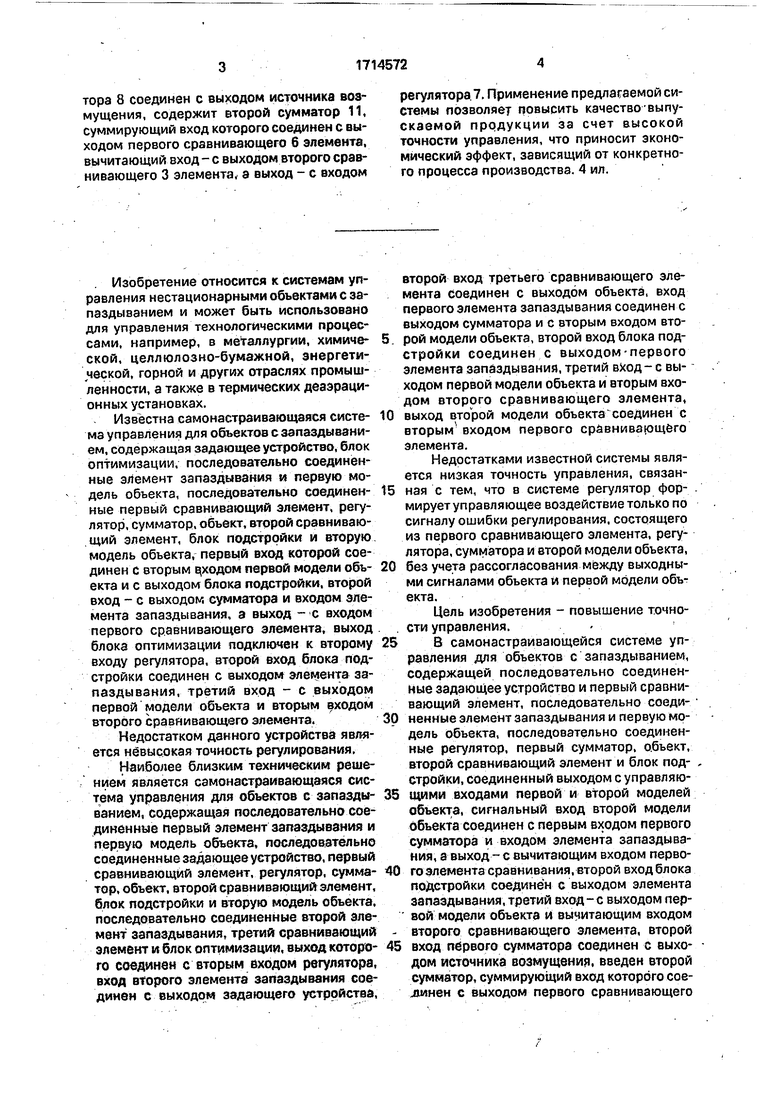
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления для объектов с запаздыванием | 1986 |
|
SU1305634A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Адаптивная система управления | 1985 |
|
SU1257612A1 |
| Самонастраивающаяся система управления для объектов с запаздыванием | 1980 |
|
SU932460A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1986 |
|
SU1383292A1 |
| Система управления для объектов с запаздыванием | 1979 |
|
SU860002A1 |
| Система управления для объектов с запаздыванием | 1983 |
|
SU1112342A1 |
| Система управления для объектов с запаздыванием | 1982 |
|
SU1070506A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
Изобретение относится к системам управления нестационарными объектами с за-- пзздыванием и может быть использовано для управления технологическими процессами, например, в металлургии, химической, целлюлозно-бумажной, энергетической, горной и других отраслях промыш-.<fii) иЮ%5(?Гфие.1|!^СПN4Ю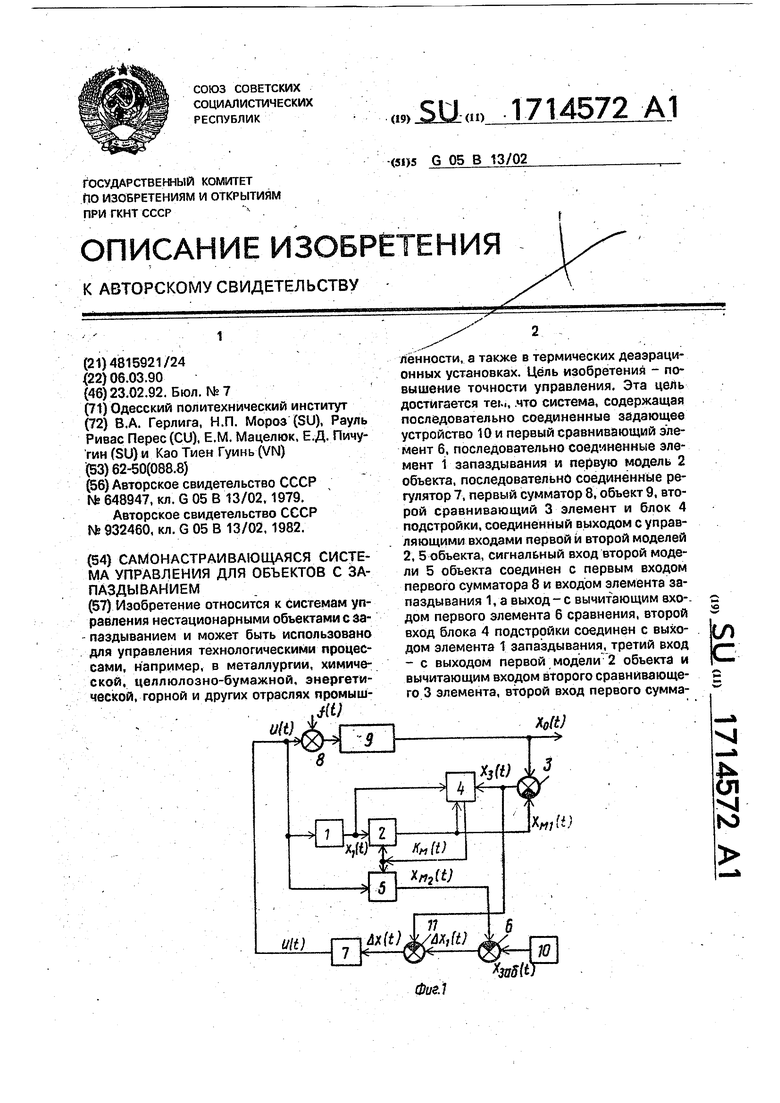
. Изобретение относится к системам управления нестационарными объектами с запаздыванием и может быть использовано для управления технологическими процессами, например, в мetaллypгии, химической, целлюлозно-бумажной, энергетической, горной и других отраслях промышленности, а также в термических деаэрационных установках.
Известна самонастраивающаяся система управления для обьектоа с запаздыванием, содержащая задающее устройство, блок оптимизации, последовательно соединенные элемент запаздывания и первую модель объекта, последовательно соединенные первый сравнивающий элемент, регулятор, сумматор, объект, второй сравнивающий элемент, блок подстройки и вторую, модель объекта, первый вход которой соединен с вторым Е(ходом первой модели объекта и с выходом блока подстройки, второй вход - с выходом сумматора и входом элемента запаздывания а выход - с входом первого сравнивающего элемента, выход блока оптимизации подключен к второму входу регулятора, второй вход блока подстройки соединен с выходом элемента запаздывания, третий вход - с выходом первой модели объекта и вторым входом второго сравнивающего элемента.
Недостатком данного устройства является невысокая точность регулирования.
Наиболее близким техническим решением является самонастраивающаяся сист ема управления для объектов с запаздыванием, содержащая последовательно соединенные первый элемент запаздывания и первую модель объекта, последовательно соединенные задающее устройство, первый сравнивающий элемент, регулятор, сумматор, объект, второй сравнивающий элемент, блок подстройки и вторую модель объекта, последовательно соединенные второй элемент запаздывания, третий сравнивающий элемент vt блок оптимизации, выход котор ого соединен с вторым входом регулятора, вход второго элеме|{та запаздывания соединен с выходом задающего устройства.
второй вход третьего сравнивающего элемента соединен с выходом объекта, вход первого элемента запаздывания соединен с выходом сумматора и с вторым входом второй модели объекта, второй вход блока подтройки соединен с выходом-первого элемента запаздывания, третий вход - с выходом первой модели объекта и вторым вхоом второго сравнивающего элемента,
выход второй модели объекта соединен с вторым входом первого срйвнивак)щбго элемента.
Недостатками известной системы является низкая точность управления, связанная с тем, что в системе регулятор формирует управляющее воздействие только по сигналу ошибки регулирования, состоящего из первого сравнивающего элемента, регулятора, сумматора и второй модели объекта,
без учета рассогласования между выходными сигналами объекта и первой модели объекта.
Цель изобретения - повышение точности управления..
В самонастраивающейся системе управления для объектов с запаздыванием, содержащей последовательно соединенные задающее устройство и первый сравнивающий элемент, последовательно соединенные элемент запаздывания и первую модель объекта, последовательно соединенные регулятор, первый сумматор, объект, второй сравнивающий элемент и блок подстройки, соединенный выходом с управляющими входами первой и второй моделей объекта, сигналъный вход второй модели Объекта соединен с первым входом первого сумматора и входом элемента запаздывания, а выход - с вычитающим входом первогоэлемента сравнивания, второй вход блока
подстройки соединён с выходом элемента
запаздывания, третий вход-с выходом первой модели объекта и вычитающим входом
второго сравнивающего элемента, второй
вход первого сумматора соединен с выходом источника возмущения, введен второй сумматор, суммируюидий вход которого соелинен с выходом первого сравнивающего
элемента, вычитаю.щий вход - с выходом второго сравнивающего элемента, а выход с входом регулятора.
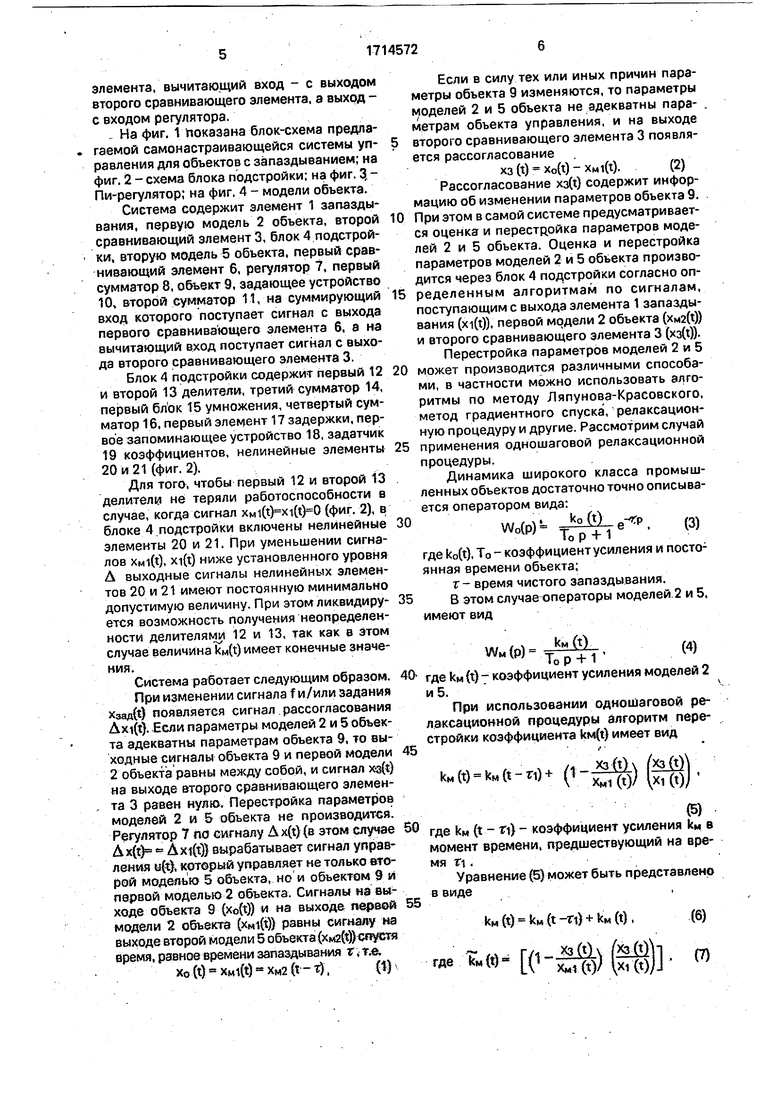
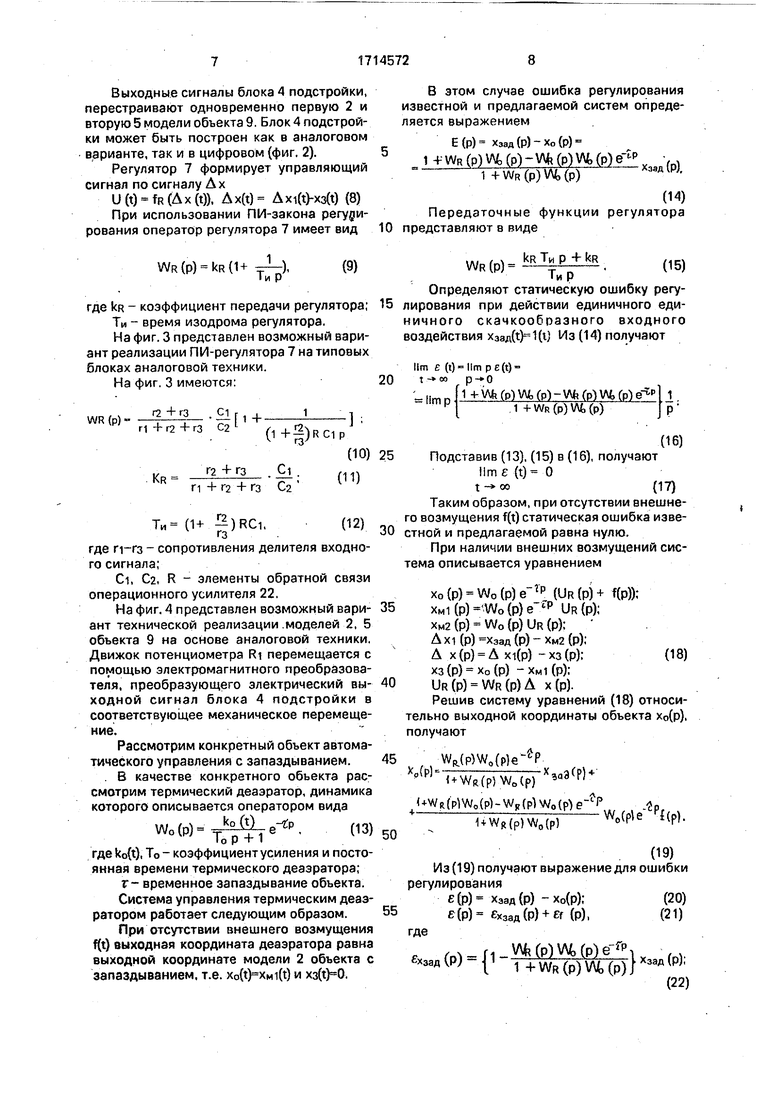
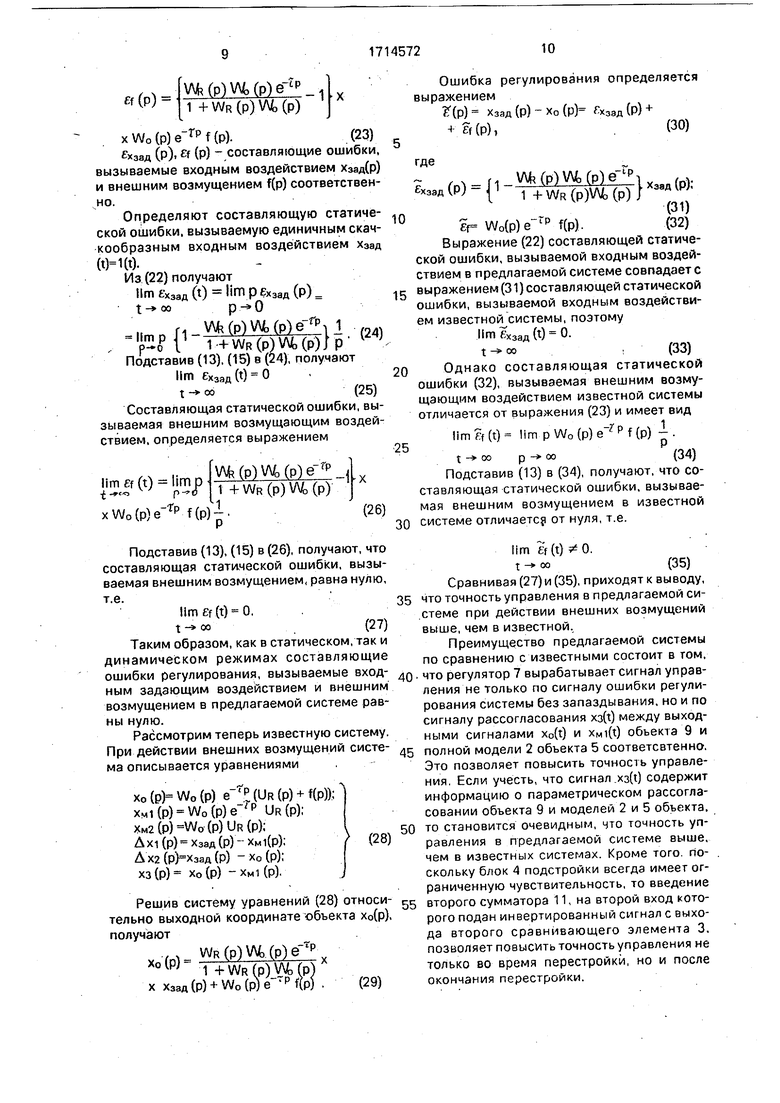
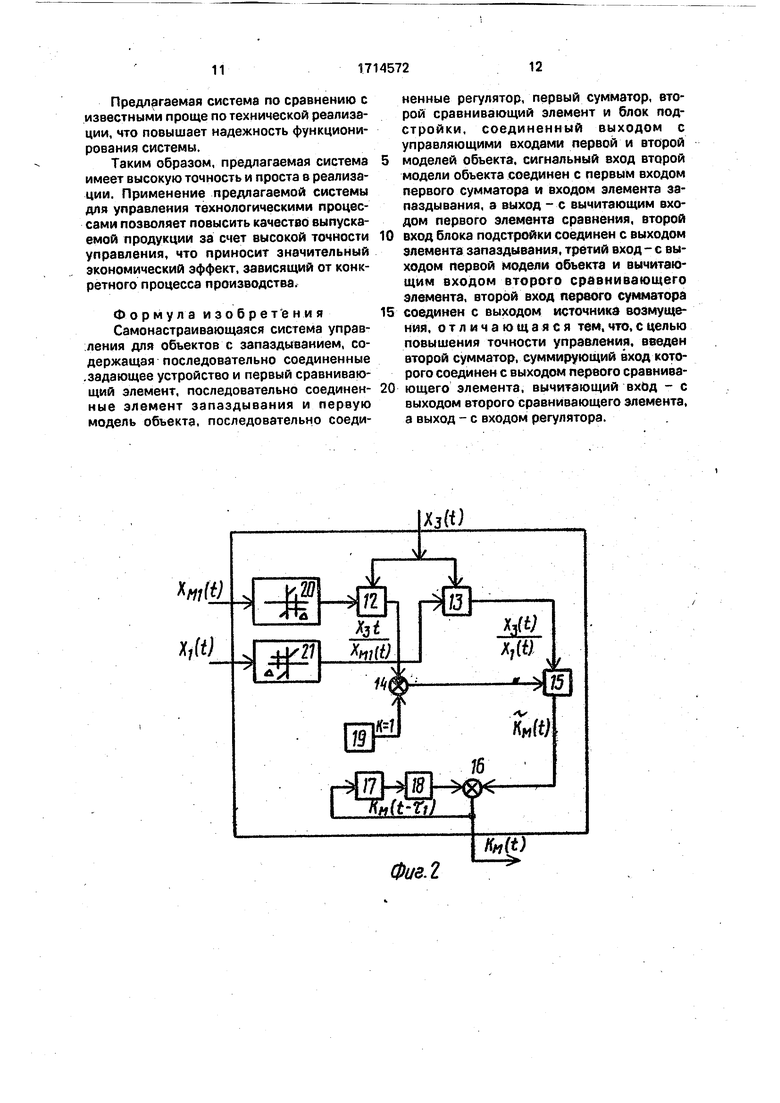
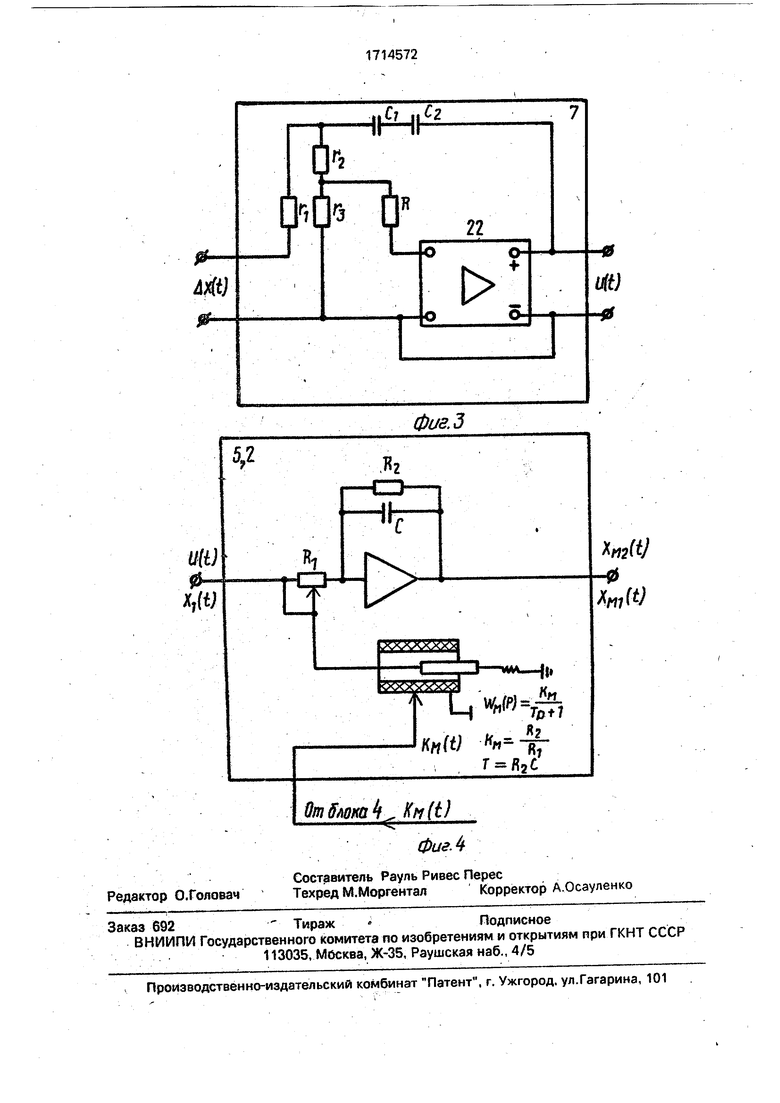
- На фиг. 1 показана блок-схема предлагаемой самонастраивающейся системы управления для объектов с запаздыванием; на фиг. 2 - схема блока подстройки; на фиг. 3,Пи-регулятор; на фиг. 4 - модели объекта.
Система содержит элемент 1 запаздывания, первую модель 2 объекта, второй сравнивающий элемент 3, блок 4 подстройки, вторую модель 5 объекта, первый сравнивающий элемент 6, регулятор 7, первый сумматор 8, о&ьект 9, задающее устройство 10, второй сумматор 11, на суммирующий вход которого поступает сигнал с выхода первого сравнивающего элемента б, а на вычитающий вход поступает сигйал с выхода второго сравнивающего элемента 3.
Блок 4 подстройки содержит первый 12 и второй 13 делители, третий сумматор 14, первый блок 15 умножения, четвертый сумматор 16, первый Элемент 17 задержки, первое запоминающее устройство 18, задатчик
19коэффициентов, нелинейные элементы
20и 21 (фиг. 2).
Для того, чтобы первый 12 и второй 13 делители не теряли работоспособности в случае, когда сигнал Хм1(х)х1(1)0(фиг. 2), в блоке 4 подстройки включены нелинейные элементы 20 и 21. При уменьшении сигналов XMi(t), xi{t) ниже установленного уровня Д выходные сигналы нелинейных элементов 20 и 21 имеют постоянную минимально допустимую величину. При этом ликвидируется возможность получения неопределенности делителями 12 и 13, так как в этом случае величина (1) имеет конечные значения.
Система работает следующим образом.
При изменении сигнала f и/или задания хзадС1) появляется сигнал рассогласования Axi(t). Если параметры моделей 2 и 5 объекта адекватны параметрам объекта 9, то выходные сигналы объекта 9 и первой модели 2 объекта равны между собой, и сигнал з(«) на выходе второго сравнивающего элемента 3 равен нулю. Перестройка параметров моделей 2 и & объекта не производится. Регулятор 7 W сигналу Д x(t)(B этом случае Ax{t) « А xi(t)} вырабатывает сигнал управления u(t), кот©рьй1 управляет не только «торой моделью 5 объекта, но и объектом 9 и первой моделью 2 объекта. Сигналы ма выходе объекта 9 Cxo{t)) и на выходе первой модели 2 объекту (xMi(t)) равны сигналу на выходе второй модели 5 объекта (хкй(фсггустя время, равное времени запаздывания 7 т.
хо (t) - XMi(t)« Хм2 (t - г).(t) N
Если в силу тех или иных причин параметры объекта 9 изменяются, то параметры моделей 2 и 5 объекта не адекватны пара- . метрам объекта управления, и на выходе
второго сравнивающего элемента 3 появляется рассогласование
хз (t) xo(t) - XMi(t).(2)
Рассогласование X3(t) содержит информацию об изменении параметров объекта 9.
0 При этом в самой системе предусматривается оценка и перест ойка параметров моделей 2 и 5 объекта. Оценка и перестройка параметров моделей 2 и 5 производится через блок 4 подстройки согласно оп5 ределенным алгоритмам по сигналам, поступающим с выхода элемента 1 запаздывания (xi(t)), первой модели 2 объекта (хм2(х)) и второго сравнивающего элемента 3 {x3(t)). Перестройка параметров моделей 2 и 5
0 может производится различными способами, в частности можно использовать алгоритмы по методу Ляпунова-Красовского, метод градиентного спуска, релаксационную процедуру и другие. Рассмотрим случай
5 применения одношаговой релаксационной процедуры.
Динамика широкого класса промышленных объектов достаточно точно описывается оператором вида:
koCt)
0
(3)
Wo(p)
Тор + 1
где ko(t), TO - коэффициент усиления и постоянная времени объекта;
т - время чистого запаздывания. 5 В этом случае операторы моделей,2 и 5, имеют вид
kM(t)
WM(P)
(4)
То р + 1
где RM (t) - коэффициент усиления моделей 2 и 5.
При использовании одношаговой релаксац юнной процедуры алгоритм перестройки коэффициента kM(t) имеет вид ..
,„й.,„(,-.„(1-)(||),
(S)
где Км (t - f i) - коэффициент усиления kn в момент времени, предшествующий на время г.
Уравнение (5) может быть представлено в виде
(6)
kw (t) kM (t-П) + kM (t) ,
)Выходные сигналы блока 4 подстройки, перестраивают одновременно первую 2 и вторую 5 модели объекта 9. Блок 4 подстройки может быть построен как в аналоговом варианте, так и в цифровом (фиг, 2).
Регулятор 7 формирует управляющий сигнал по сигналу Дх
U(t) fR(Ax(t)), Ax(t) Axi(t}-X3(t) (8)
При использовании ПИ-закона регу ирования оператор регулятора 7 имеет вид WR(p) kR(1+ -Л-), где kR - коэффициент передачи регулятора: 15 Ти - время изодрома регулятора, На фиг. 3 представлен возможный вариант реализации ПИ-регулятора 7 на типовых блоках аналоговой техники. На фиг. 3 имеются:20 Г2 -Ь гз . С П + Г2 + гз С2 0+i)Rcip К Г2 + гз , С . (11) Г1 + Г2 -I- Гз С2 Ти (1+ -)RCi, где Г1-ГЗ - сопротивления делителя входного сигнала; Ci, С2, R - элементы обратной связи операционного усилителя 22. На фиг, 4 представлен возможный вари- 35 ант технической реализации .моделей 2,5 объекта 9 на основе аналоговой техники. Движок потенциометра RI перемещается с помощью электромагнитного преобразователя, преобразующего электрический вы- 40 ходной сигнал блока 4 подстройки в соответствующее механическое перемещение. Рассмотрим конкретный объект автоматического управления с запаздыванием. 45 . В качестве конкретного объекта рассмотрим термический деаэратор, динамика которого описывается оператором вида Wo(p) TO р -Ы где ko{t), TO - коэффициент усиления и постоянная времени термического деаэратора; г- временное запаздывание объекта. Система управления термическим деаэратором работает следующим образом. 55 При отсутствии внешнего возмущения f(t) выходная координата деаэратора равна выходной координате модели 2 объекта с запаздыванием, т.е. xo(t)XMi(t) и хз(1)0.
в этом случае ошибка регулирования известной и предлагаемой систем определяется выражением
Е (р) Хзад (р) - Хо (р)
1 +-WR(p)(p)-Wh(p)W(p) ° 1+WR(p)Afe(p) (PJ(14)
Передаточные функции регулятора 10 представляют в виде лир ни воз U t (10) 25 го стн тем тел по u ре е, «х WR(p) Определяют статическую ошибку регуования при действии единичного единого скачкообразного входного ействия хзад(1)1(1 Из (14) получают (t)llm pe(t) - 00 р - О im р )(p)-Wi(p)W.fp) ,1+WR(P)W,(P) Подставив (13), (15) в (16), получают llm(t)0 (17) Таким образом, при отсутствии внешнеозмущения f(t) статическая ошибка извей и предлагаемой равна нулю. При наличии внешних возмущений сиса описывается уравнением xo(p) Wo(p) (UR(P)+ f(p)); XMi(p)Wo(p)eP UR(P); хм2 (р) Wo (р) UR (р): Ах1(р)хзад(р)-хм2(р): А x(p) Axi(p)-хз(р):(18) ХЗ(Р) ХО(Р) -хм1(р): UR(P) WR(P)A х(р). Решив систему уравнений (18) относино выходной координаты объекта Хо(р), учают W(p)W,(p)e +WR(p)Wo(p) R(pmo(p)-Wy(p)Wo(p) W,(ple- f(p). UWR(p)Wo(p) Из (19) получают выражение для ошибки лирования Б(р) Хаад(р) -Хо(р),-(20) Б(Р) е)сзад(р) + г (р)-(21) (pN-f1-W Cp)W(p). д (Р) |1 (р) Хзад (р), ,,(p) |)/Mp) 11 + WR (p) VU, (P) у . X Wo (p) f (p).(23) хзад (p), f (p) - составляющие ошибки, вызываемые входным воздействием Хзад(р) и внешним возмущением f(p) соответствен но. Определяют составляющую статической ошибки, вызываемую единичным скачкообразным входным воздействием хзад (t)1(t). Из (22) получают llm Ехзад (О lim р Ехзад (р) t - 00р - о Н1тр/1-(Р)(Р)Ч1 (24) ,. роЧ i+WR(p)A(,(p)lp Подставив (13). (15) в (24), получают Im ехзад(г) 0 (25) Составляющая статической ошибки, вызываемая внешним возмущающим воздействием, определяется выражением Л(р)УЧ,(р) lim f (t) lim p 1 -ь WR (р) Л4 (р) c/op-O xWo(p) f(p). Подставив (13). (15) в (26), получают, что составляющая статической ошибки, вызываемая внешним возмущением, равна нуЛю, т.е. (t) 0, t - 00(27) Таким образом, как в статическом, так и динамическом режимах составляющие ошибки регулирования, вызываемые входным задающим воздействием и внешним возмущением в предлагаемой системе равны нулю. Рассмотрим теперь известную систему. При действии внешних возмущений система описывается уравнениями XO(P)WO(P) (UR(p) + f(p)); Xv,i(p) Wo(p) UR(P); XM2(p)Wo(p)UR(p); Ах1(р)хзад(р)-хм1(р); A X2 ( (p) - Xo (p); хз(р) Xo(p) -XMI(P). Решив систему уравнений (28) относительно выходной координате объекта Хо(р). получают х,(р) MieiyMple: 1 +WR(P)W,(P) .) + Wo(p)(pb X Хзад(р) Ошибка регулирования определяется выражением г (р) Хзад (р) Хо (р) хзад(р) + + f(p),(30) / л fi (p)(p) ,, (Р) ( l+WR(p)w.(p)} Р (31) f Wo(p) f(p).(32) Выражение (22) составляющей статической ошибки, вызываемой входным воздействием в предлагаемой системе совпадаете выражением (31) составляющей статической ошибки, вызываемой входным воздействием известной системы, поэтому 1т хзадМ 0. ,(33) Однако составляющая статической ошибки (32), вызываемая внешним возмущающим воздействием известной системы отличается от выражения (23) и имеет вид lim Kf (t) limp Wo (p) e f (p) - . P t - 00 p - 00(34) Подставив (13) в (34), получают, что составляющая статической ошибки, вызываемая внешним возмущением в известной системе отличаете от нуля, т.е. lim ef(t)0. t - 00(35) Сравнивая (27) и (35), приходят к выводу, что точность управления в предлагаемой си.стеме при действии внешних возмущений выше, чем в известной. Преимущество предлагаемой системы по сравнению с известными состоит в том. что регулятор 7 вырабатывает сигнал управления не только по сигналу ошибки регулирования системы без запаздывания, но и по сигналу рассогласования хз(т) между выходными сигналами xo(t) и XMi(t) объекта 9 и полной модели 2 объекта 5 соответсвтенно. Это позволяет повысить точность управления, Если учесть, что сигнал ,X3(t) содержит информацию о параметрическом рассогласовании объекта 9 и моделей 2 и 5 объекта. то становится очевидным, что точность управления в предлагаемой системе выше, чем в известных системах. Кроме того. Поскольку блок 4 подстройки всегда имеет ограниченную чувствительность, то введение второго сумматора 11, на второй вход которого подан инвертированный сигнал с выхода второго сравнивающего элемента 3. позволяет повысить точность управления не только во время перестройки, но и после окончания перестройки.
Предлагаемая система по сравнению с известными проще по технической реализации, что повышает надежность функционирования системы.
Таким образом, предлагаемая система имеет высокую точность и проста в реализации. Применение предлагаемой системы для управления технологическими процессами позволяет повысить качество выпускаемой продукции за счет высокой точности управления, что приносит значительный экономический эффект, зависящий от конкретного процесса производства.
Формула изобретения Самонастраивающаяся система управ:ления для объектов с запаздыванием, содержащая последовательно соединенные .задающее устройство и первый сравнивающий элемент, последовательно соединенные элемент запаздывания и первую модель объекта, последовательно соединенные регулятор, первый сумматор, второй сравнивающий элемент и блок подстройки, соединенный выходом с управляющими входами первой и второй
моделей объекта, сигнальный вход второй модели объекта соединен с первым входом первого сумматора и входом элемента запаздывания, а выход - с вычитающим входом первого элемента сравнения, второй
вход блока подстройки соединен с выходом элемента запаздывания, третий вход - с выходом первой модели объекта и вычитающим входом второго срдвнивающего элемента, второй вход первого сумматора
соединен с выходом источника воэмущения, отличающаяся тем. что, с целью повышения точности управления, введен второй сумматор, суммирующий вход которого соединен с выходом первого сравнивающего элемента, вычитающий вхЬд - с выходом второго сравнивающего элемента, а выход - с входом регулятора.
Фиг.2
фаг.З
| Система управления для объектов с запаздыванием | 1977 |
|
SU648947A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
